【原创】(二)Linux物理内存初始化
背景
Read the fucking source code!--By 鲁迅A picture is worth a thousand words.--By 高尔基
说明:
- Kernel版本:4.14
- ARM64处理器,Contex-A53,双核
- 使用工具:Source Insight 3.5, Visio
1. 介绍
让我们思考几个朴素的问题?
- 系统是怎么知道物理内存的?
- 在内存管理真正初始化之前,内核的代码执行需要分配内存该怎么处理?
我们先来尝试回答第一个问题,看过dts文件的同学应该见过memory的节点,以arch/arm64/boot/dts/freescale/fsl-ls208xa.dtsi为例:
memory@80000000 {
device_type = "memory";
reg = <0x00000000 0x80000000 0 0x80000000>;
/* DRAM space - 1, size : 2 GB DRAM */
};
这个节点描述了内存的起始地址及大小,事实上内核在解析dtb文件时会去读取该memory节点的内容,从而将检测到的内存注册进系统。
那么新的问题又来了?Uboot会将kernel image和dtb拷贝到内存中,并且将dtb物理地址告知kernel,kernel需要从该物理地址上读取到dtb文件并解析,才能得到最终的内存信息,dtb的物理地址需要映射到虚拟地址上才能访问,但是这个时候paging_init还没有调用,也就是说物理地址的映射还没有完成,那该怎么办呢?没错,Fixed map机制出现了。
第二个问题答案:当所有物理内存添加进系统后,在mm_init之前,系统会使用memblock模块来对内存进行管理。
开启探索之旅吧!
2. early_fixmap_init
简单来说,Fixed map指的是虚拟地址中的一段区域,在该区域中所有的线性地址是在编译阶段就确定好的,这些虚拟地址需要在boot阶段去映射到物理地址上。
来张图片看看虚拟地址空间:
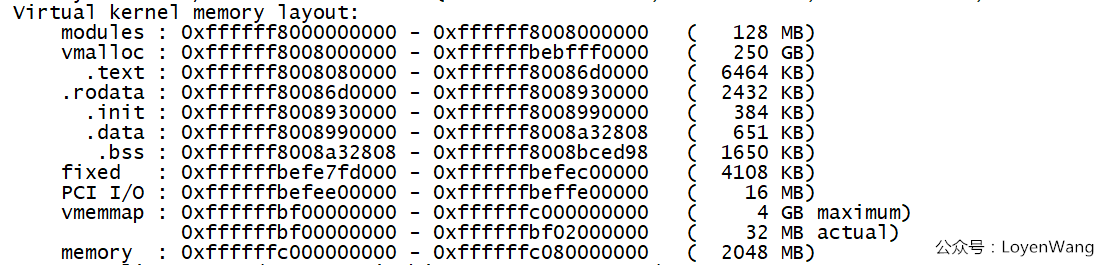
图中 fixed: 0xffffffbefe7fd000 - 0xffffffbefec00000,描述的就是Fixed map的区域。
那么这段区域中的详细一点的布局是怎样呢?看看arch/arm64/include/asm/fixmap.h中的enum fixed_address结构就清晰了,图来了:
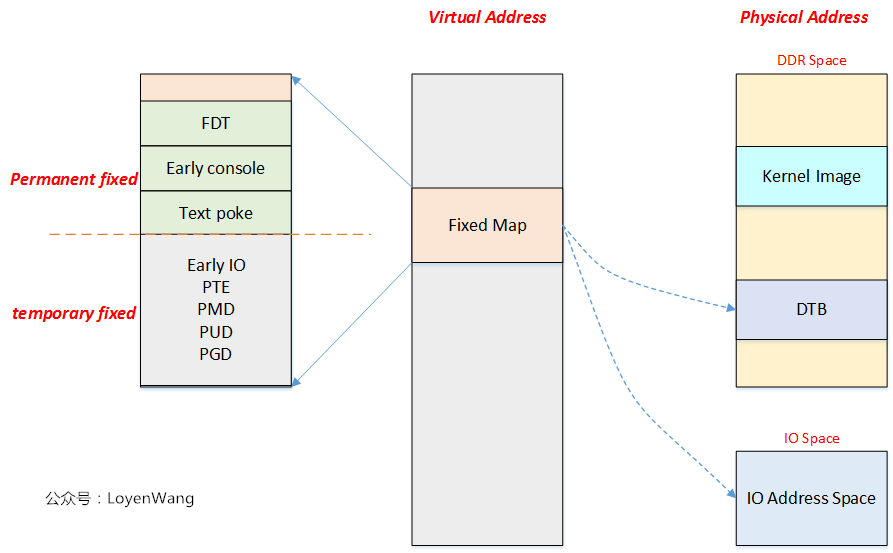
从图中可以看出,如果要访问DTB所在的物理地址,那么需要将该物理地址映射到Fixed map中的区域,然后访问该区域中的虚拟地址即可。访问IO空间也是一样的道理,下文也会讲述到。
那么来看看early_fixmap_init函数的关键代码吧:
void __init early_fixmap_init(void)
{
pgd_t *pgd;
pud_t *pud;
pmd_t *pmd;
unsigned long addr = FIXADDR_START; /* (1) */
pgd = pgd_offset_k(addr); /* (2) */
if (CONFIG_PGTABLE_LEVELS > 3 &&
!(pgd_none(*pgd) || pgd_page_paddr(*pgd) == __pa_symbol(bm_pud))) {
/*
* We only end up here if the kernel mapping and the fixmap
* share the top level pgd entry, which should only happen on
* 16k/4 levels configurations.
