s3c2440裸机-代码重定位、清bss的改进和位置无关码
1.代码重定位的改进
用ldr、str代替ldrb, strb加快代码重定位的速度。
前面重定位时,我们使用的是ldrb命令从的Nor Flash读取1字节数据,再用strb命令将1字节数据写到SDRAM里面。
我们2440开发板的Nor Flash是16位,SDRAM是32位。 假设现在需要复制16byte数据。不同的读写指令 cpu读取nor的次数 cpu写入sdram的次数 ldrb、strb 16 16 ldr、str 8 4 可以看出我们更换读写指令后读写次数变少了,提升了cpu的访问效率。
修改后的start.s代码如下图所示,这里我只简单的列出了重定位的实现:
...
cpy:
ldr r4, [r1]
str r4, [r2]
add r1, r1, #4 //r1加4
add r2, r2, #4 //r2加4
cmp r2, r3 //如果r2 =< r3继续拷贝
ble cpy
...
用c语言实现重定位
添加如下链接脚本:
SECTIONS
{
. = 0x30000000;
__code_start = .;
. = ALIGN(4);
.text :
{
*(.text)
}
. = ALIGN(4);
.rodata : { *(.rodata) }
. = ALIGN(4);
.data : { *(.data) }
. = ALIGN(4);
__bss_start = .;
.bss : { *(.bss) *(.COMMON) }
_end = .;
}
在main.c中添加如下函数实现:
void copy2sdram(void)
{
//要从lds文件中获得 __code_start, __bss_start
//然后从0地址把数据复制到__code_start
extern int __code_start, __bss_start;
volatile unsigned int *dest = (volatile unsigned int *)&__code_start;
volatile unsigned int *end = (volatile unsigned int *)&__bss_start;
volatile unsigned int *src = (volatile unsigned int *)0;
while (dest < end)
{
*dest++ = *src++; //从0地址依次copy到__code_start(代码段的运行地址)
}
}
然后在start.s中设置栈指针sp后,即可执行bl copy2sdram进行重定位代码。如何设置栈指针请参考
时钟编程(二、配置时钟寄存器)中有实现,重复代码我就不贴上来了。
2.清bss的改进
用ldr、str代替ldrb, strb加快清bss的速度
和上面重定位类似,代码如下:
ldr r1, =__bss_start
ldr r2, =_end
mov r3, #0
clean:
str r3, [r1]
add r1, r1, #4
cmp r1, r2
ble clean bl main
halt:
b halt
c语言实现清bss
和上面重定位的代码实现一样,就是往bss段全部写0. 执行完bl copy2sdram, 然后再bl clean_bss即可完成清除bss段。
void clean_bss(void)
{
/* 从lds文件中获得 __bss_start, _end*/
extern int _end, __bss_start; volatile unsigned int *start = (volatile unsigned int *)&__bss_start;
volatile unsigned int *end = (volatile unsigned int *)&_end; while (start <= end)
{
*start++ = 0;
}
}
注意:汇编代码获取的是链接脚本中的变量的地址,而C语言代码中获取的是链接脚本中的变量的值,所以这里的用C语言改进重定位还是清bss都是要加取址符。
保证所有段的起始地址以4字节对齐
我们前面为了加快重定位和清bss的速度,用到了ldr,str这样以4字节为单位进行读写,但是还可能导致一个问题,假设现在链接脚本没有进行用ALIGN(4)让不同的段以4字节对齐,那么就会出现访问错乱的情况。
我举个例子:
#include "s3c2440_soc.h"
#include "uart.h"
#include "init.h" char g_Char = 'A'; //.data
char g_Char3 = 'a';
const char g_Char2 = 'B'; //.rodata
int g_A = 0; //bss
int g_B; //bss int main(void)
{
uart0_init(); puts("\n\rg_A = ");
printHex(g_A);
puts("\n\r");
putchar(g_Char);
return 0;
}
将链接脚本中.data段和.bss之间的ALIGN(4)去掉。那么我们会发现程序执行的时候输出的g_A=0,为什么呢,我们明明初始化g_A=‘A’呀?
