Linux内核驱动学习(八)GPIO驱动模拟输出PWM
前言
上一篇的学习中介绍了如何在用户空间直接操作GPIO,并写了一个脚本可以产生PWM。本篇的学习会将写一个驱动操作GPIO,同样的也可以发生PWM,因此这里还需要部分的硬件配合,需要一块开发板,当然可能还需要一台示波器。
原理图
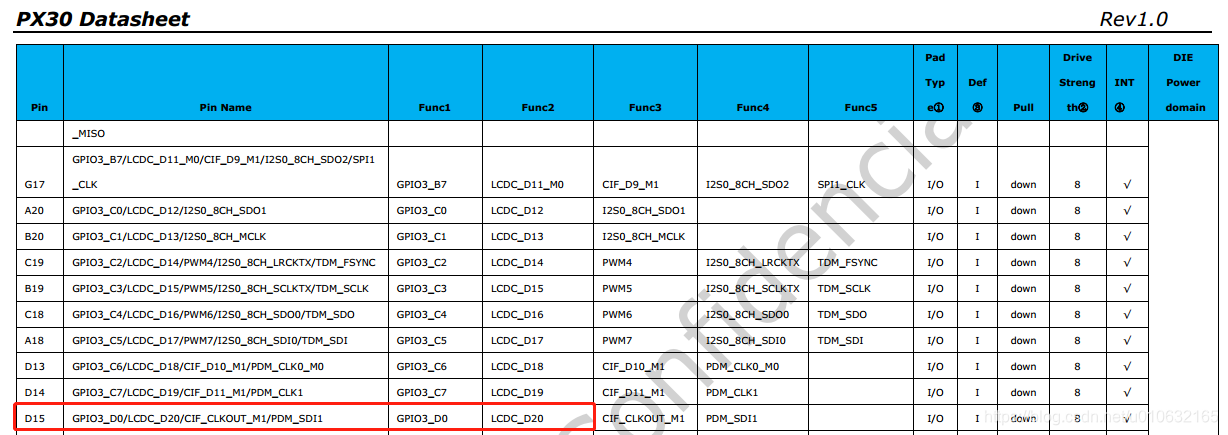
和上一篇相同,引脚依然是GPIO3_D0,具体硬件肯定会不同,注意参考soc的datasheet和硬件原理图,先定位正确需要操作的GPIO。
IO模拟输出PWM
这里驱动实现的方式是先创建一个内核线程,如何创建内核线程可以参考Linux内核驱动学习(五)KThread学习总结,然后在线程函数一直循环反转IO口的输出。这里的目的单纯是为了学习操作GPIO,不建议项目中通过这种IO口模拟的方式去实现PWM的输出,而应该直接使用自带PWM功能的引脚。
设备树
gpio-demo {
compatible = "gpio-demo";
gpios = <&gpio3 0 GPIO_ACTIVE_LOW>;
};
驱动源码中通过of_get_gpio接口去解析gpio。
驱动端
驱动源码中of_device_id结构体变量中的成员.compatible的值必须和设备树的设备节点兼容属性compatible的值相同;
static struct of_device_id gpio_demo_of_match[] = {
{ .compatible = "gpio-demo"},
{},
}
MODULE_DEVICE_TABLE(of,gpio_demo_of_match);
static struct platform_driver gpio_demo_driver = {
.probe = gpio_demo_probe,
.driver = {
.name = "gpio-demo-device",
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(gpio_demo_of_match),
}
};
在probe函数实现对设备树节点的解析,of_get_gpio对应gpio-demo节点下的gpios属性;
然后ret = devm_gpio_request_one(dev, gpio, GPIOF_DIR_OUT, pdev->name)语句初始化GPIO为输出引脚;
static int gpio_demo_probe(struct platform_device *pdev){
int ret,i;
struct device *dev = &pdev->dev;
struct device_node *node = dev->of_node;
if (!node)
return -EINVAL;
ret = of_gpio_count(node);
if (ret == 0){
return -EINVAL;
}
priv = devm_kzalloc(dev, sizeof(*priv) + sizeof(int) * ret, GFP_KERNEL);
if (!priv){
return -ENOMEM;
}
priv->count = ret;
mutex_init(&priv->mtx);
for (i = 0; i < priv->count; i++) {
unsigned int gpio;
gpio = of_get_gpio(node, i);
if (gpio < 0) {
dev_warn(dev, "Unable to get gpio #%d\n", i);
continue;
}
ret = devm_gpio_request_one(dev, gpio, GPIOF_DIR_OUT, pdev->name);
priv->gpio[i] = gpio;
if (ret < 0) {
dev_warn(dev, "Unable to re quest GPIO %d: %d\n",
gpio, ret);
continue;
}
printk(KERN_INFO "success request gpio %d\n",gpio);
gpio_direction_output(gpio, 1); //设置输出的电平
}
return 0;
}
线程执行函数中通过gpio_set_value设置GPIO的输出值,然后休眠50毫秒,最终PWM的周期应该是100毫秒左右。
static int thread_func(void *data) {
int i, count;
while (1){
count++;
mutex_lock(&priv->mtx);
for ( i = 0; i < priv->count; i++){
gpio_set_value(priv->gpio[i], count%2);
}
mutex_unlock(&priv->mtx);
msleep(50);
printk(KERN_INFO "thread count %d\n", count);
}
return 0;
}
gpio_set_value和gpio_direction_output的区别
如果使用该GPIO时,不会动态地切换输入输出,建议在开始时就设置好GPIO 输出方向,后面拉高拉低时使用gpio_set_value()接口,而不建议使用gpio_direction_output(), 因为gpio_direction_output接口里面有mutex锁,对中断上下文调用会有错误异常,且相比gpio_set_value,gpio_direction_output所做事情更多,浪费。
调试信息
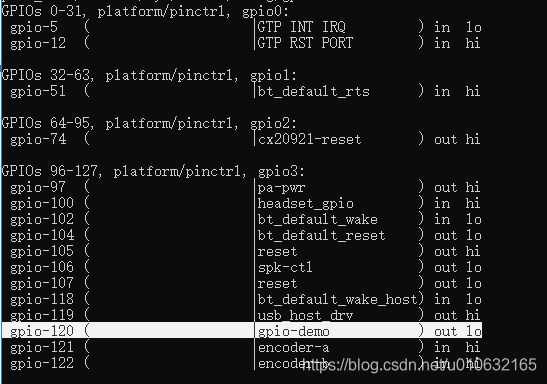
先通过debugfs查看相应的GPIO已经成功加载到内核了;但是我们目前没有留用户层调用的接口,这个有悖于我们的初衷,但是目前为止已经实现了自己想要的效果。
实验结果

附录