*/
BUG_ON(!IS_ENABLED(CONFIG_ARM64_16K_PAGES));
pud = pud_offset_kimg(pgd, addr);
} else {
if (pgd_none(*pgd))
__pgd_populate(pgd, __pa_symbol(bm_pud), PUD_TYPE_TABLE); /* (3) */
pud = fixmap_pud(addr);
}
if (pud_none(*pud))
__pud_populate(pud, __pa_symbol(bm_pmd), PMD_TYPE_TABLE); /* (4) */
pmd = fixmap_pmd(addr);
__pmd_populate(pmd, __pa_symbol(bm_pte), PMD_TYPE_TABLE); /* (5) */
......
}
关键点:
FIXADDR_START,定义了Fixed map区域的起始地址,位于arch/arm64/include/asm/fixmap.h中;pgd_offset_k(addr),获取addr地址对应pgd全局页表中的entry,而这个pgd全局页表正是swapper_pg_dir全局页表;- 将
bm_pud的物理地址写到pgd全局页目录表中; - 将
bm_pmd的物理地址写到pud页目录表中; - 将
bm_pte的物理地址写到pmd页表目录表中;
bm_pud/bm_pmd/bm_pte是三个全局数组,相当于是中间的页表,存放各级页表的entry,定义如下:
static pte_t bm_pte[PTRS_PER_PTE] __page_aligned_bss;
static pmd_t bm_pmd[PTRS_PER_PMD] __page_aligned_bss __maybe_unused;
