ROS节点理解--5
理解 ROS节点(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/)
Description: 本教程主要介绍 ROS 图(graph)概念 并讨论roscore、rosnode和 rosrun 命令行工具的使用。
1.先决条件
在本教程中我们将使用到一个轻量级的模拟器,请使用以下命令来安装:
root@zxwubuntu-Aspire-V3-572G:~# sudo apt-get install ros-<distro>-ros-tutorials
用你使用的ROS发行版本名称(例如electric、fuerte、groovy、hydro等)替换掉'<distro>'。
2.图概念概述
Nodes:节点,一个节点即为一个可执行文件,它可以通过ROS与其它节点进行通信。
Messages:消息,消息是一种ROS数据类型,用于订阅或发布到一个话题。
Topics:话题,节点可以发布消息到话题,也可以订阅话题以接收消息。
Master:节点管理器,ROS名称服务 (比如帮助节点找到彼此)。
rosout: ROS中相当于stdout/stderr。
roscore: 主机+ rosout + 参数服务器 (参数服务器会在后面介绍)。
3.节点
一个节点其实只不过是ROS程序包中的一个可执行文件。ROS节点可以使用ROS客户库与其他节点
通信。节点可以发布或接收一个话题。节点也可以提供或使用某种服务。
4.客户端库
ROS客户端库允许使用不同编程语言编写的节点之间互相通信:
- rospy = python 客户端库
- roscpp = c++ 客户端库
5.roscore
roscore 是你在运行所有ROS程序前首先要运行的命令。
root@zxwubuntu-Aspire-V3-572G:~# roscore
然后你会看到类似下面的输出信息::
... logging to ~/.ros/log/9cf88ce4-b14d-11df-8a75-00251148e8cf/roslaunch- machine_name-.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB. started roslaunch server http://machine_name:33919/
ros_comm version 1.4. SUMMARY
======== PARAMETERS
* /rosversion
* /rosdistro NODES auto-starting new master
process[master]: started with pid []
ROS_MASTER_URI=http://machine_name:11311/ setting /run_id to 9cf88ce4-b14d-11df-8a75-00251148e8cf
process[rosout-]: started with pid []
started core service [/rosout]
如果 roscore 运行后无法正常初始化,很有可能是存在网络配置问题。参见 :http://wiki.ros.org/ROS/NetworkSetup#Single_machine_configuration
如果 roscore 不能初始化并提示缺少权限,这可能是因为~/.ros文件夹
归属于root用户(只有root用户才能访问),修改该文件夹的用户归属关系:
root@zxwubuntu-Aspire-V3-572G:~# sudo chown -R <your_username> ~/.ros
6.使用rosnode
打开一个新的终端, 可以运行 rosnode list
root@zxwubuntu-Aspire-V3-572G:~# sudo rosnode list

这表示当前只有一个节点在运行: rosout。因为这个节点用于收集和记录节点调
试输出信息,所以它总是在运行的。
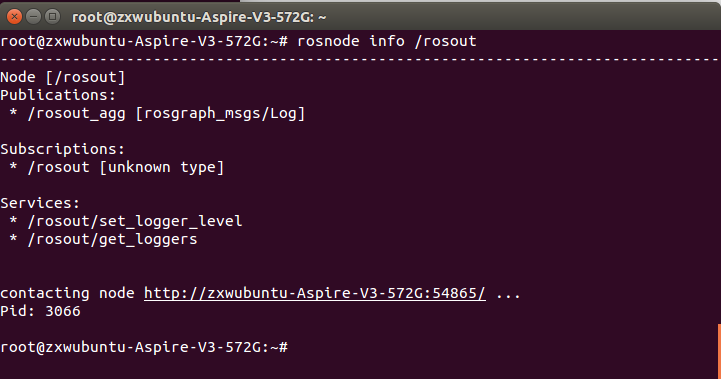
rosnode info 命令返回的是关于一个特定节点的信息。
root@zxwubuntu-Aspire-V3-572G:~# rosnode info /rosout
这给了我们更多的一些有关于rosout的信息, 例如,事实上由它发布/rosout_agg.
现在,让我们看看更多的节点。为此,我们将使用rosrun 弹出另一个节点。
7.使用 rosrun
rosrun 允许你使用包名直接运行一个包内的节点(而不需要知道这个包的路径)。
用法:
$ rosrun [package_name] [node_name]
现在我们可以运行turtlesim包中的 turtlesim_node。
然后, 在一个 新的终端:
root@zxwubuntu-Aspire-V3-572G:~# rosrun turtlesim turtlesim_node
你会看到 turtlesim 窗口:

注意: 这里的 turtle 可能和你的 turtlesim 窗口不同。别担心,这里有许多版本的turtle ,而你的是一个惊喜!
在一个 新的终端:
root@zxwubuntu-Aspire-V3-572G:~# rosnode list
你会看见类似于:

ROS的一个强大特性就是你可以通过命令行重新配置名称。
关闭 turtlesim 窗口停止运行节点 (或者回到rosrun turtlesim终端并使用`ctrl
-C`)。现在让我们重新运行它,但是这一次使用Remapping Argument改变节点名称:
root@zxwubuntu-Aspire-V3-572G:~# rosrun turtlesim turtlesim_node __name:=my_turtle
现在,我们退回使用 rosnode list:
root@zxwubuntu-Aspire-V3-572G:~# rosnode list

