SSD网络结构
SSD算法,其英文全名是Single Shot MultiBox Detector。
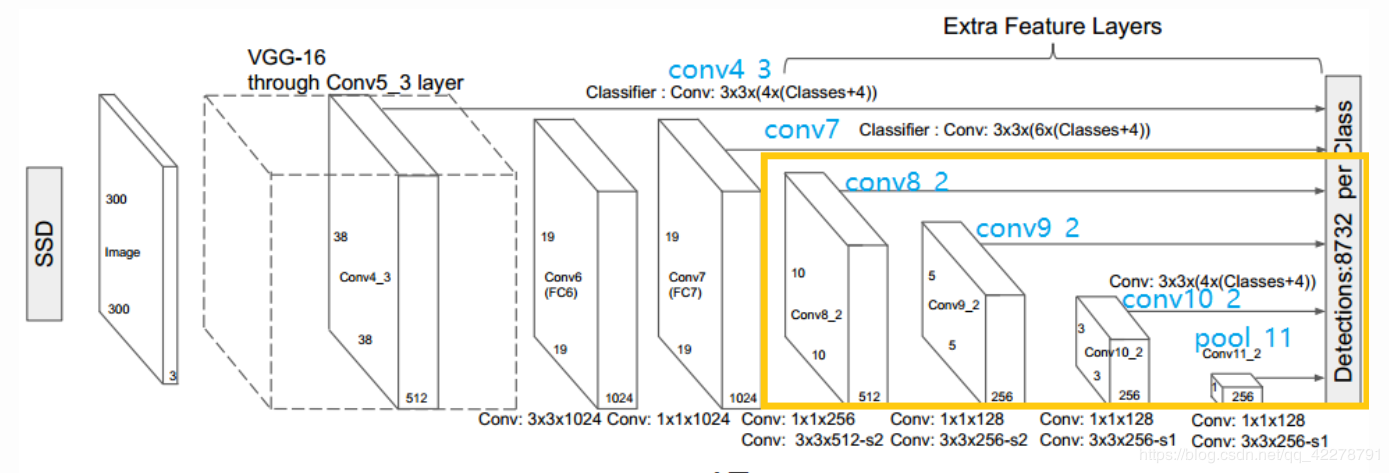
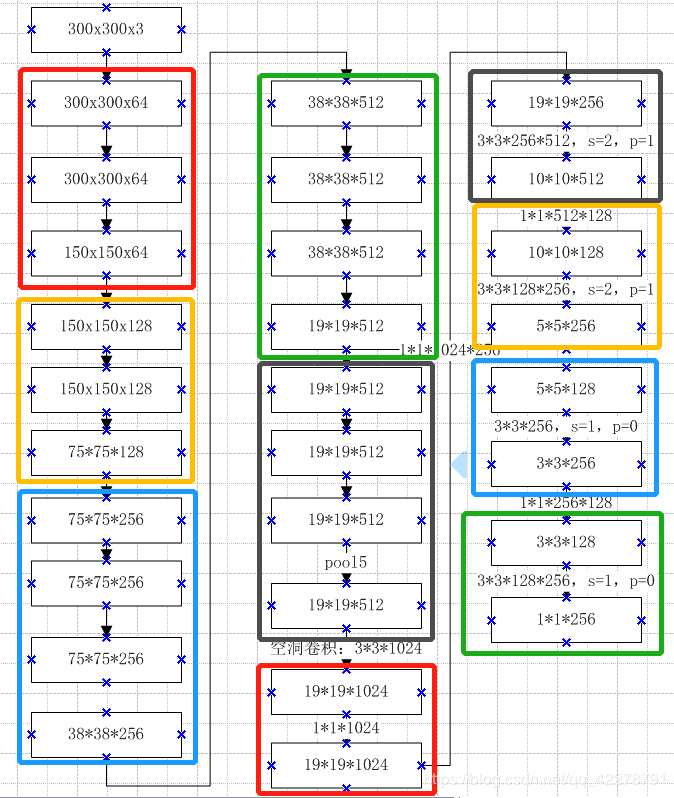
SSD的网络结构流程如下图所示:
SSD总共11个block,相比较于之前的VGG16,改变了第5个block的第4层,第6、7、8卷积层全部去掉,分别增加了红框、黑框、黄框、蓝框。
其tensorflow代码如下:
with tf.variable_scope(scope, 'ssd_300_vgg', [inputs], reuse=reuse):
# Original VGG-16 blocks.
net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1')
end_points['block1'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool1')
# Block 2.
net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2')
end_points['block2'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool2')
# Block 3.
net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3')
end_points['block3'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool3')
# Block 4.
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4')
end_points['block4'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool4')
# Block 5.
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5')
end_points['block5'] = net
#注意处
net = slim.max_pool2d(net, [3, 3], stride=1, scope='pool5') # Additional SSD blocks.