static pud_t bm_pud[PTRS_PER_PUD] __page_aligned_bss __maybe_unused;
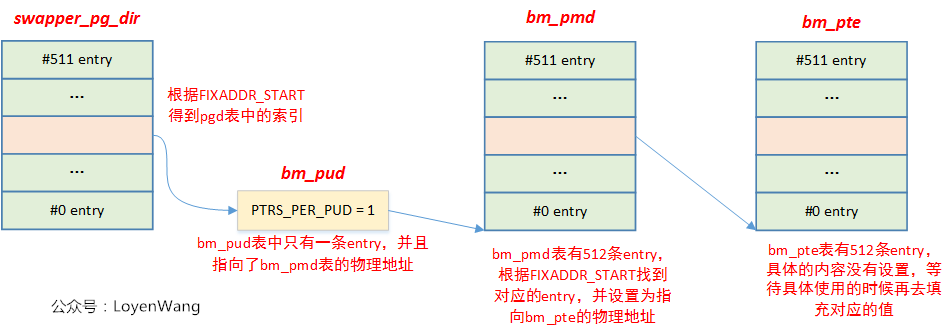
事实上,early_fixmap_init只是建立了一个映射的框架,具体的物理地址和虚拟地址的映射没有去填充,这个是由使用者具体在使用时再去填充对应的pte entry。比如像fixmap_remap_fdt()函数,就是典型的填充pte entry的过程,完成最后的一步映射,然后才能读取dtb文件。
来一张图片就懂了,是透彻的懂了:
3. early_ioremap_init
如果在boot早期需要操作IO设备的话,那么ioremap就用上场了,由于跟实际的内存管理关系不太大,不再太深入的分析。
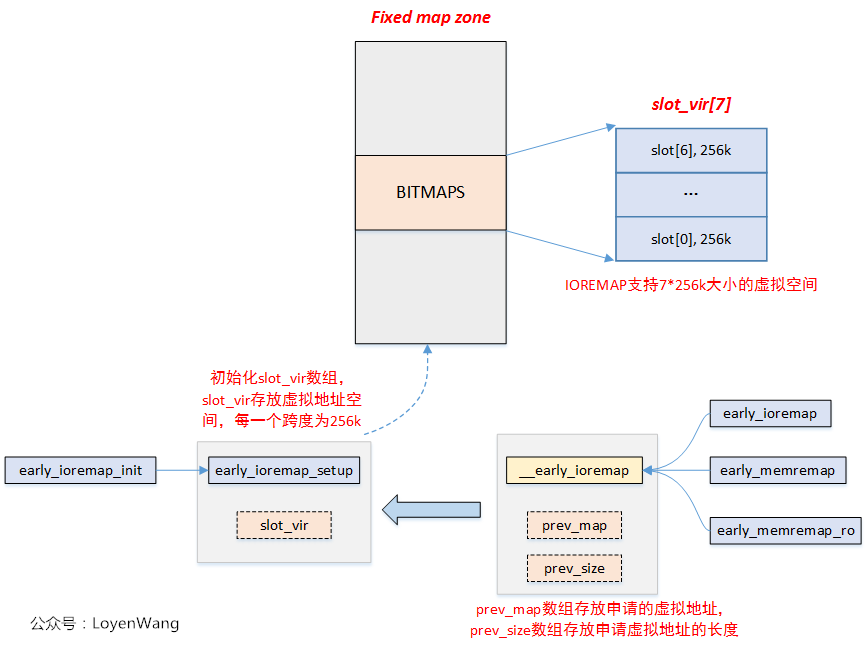
简单来说,ioremap的空间为7 * 256K的区域,保存在slot_vir[]数组中,当需要进行IO操作的时候,最终会调用到__early_ioremap函数,在该函数中去填充对应的pte entry,从而完成最终的虚拟地址和物理地址的映射。
4. memblock
上文讲的内容都只是铺垫,为了能正确访问DTB文件并且解析得到物理地址信息。从入口到最终添加的调用过程如下图:
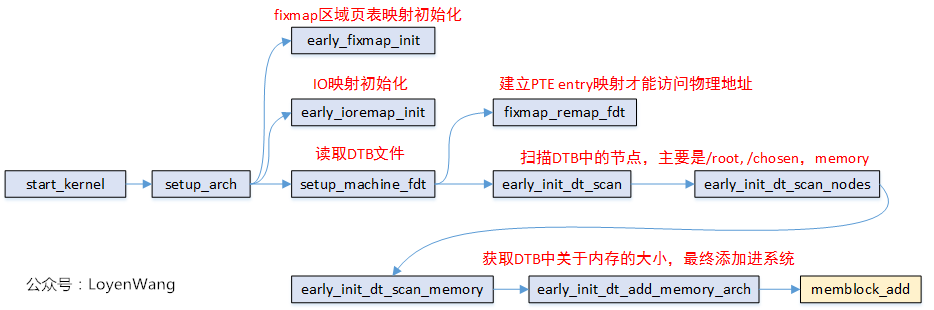
所以,这个章节的重点就是memblock模块,这个是早期的内存分配管理器,我不禁想起了之前在Nuttx中的内存池实现了,细节已然不太清晰了,但是框架性的思维都大同小异。
4.1 结构体
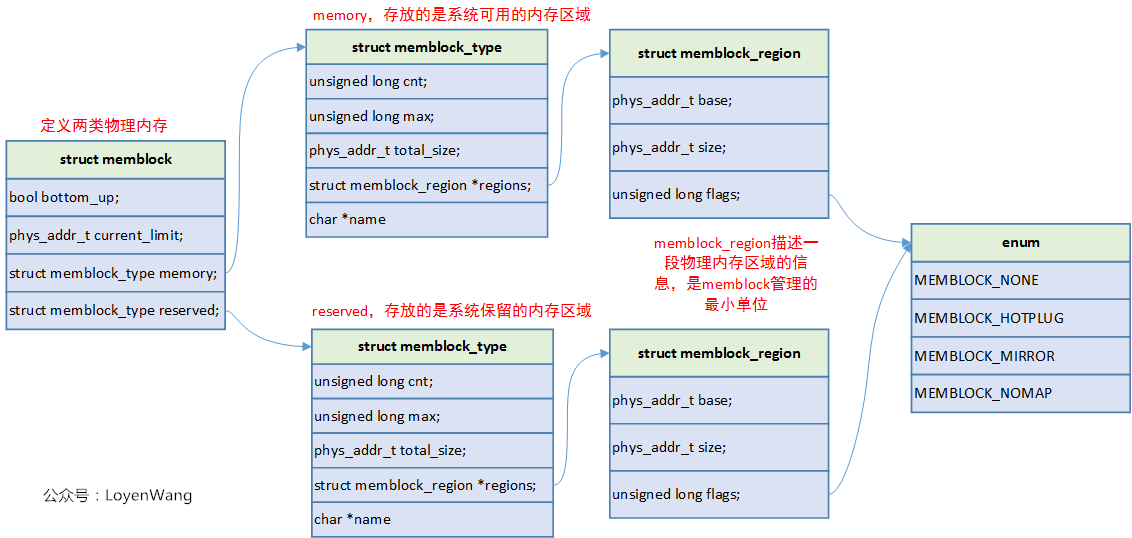
总共由三个数据结构来描述:
struct memblock定义了一个全局变量,用来维护所有的物理内存;struct memblock_type代表系统中的内存类型,包括实际使用的内存和保留的内存;struct memblock_region用来描述具体的内存区域,包含在struct memblock_type中的regions数组中,最多可以存放128个。
直接上个代码吧:
static struct memblock_region memblock_memory_init_regions[INIT_MEMBLOCK_REGIONS] __initdata_memblock;
static struct memblock_region memblock_reserved_init_regions[INIT_MEMBLOCK_REGIONS] __initdata_memblock;
#ifdef CONFIG_HAVE_MEMBLOCK_PHYS_MAP
static struct memblock_region memblock_physmem_init_regions[INIT_PHYSMEM_REGIONS] __initdata_memblock;
#endif
struct memblock memblock __initdata_memblock = {
.memory.regions = memblock_memory_init_regions,
.memory.cnt = 1, /* empty dummy entry */
.memory.max = INIT_MEMBLOCK_REGIONS,
.memory.name = "memory",
.reserved.regions = memblock_reserved_init_regions,
.reserved.cnt = 1, /* empty dummy entry */
.reserved.max = INIT_MEMBLOCK_REGIONS,
.reserved.name = "reserved",
#ifdef CONFIG_HAVE_MEMBLOCK_PHYS_MAP
.physmem.regions = memblock_physmem_init_regions,
.physmem.cnt = 1, /* empty dummy entry */
.physmem.max = INIT_PHYSMEM_REGIONS,
.physmem.name = "physmem",
#endif
.bottom_up = false,
.current_limit = MEMBLOCK_ALLOC_ANYWHERE,
};
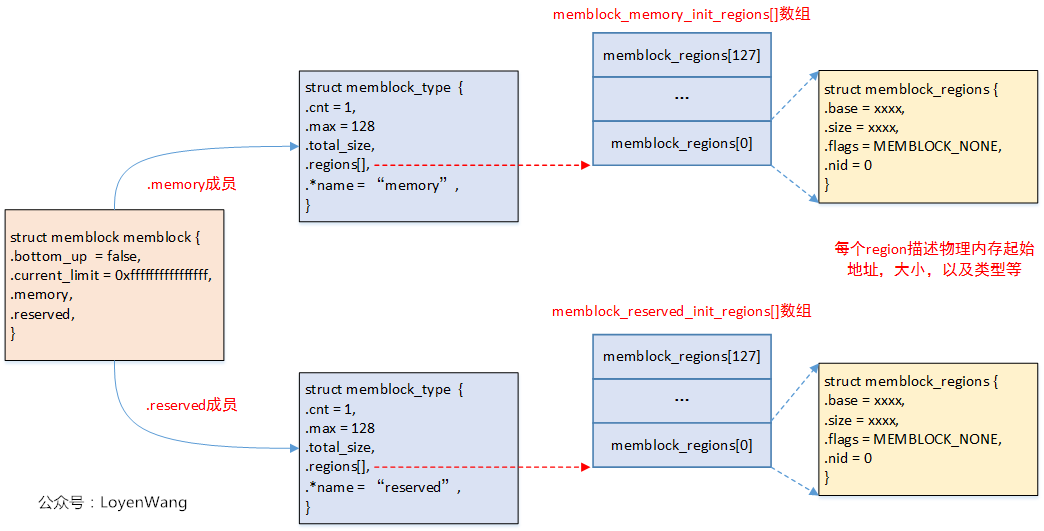
定义的memblock为全局变量,在定义的时候就进行了初始化。初始化的时候,regions指向的也是静态全局的数组,其中数组的大小为INIT_MEMBLOCK_REGIONS,也就是128个,限制了这些内存块的个数了,实际在代码中可以看到,当超过这个数值时,数组会以2倍的速度动态扩大。
初始化完了后,大体是这个样子的:
4.2 memblock_add/memblock_remove
memblock子模块,基本的逻辑都是围绕内存的添加和移除操作来展开,最终是通过调用memblock_add_range/memblock_remove_range来实现的。
memblock_add_range:
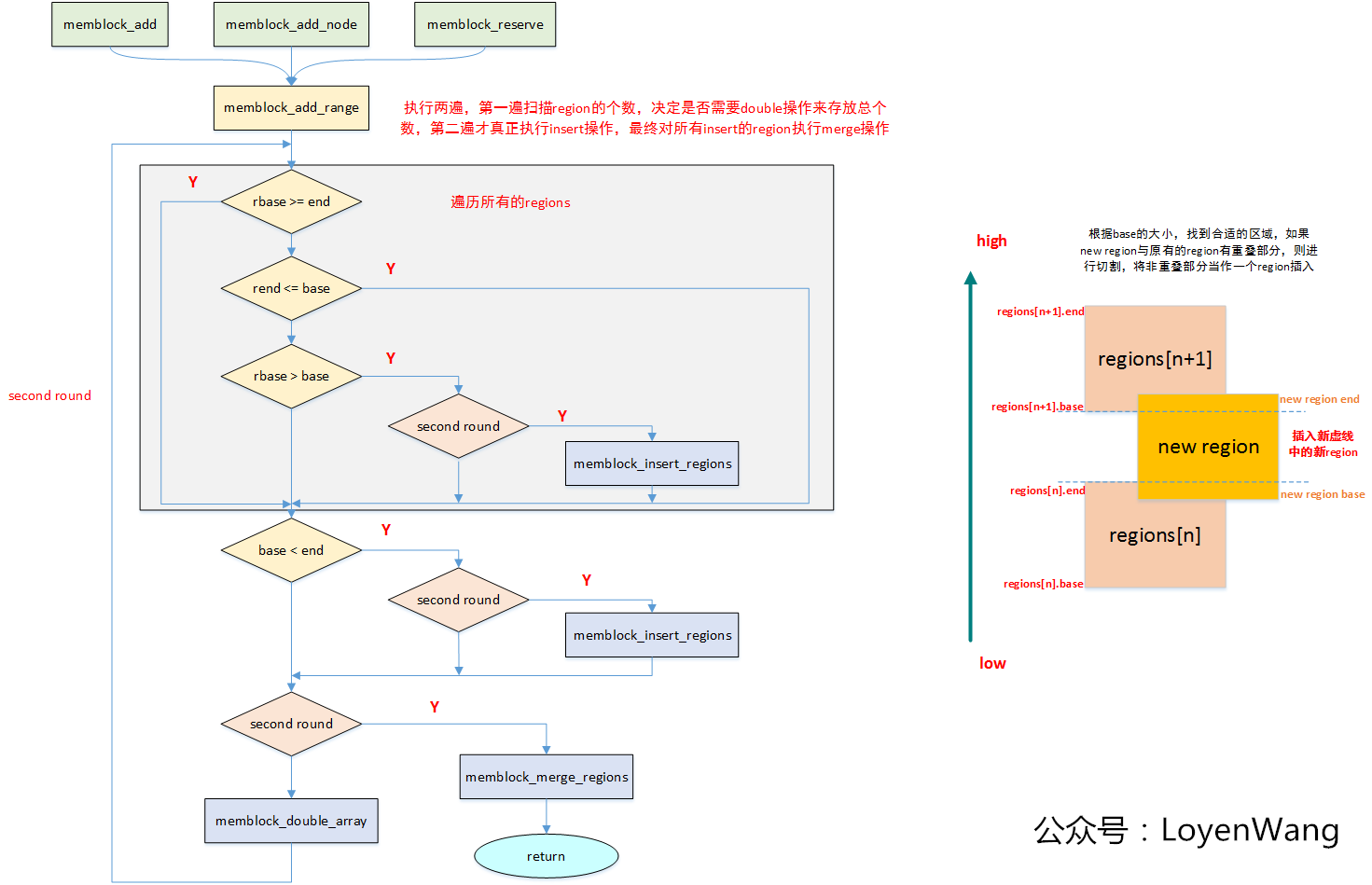