我们分析下反汇编看看:
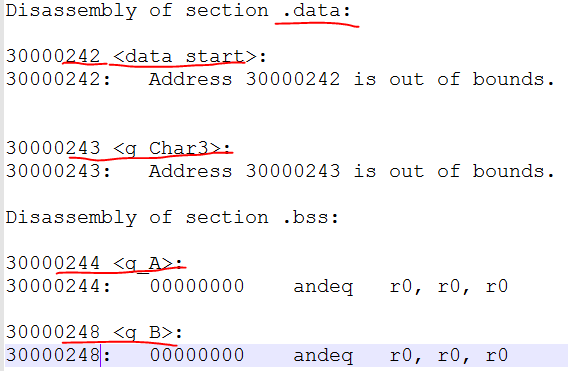
我们的.bss段紧接着.data段后面,可知在对bss段进行清除的时候,由于我们是以4字节为单位操作的,所以我们清除g_A的时候,连带g_Char,g_Char的值也一起清除了。所以data段和数据段之间添加ALIGN(4)。修改后就会发现bss段的地址以0x30000248开始了,如下图:

3.位置无关码
我们对‘bl sdram_init’指令进行分析:
查看反汇编:(代码段的链接地址为0x3000,0000)

这里的bl 3000036c不是跳转到3000036c,这个时候sdram并未初始化,那么这个物理地址是无法访问的;
为了验证,我们做另一个实验,修改连接脚本sdram.lds, 链接地址改为0x3000,0800,编译,查看反汇编:
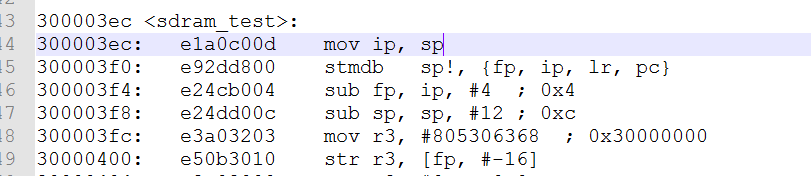
可以看到现在变成了bl 300003ec,但两个的机器码e1a0c00d都是一样的,机器码一样,执行的内容肯定都是一样的。 因此这里并不是跳转到显示的地址,而是跳转到: pc + offset,这个由链接器决定。
假设程序从0x30000000执行,当前指令地址:0x3000005c ,那么就是跳到0x3000036c;如果程序从0运行,当前指令地址:0x5c 调到:0x000003ec
跳转到某个地址并不是由bl指令所决定,而是由当前pc值决定。反汇编显示这个值只是为了方便读代码。
重点: 反汇编文件里, B或BL 某个值,只是起到方便查看的作用,并不是真的跳转。
怎么写位置无关码?
使用相对跳转命令 b或bl;
重定位之前,不可使用绝对地址,不可访问全局变量/静态变量,也不可访问有初始值的数组(因为初始值放在rodata里,使用绝对地址来访问);
重定位之后,使用ldr pc = xxx,跳转到/runtime地址;
写位置无关码,其实就是不使用绝对地址,判断有没有使用绝对地址,除了前面的几个规则,最根本的办法看反汇编。
因此,前面的例子程序使用bl命令相对跳转,程序仍在NOR/sram执行,要想让main函数在SDRAM执行,需要修改代码:
//bl main /*bl相对跳转,程序仍在NOR/sram执行*/
ldr pc, =main/*绝对跳转,跳到SDRAM*/
s3c2440裸机-代码重定位、清bss的改进和位置无关码的更多相关文章
- s3c2440裸机-代码重定位(1.重定位的引入,为什么要代码重定位)
1.重定位的引入(为什么要代码重定位) 我们知道s3c2440的cpu从0地址开始取指令执行,当从nor启动时,0地址对应nor,nor可以像内存一样读,但不能像内存一样写.我们能够从nor上取指令执 ...
- s3c2440裸机-代码重定位(2.编程实现代码重定位)
代码重定位(2.编程实现代码重定位) 1.引入链接脚本 我们上一节讲述了为什么要重定位代码,那么怎么去重定位代码呢? 上一节我们发现"arm-linux-ld -Ttext 0 -Tdata ...