#include <linux/module.h>
#include <linux/init.h>
#include <linux/platform_device.h>
//API for libgpio
#include <linux/gpio.h>
//API for malloc
#include <linux/slab.h>
//API for device tree
#include <linux/of_platform.h>
#include <linux/of_gpio.h>
#include <linux/of_device.h>
//API for thread
#include <linux/kthread.h>
#include <linux/delay.h>
#include <linux/mutex.h>
static struct task_struct *thread_body;
struct gpio_demo_priv{
int count;
int gpio[0];
struct mutex mtx;
int mode;
};
struct gpio_demo_priv *priv;
static int thread_func(void *data) {
int i, count;
while (1){
count++;
mutex_lock(&priv->mtx);
for ( i = 0; i < priv->count; i++){
gpio_set_value(priv->gpio[i], count%2);
}
mutex_unlock(&priv->mtx);
msleep(50);
printk(KERN_INFO "thread count %d\n", count);
}
return 0;
}
static int gpio_demo_probe(struct platform_device *pdev){
int ret,i;
struct device *dev = &pdev->dev;
struct device_node *node = dev->of_node;
if (!node)
return -EINVAL;
ret = of_gpio_count(node);
if (ret == 0){
return -EINVAL;
}
priv = devm_kzalloc(dev, sizeof(*priv) + sizeof(int) * ret, GFP_KERNEL);
if (!priv){
return -ENOMEM;
}
priv->count = ret;
mutex_init(&priv->mtx);
for (i = 0; i < priv->count; i++) {
unsigned int gpio;
gpio = of_get_gpio(node, i);
if (gpio < 0) {
dev_warn(dev, "Unable to get gpio #%d\n", i);
continue;
}
ret = devm_gpio_request_one(dev, gpio, GPIOF_DIR_OUT, pdev->name);
priv->gpio[i] = gpio;
if (ret < 0) {
dev_warn(dev, "Unable to re quest GPIO %d: %d\n",
gpio, ret);
continue;
}
printk(KERN_INFO "success request gpio %d\n",gpio);
gpio_direction_output(gpio, 1); //设置输出的电平
}
platform_set_drvdata(pdev,priv);
thread_body = kthread_create(thread_func, NULL, "thread_pwm");
if((thread_body))
{
wake_up_process(thread_body);
}
return 0;
}
static struct of_device_id gpio_demo_of_match[] = {
{ .compatible = "gpio-demo"},
{},
}
MODULE_DEVICE_TABLE(of,gpio_demo_of_match);
static struct platform_driver gpio_demo_driver = {
.probe = gpio_demo_probe,
.driver = {
.name = "gpio-demo-device",
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(gpio_demo_of_match),
}
};
static int __init gpio_demo_init(void){
return platform_driver_register(&gpio_demo_driver);
}
static void __exit gpio_demo_exit(void){
platform_driver_unregister(&gpio_demo_driver);
}
late_initcall(gpio_demo_init);
module_exit(gpio_demo_exit);
MODULE_LICENSE("GPL");
MODULE_DESCRIPTION("Gpio demo Driver");
MODULE_ALIAS("platform:gpio-demo");
Linux内核驱动学习(八)GPIO驱动模拟输出PWM的更多相关文章
- LINUX内核分析第八周学习总结——进程的切换和系统的一般执行过程
LINUX内核分析第八周学习总结——进程的切换和系统的一般执行过程 张忻(原创作品转载请注明出处) <Linux内核分析>MOOC课程http://mooc.study.163.com/c ...