图中的左侧是函数的执行流程图,执行效果是右侧部分。右侧部分画的是一个典型的情况,实际的情况可能有多种,但是核心的逻辑都是对插入的region进行判断,如果出现了物理地址范围重叠的部分,那就进行split操作,最终对具有相同flag的region进行merge操作。
memblock_remove_range
该函数执行的一个典型case效果如下图所示:
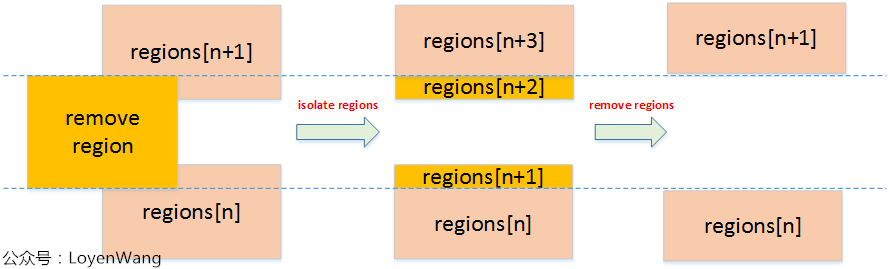
假如现在需要移除掉一片区域,而该区域跨越了多个region,则会先调用memblock_isolate_range来对这片区域进行切分,最后再调用memblock_isolate_range对区域范围内的region进行移除操作。
当调用memblock_alloc函数进行地址分配时,最后也是调用memblock_add_range来实现的,申请的这部分内存最终会添加到reserved类型中,毕竟已经分配出去了,其他人也不应该使用了。
5. arm64_memblock_init
当物理内存都添加进系统之后,arm64_memblock_init会对整个物理内存进行整理,主要的工作就是将一些特殊的区域添加进reserved内存中。函数执行完后,如下图所示:
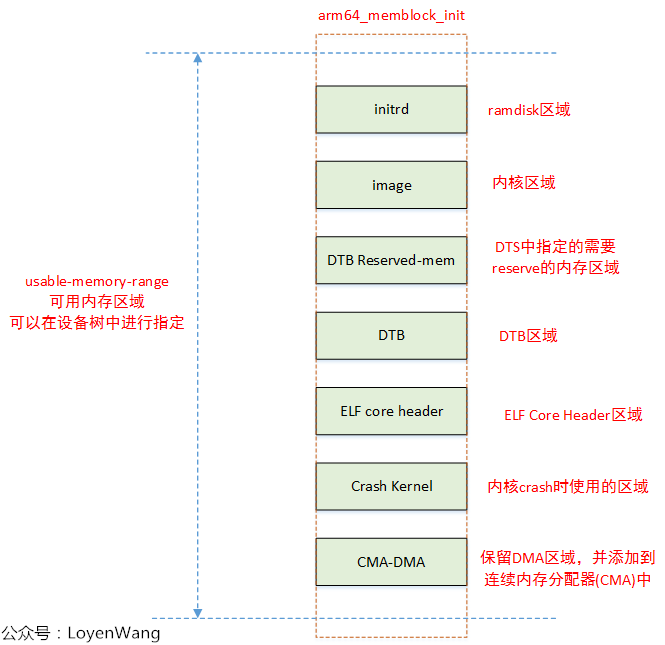
- 其中浅绿色的框表示的都是保留的内存区域, 剩下的部分就是可以实际去使用的内存了。
物理内存大体面貌就有了,后续就需要进行内存的页表映射,完成实际的物理地址到虚拟地址的映射了。
那就待续吧。

【原创】(二)Linux物理内存初始化的更多相关文章
- Linux内存管理 (1)物理内存初始化
专题:Linux内存管理专题 关键词:用户内核空间划分.Node/Zone/Page.memblock.PGD/PUD/PMD/PTE.lowmem/highmem.ZONE_DMA/ZONE_NOR ...