- S3C2440—10.代码重定位
文章目录 一.启动方式 1.1 NAND FLASH 启动 1.2 NOR FLASH 启动 二. 段的概念 2.1 重定位数据段 2.2 加载地址的引出 三.链接脚本 3.1 链接脚本的引入 3.2 ...
- uboot 与 代码重定位
ref: https://blog.csdn.net/dhauwd/article/details/78566668 https://blog.csdn.net/yueqian_scut/articl ...
- 代码重定位和位置无关码——运行于nor flash
通过前面的学习,我们知道,把可执行程序从一个位置复制到另一个位置的过程叫做重定位. 现在有两种方式,第一种是只重定位data段到内存(sdram),为什么需要重定位?因为有些flash的写操作,不是简 ...
- s3c6410_uboot中的代码重定位(nand->sdram)
本文仅探讨s3c6410从nand flash启动u-boot时的代码重定位过程 参考: 1)<USER'S MANUAL-S3C6410X>第二章 MEMORY MAP 第八章 NAND ...
- linux上使用J-Link调试S3C2440裸机代码
linux上使用J-Link调试S3C2440裸机代码 工具: segger的jlink仿真器 segger的jlink for linux 交叉编译工具链里面的arm-xx-linux-xx-gdb ...
- Linux从头学06:16张结构图,彻底理解【代码重定位】的底层原理
作 者:道哥,10+年的嵌入式开发老兵. 公众号:[IOT物联网小镇],专注于:C/C++.Linux操作系统.应用程序设计.物联网.单片机和嵌入式开发等领域. 公众号回复[书籍],获取 Linux. ...
- s3c2440代码重定位和段的引入——学以致用,综合Makefile的锻炼
对于2440而言,nand启动,nand的前4k内容由硬件复制到sram. nor flash,可以像内存一样读,但是不能像内存一样写,执行写操作需要特殊的操作. 程序中包含有需要写的全局或者静态变量 ...
随机推荐
- cs5642 v3摄像头拍照效果
4个摄像头拍照效果 配置的是ov5642_960p_RAW 测试图片分别如下:
- springboot自动装配(3)---条件注解@Conditional
之前有说到springboot自动装配的时候,都是去寻找一个XXXAutoConfiguration的配置类,然而我们的springboot的spring.factories文件中有各种组件的自动装配 ...
- iview可收缩侧边菜单实现(支持二级菜单)
想用iview做一个可以伸缩的侧边菜单栏,效果如下: 1.侧边栏收缩前:可以通过点击菜单分类展开子菜单项: 2.可以让用户点击图标动态收缩菜单栏: 3.侧边栏收缩后:只显示菜单分类的图标,鼠标放置在菜 ...
- WinForm WebBrowser 设置cookie
[DllImport("wininet.dll", CharSet = CharSet.Auto, SetLastError = true)] public static exte ...
- 转载 全角字符unicode码对应表
http://www.mytju.com/classcode/tools/encode_utf8.asp 对应关系查询网站 Uni. GB Uni. GB Uni. GB Uni. GB Uni. G ...
- jquery实现商品sku多属性选择(商品详情页)
转载于https://blog.csdn.net/csdn924618338/article/details/51455595 实现效果 源码 <!DOCTYPE HTML> <ht ...
- Maven——向Maven本地仓库中手动添加依赖包(ps:ojdbc.jar)
maven中央仓库中并非包含所有现有的依赖包和插件,部分依赖包和插件需要手动地进行添加(如ojdbc.jar) 一.添加JDK系统环境变量(maven是基于Java的,可参考:https://www. ...
- filezilla无法登陆ubuntu虚拟机
一般情况下,是新安装的虚拟机没有安装ssh造成的 进入虚拟机控制台,输入 sudo apt-get openssh-server 回车 等安装完成即可登陆.
- SVN清理失败(clean up)或者(lock)问题进入死循环最终解决方案
解决方法: step1: 到 sqlite官网 (http://www.sqlite.org/download.html) 下载 sqlite3.exe step2: 将下载到的 sqlite3.ex ...
- React劲爆新特性Hooks 重构去哪儿网火车票PWA
React劲爆新特性Hooks 重构去哪儿网火车票PWA 获取课程资料链接:点击这里获取 本课程先带你细数最近一年来React的新特性,如Hooks.Redux API,让你从头理解Hooks对传统R ...