- LINUX内核分析第八周学习总结
LINUX内核分析第八周学习总结 标签(空格分隔): 20135328陈都 陈都 原创作品转载请注明出处 <Linux内核分析>MOOC课程 http://mooc.study.163.c ...
- Linux 内核分析第八周学习笔记
Linux 内核分析第八周学习笔记 zl + 原创作品转载请注明出处 + <Linux内核分析>MOOC课程http://mooc.study.163.com/course/USTC-10 ...
- Linux 内核协议栈 学习资料
终极资料 1.<Understanding Linux Network Internals> 2.<TCP/IP Architecture, Design and Implement ...
- Linux内核设计第八周 ——进程的切换和系统的一般执行过程
Linux内核设计第八周 ——进程的切换和系统的一般执行过程 第一部分 知识点总结 第二部分 实验部分 1.配置实验环境,确保menu内核可以正常启动 2.进入gdb调试,在shedule和conte ...
- Linux内核分析第八周——进程的切换和系统的一般执行过程
Linux内核分析第八周--进程的切换和系统的一般执行过程 李雪琦+原创作品转载请注明出处 + <Linux内核分析>MOOC课程http://mooc.study.163.com/cou ...
- Linux 内核list_head 学习
Linux 内核list_head 学习(一) http://www.cnblogs.com/zhuyp1015/archive/2012/06/02/2532240.html 在Linux内核中,提 ...
- Linux内核调用SPI平台级驱动_实现OLED的显示功能
Linux内核调用SPI驱动_实现OLED显示功能 0. 导语 进入Linux的世界,发现真的是无比的有趣,也发现搞Linux驱动从底层嵌入式搞起真的是很有益处.我们在单片机.DSP这些无操作系统的裸 ...
- LINUX内核分析第八周学习总结:进程的切换和系统的一般执行过程
韩玉琪 + 原创作品转载请注明出处 + <Linux内核分析>MOOC课程http://mooc.study.163.com/course/USTC-1000029000 一.进程切换的关 ...
- Linux内核分析——第八周学习笔记
实验作业:进程调度时机跟踪分析进程调度与进程切换的过程 20135313吴子怡.北京电子科技学院 [第一部分]理解Linux系统中进程调度的时机 1.Linux的调度程序是一个叫schedule()的 ...
随机推荐
- NK16
C 小石的海岛之旅 链接:https://ac.nowcoder.com/acm/contest/949/C来源:牛客网 暑假到了,小石和小雨到海岛上玩. 从水平方向看海岛可以看成 nnn个小块,每一 ...
- Spring5:IOC注解
使用注解须知: 1:导入约束:导入context的命名空间 2:配置注解的支持:<context:annotation-config/> <?xml version="1. ...
- tensorflow1.0 构建神经网络做图片分类
import tensorflow as tf from tensorflow.examples.tutorials.mnist import input_data mnist = input_dat ...
- Jmeter与LoadRunner的比较
一.与Loadrunner的比较相似点 1.Jmeter的架构跟loadrunner原理一样, 都是通过中间代理,监控&收集并发客户端发现的指令,把他们生成脚本,再发送到应用服务器,再监控服务 ...
- 吕建文 20199303《Linux内核原理与分析》第十二周作业
ShellShock攻击实验 2014年9月24日,Bash中发现了一个严重漏洞shellshock,该漏洞可用于许多系统,并且既可以远程也可以在本地触发.在本实验中,学生需要亲手重现攻击来理解该漏洞 ...
- 用百度AI平台接口实现OCR文字识别
目录 一.接入指南 1.注册 2.登录 3.创建应用 二.安装接口模型 三.编写python代码 四.识别结果 一.接入指南 若想利用百度AI开放平台进行软件开发,首先应成为百度AI开放平台的开发者. ...
- C51_PID 水温控制系统
C51_PID 水温控制系统 51CPIDUART水温控制 前言 通过C语言程序写入51单片机实现水的温度的采集,并通过控制器控制加热器给水体加热,对水体的温进行PID控制,保证温度在设定值范围内波动 ...
- GithubAction-Deploy
GithubAction-Deploy githubhexoaction 使用 github action 自动化部署 创建GitHub repository 存放源文件 在repo设置界面里添加Se ...
- 小猪的Python学习之旅 —— 16.再尝Python数据分析:采集拉勾网数据分析Android就业行情...
一句话概括本文: 爬取拉钩Android职位相关数据,利用numpy,pandas和matplotlib对招人公司 情况和招聘要求进行数据分析. 引言: 在写完上一篇<浅尝Python数据分析: ...
- 最小生成树之prime算法
public class Prime { public static void main(String[] args) { //路径矩阵 int arcs[][] = {{-1,6,1,5,-1,-1 ...