注意: 如果你仍看到 /turtlesim在列表中,这可能意味着你在终端中使用ctrl-C停 止节点而不是关闭窗口,或者你没有$ROS_HOSTNAME环境变量,这在
http://wiki.ros.org/ROS/NetworkSetup#Single_machine_configuration 中有定义。你可以尝试清除rosnode 列表,通过:
root@zxwubuntu-Aspire-V3-572G:~# rosnode cleanup
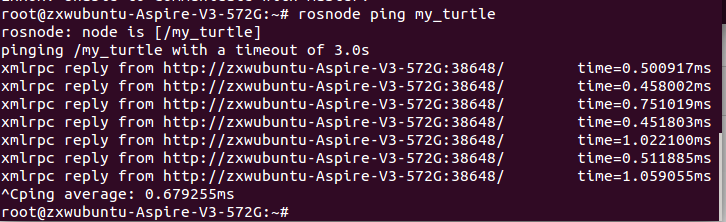
我们可以看到新的/my_turtle 节点。使用另外一个 rosnode 指令, ping,:
root@zxwubuntu-Aspire-V3-572G:~# rosnode ping my_turtle
8.回顾
本节所涉及的内容:
- roscore = ros+core : master (provides name service for ROS) + rosout (stdout/stderr) + parameter server (parameter server will be introduced later)
- rosnode = ros+node : ROS tool to get information about a node.
- rosrun = ros+run : runs a node from a given package.
到这里,您已经了解了ROS节点是如何工作的。
ROS节点理解--5的更多相关文章
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- (五)ROS节点
一. 理解ROS 节点: ROS的节点: 可以说是一个可运行的程序.当然这个程序可不简单.因为它可以接受来自ROS网络上其他可运行程序的输出信息,也可以发送信息给ROS网络,被其他 ROS 可运行程序 ...
- ROS Learning-007 beginner_Tutorials ROS节点
ROS Indigo beginner_Tutorials-06 ROS节点 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- 通过ros节点发布Twist Messages控制机器人--10
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 1.到目前为止,我们已经从命令行移动机器人,但大多数时间你将依靠一个ros节点发布适当的Twist消息. ...
- ROS学习笔记三:编写第一个ROS节点程序
在编写第一个ROS节点程序之前需要创建工作空间(workspace)和功能包(package). 1 创建工作空间(workspace) 创建一个catkin_ws: #注意:如果使用sudo一次 ...
- ros节点启动和关闭相关
Ros node启动与关闭 1. ros运行单位: Ros程序运行的单位是ros node. 2. ros 节点的启动: (1)初始化ros节点:通过调用ros::init()接口实现:可以通过参数指 ...
- ROS-4 : ROS节点和主题
依照<ROS-3 : Catkin工作空间和ROS功能包>,创建catkin工作空间,并在起src下创建功能包ros_demo_pkg,依赖项为roscpp.std_msgs.action ...
- 4.4 ROS节点名称重名
4.4 ROS节点名称重名 场景:ROS 中创建的节点是有名称的,C++初始化节点时通过API:ros::init(argc,argv,"xxxx");来定义节点名称,在Pytho ...
随机推荐
- 使用B或BL跳转时,下一条指令的地址的计算
.text .global _start 3_start: b step1 step1: ldr pc, =step2 step2: b step2 反汇编代码: : eaffffff b 0x4 : ...
- Hadoop 新 MapReduce 框架 Yarn 详解【转】
[转自:http://www.ibm.com/developerworks/cn/opensource/os-cn-hadoop-yarn/] 简介: 本文介绍了 Hadoop 自 0.23.0 版本 ...
- pyv8使用总结
在使用python爬虫的过程中,难免遇到要加载原网站的js脚本并执行.但是python本身无法解析js脚本. 不过python这么猛的语言,当然设置了很多方法来执行js脚本.其中一个比较简单的方法是使 ...
- git hook部署代码
git 提供了钩子功能,当某个操作发生时,可以执行某个动作. ftp上传时没有文件比较,虽然可以winscp提供了同步功能但是不够强大,而且文件多了,会花费比较长的时间. 1.先在主机上搭建一个git ...
- Java并发编程()阻塞队列和生产者-消费者模式
阻塞队列提供了可阻塞的put和take方法,以及支持定时的offer和poll方法.如果队列已经满了,那么put方法将阻塞直到有空间可用:如果队列为空,那么take方法将会阻塞直到有元素可用.队列可以 ...
- jackson2.1.4 序列化 通过给定Class映射 与抽象类的映射
//如果已知想要序列化的类型 可以使用TypeReference来进行处理 //List<MyBean> result = mapper.readValue(src, new TypeRe ...
- 怎样在IIS下配置PHP
首先下载Windows的PHP安装包.随后将该包解压至C:\PHP.完成上面的步骤后,将C:\php目录下的php.ini-dist文件改名为php.ini,然后拷到C:\Windows目录下. 用记 ...
- 我的开源主页Blog Lite配置指南
JinHengyu.github.io --- Blog Lite 0.1.1 好看的东西看多了就会不好看, 简单的东西永远不会难看 GitHub Pages 提供静态网站托管服务的厂商还是很多的, ...
- 标准的 C++ 由三个重要部分组成
标准的 C++ 由三个重要部分组成: 核心语言,提供了所有构件块,包括变量.数据类型和常量,等等.C++ 标准库,提供了大量的函数,用于操作文件.字符串等.标准模板库(STL),提供了大量的方法,用于 ...
- Ubuntu13.04下Eclipse中文乱码解决
参考:http://www.linuxidc.com/Linux/2011-12/50056.htm baoyu@baoyu:~$ gedit /var/lib/locales/supported.d ...