# Block 6: let's dilate the hell out of it!
#注意处
net = slim.conv2d(net, 1024, [3, 3], rate=6, scope='conv6')
end_points['block6'] = net
net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training)
# Block 7: 1x1 conv. Because the fuck.
#注意处
net = slim.conv2d(net, 1024, [1, 1], scope='conv7')
end_points['block7'] = net
net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training) # Block 8/9/10/11: 1x1 and 3x3 convolutions stride 2 (except lasts).
end_point = 'block8'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 256, [1, 1], scope='conv1x1')
#注意点:实际上相当于下面的卷积操作进行padding了
net = custom_layers.pad2d(net, pad=(1, 1))
net = slim.conv2d(net, 512, [3, 3], stride=2, scope='conv3x3', padding='VALID')
end_points[end_point] = net
end_point = 'block9'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 128, [1, 1], scope='conv1x1')
#注意点:实际上相当于下面的卷积操作进行padding了
net = custom_layers.pad2d(net, pad=(1, 1))
net = slim.conv2d(net, 256, [3, 3], stride=2, scope='conv3x3', padding='VALID')
end_points[end_point] = net
end_point = 'block10'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 128, [1, 1], scope='conv1x1')
net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID')
end_points[end_point] = net
end_point = 'block11'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 128, [1, 1], scope='conv1x1')
net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID')
end_points[end_point] = net
设计理念
参考博客:
SSD网络结构的更多相关文章
- SSD(single shot multibox detector)
SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法,截至目前是主要的检测框架之一,相比Faster RCNN有明显的速 ...
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 论文笔记 SSD: Single Shot MultiBox Detector
转载自:https://zhuanlan.zhihu.com/p/33544892 前言 目标检测近年来已经取得了很重要的进展,主流的算法主要分为两个类型(参考RefineDet):(1)two-st ...
- [目标检测]SSD原理
1 SSD基础原理 1.1 SSD网络结构 SSD使用VGG-16-Atrous作为基础网络,其中黄色部分为在VGG-16基础网络上填加的特征提取层.SSD与yolo不同之处是除了在最终特征图上做目标 ...
- 转:SSD详解
原文:http://blog.csdn.net/a8039974/article/details/77592395, http://blog.csdn.net/jesse_mx/article/det ...
- ssd原理及代码实现详解
通过https://github.com/amdegroot/ssd.pytorch,结合论文https://arxiv.org/abs/1512.02325来理解ssd. ssd由三部分组成: ba ...
- 【目标检测】SSD:
slides 讲得是相当清楚了: http://www.cs.unc.edu/~wliu/papers/ssd_eccv2016_slide.pdf 配合中文翻译来看: https://www.cnb ...
- 检测算法简介及其原理——fast R-CNN,faster R-CNN,YOLO,SSD,YOLOv2,YOLOv3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 五、SSD原理(Single Shot MultiBox Detector)
主流的算法主要分为两个类型: (1)tow-stage R-CNN系列算法,其主要思路是先通过启发式方法(selective search)或者CNN网络(RPN)产生一些列稀疏的候选框,然后对这些候 ...
随机推荐
- Ansible--02 ansible playbook的应用
目录 Ansible playbook的应用 什么是playbook playbook的组成 playbook和Ad-Hoc对比 YAML语法 安装httpd练习 rsyncd实战 实战1: 实战2: ...
- Nginx动静分离基本概述
Nginx动静分离基本概述 动静分离,通过中间将动静分离和静态请求进行分离: 通过中间件将动态请求和静态请求分离,可以建上不必要的请求消耗,同时能减少请求的延时. 通过中间件将动态请求和静态请求分离, ...
- python问答
1)什么是Python?使用Python有什么好处? Python是一种编程语言,包含对象,模块,线程,异常和自动内存管理.Python的好处在于它简单易用,可移植,可扩展,内置数据结构,并且它是一个 ...
- vue使用textare如何正确统计输入字符个数
最近vue做微信公众号的开发,使用weui的textarea输入限制字数(官网例子),并且显示.代码如下:再安卓和电脑都没有问题,但是ios输入的时候,显示字数不正确, 但是输入之后删除其中一个,就可 ...
- JQuery-跑马灯(文字无缝向上翻动-封装)
转载自他人:https://blog.csdn.net/z69183787/article/details/12857587 (function($){ $.fn.extend({ &qu ...
- 转载关于struts命名空间的一则报警
今天花了点时间把struts2警告事件彻底的测试了一边,终于有点眉目了.希望能给其他人带来一点帮助.文章属于原创.并不需要转载的时候注明出处,而是希望转载的朋友一定要看明白本文内容再转载,因为我你都清 ...
- OpenCV常用基本处理函数(8)图像变换
傅里叶变换 傅里叶变换在实际中有非常明显的物理意义,设f是一个能量有限的模拟信号,则其傅里叶变换就表示f的频谱. 图像的频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间上的梯度.如:大面积的沙 ...
- TCP练习
然后基本的socket编程,用TCP做两个进程互相发消息.C端主动发hello,S端收到后回world. #include <stdio.h> #include <stdlib.h& ...
- URAL 1057 Amount of Degrees (数位dp)
Create a code to determine the amount of integers, lying in the set [X;Y] and being a sum of exactly ...
- Android代码学习--点击事件的几种写法
由来:常规的写法参见<写一个apk>,每次点击按钮,按钮先查找文本框等元素,然后再操作,其实查找操作是很费时的操作,因此将该定义放到Activity的onCreate中:Oncreate只 ...