- linux文件系统 - 初始化(二)
加载initrd(上) 一.目的 本文主要讲述linux3.10文件系统初始化过程的第二阶段:加载initrd. initrd是一个临时文件系统,由bootload负责加载到内存中,里面包含了基本的可 ...
- 【原创】Linux中断子系统(二)-通用框架处理
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- 【原创】Linux信号量机制分析
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- linux文件系统 - 初始化(一)
术语表: struct task:进程 struct mnt_namespace:命名空间 struct mount:挂载点 struct vfsmount:挂载项 struct file:文件 st ...
- linux文件系统初始化过程(5)---加载initrd(下)
一.目的 linux把文件分为常规文件.目录文件.软链接文件.硬链接文件.特殊文件(设备文件.管道文件.socket文件等)几种类型,分别对应不同的新建函数sys_open().sys_mkdir() ...
- linux文件系统初始化过程(2)---挂载rootfs文件系统
一.目的 本文主要讲述linux3.10文件系统初始化过程的第一阶段:挂载rootfs文件系统. rootfs是基于内存的文件系统,所有操作都在内存中完成:也没有实际的存储设备,所以不需要设备驱动程序 ...
- linux文件系统初始化过程(1)---概述
术语表: struct task:进程 struct mnt_namespace:命名空间 struct mount:挂载点 struct vfsmount:挂载项 struct file:文件 st ...
- (原创)Linux下MySQL 5.5/5.6的修改字符集编码为UTF8(彻底解决中文乱码问题)
« CloudStack+XenServer详细部署方案(10):高级网络功能应用 (总结)CentOS Linux 5.x在GPT分区不能引导的解决方法 » 2013-1 11 (原创)Linux下 ...
随机推荐
- 了解下Java中的Serializable
在项目中也写了不少的JavaBean,也知道大多的JavaBean都实现了Serializable接口,也知道它的作用是序列化,序列化就是保存,反序列化就是读取.主要体现在这两方面: 1.存储.将 ...
- spring读取xml配置文件(二)
一.当spring解析完配置文件名的占位符后,就开始refresh容器 @Override public void refresh() throws BeansException, IllegalSt ...
- 脱壳系列_2_IAT加密壳_详细版_解法1_包含脚本
1 查看壳程序信息 使用ExeInfoPe 分析: 发现这个壳的类型没有被识别出来,Vc 6.0倒是识别出来了,Vc 6.0的特征是 入口函数先调用GetVersion() 2 用OD找OEP 拖进O ...
- 【iOS】Receiver type 'XXX' for instance message is a forward declaration
今天遇到这个错误.刚开始字体太大,没显示全,后来调小字体之后看到了完整提示信息: 之后就忽然想起没引入相关的类,添加 #import "RDVTabBarItem.h" 就行了.
- spring boot中的声明式事务管理及编程式事务管理
这几天在做一个功能,具体的情况是这样的: 项目中原有的几个功能模块中有数据上报的功能,现在需要在这几个功能模块的上报之后生成一条消息记录,然后入库,在写个接口供前台来拉取消息记录. 看到这个需求,首先 ...
- spring注解不支持静态变量注入
spring注解不支持静态变量注入:今天敲代码 自动配置 配置: Animal.java package study01_autoconfig.beanConfig; import org.spri ...
- springboot管理类,springboot注入类
springboot管理类,springboot注入类 定义一个配置类,添加@Configuration注解,EvaluatorTemplate代表你需要注入的第三方类 @Configuration ...
- 一份新的lilypond谱子,能设置页边距和设置换页符了
给学生做的一份乐谱,这回能设置页边距了,以及设置换页符了. 顺带能设置一些代码片段(snippet),可以用热键代替使用 设置页边距的snippet: \paper { %双引号里面填页面大小 #(s ...
- oracle 创建表空间,用户并授权
1. 查看所有表空间及存储路径 select file_name, tablespace_name from dba_data_files; 2. 创建表空间 CREATE TABLESPACE xs ...
- Windows 下安装 Python + Django
Django是Python的一个Web开发框架,以下是介绍的是windows下的安装步骤, 作者的环境是Win10 ,Windows Server 也是一样的 以下是作者整理的步骤,也可以参考官方教程 ...