(转载)利用SIFT和RANSAC算法(openCV框架)实现物体的检测与定位,并求出变换矩阵(findFundamentalMat和findHomography的比较) 置顶
原文链接:https://blog.csdn.net/qq_25352981/article/details/46914837#commentsedit
本文目标是通过使用SIFT和RANSAC算法,完成特征点的正确匹配,并求出变换矩阵,通过变换矩阵计算出要识别物体的边界(文章中有部分源码,整个工程我也上传了,请点击这里)。
SIFT算法是目前公认的效果最好的特征点检测算法,关于该算法的就不多说了,网上的资料有很多,在此提供两个链接,一个是SIFT原文的译文,一个是关于SIFT算法的详细解释:
整个实现过程可以复述如下:提供两张初始图片,一幅为模板图像,一幅为测试图片,目的就是根据模板图片中的物体,检测出测试图片中的物体,并表示出物体的具体位置和大小,测试图片中的物体位置和大小,已经事先用白色方框标记。
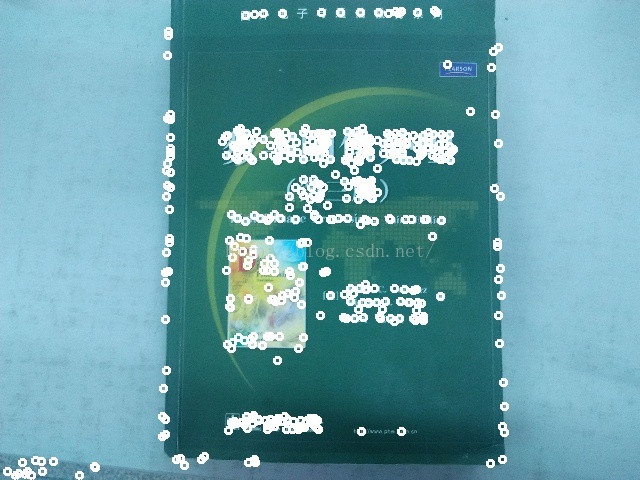
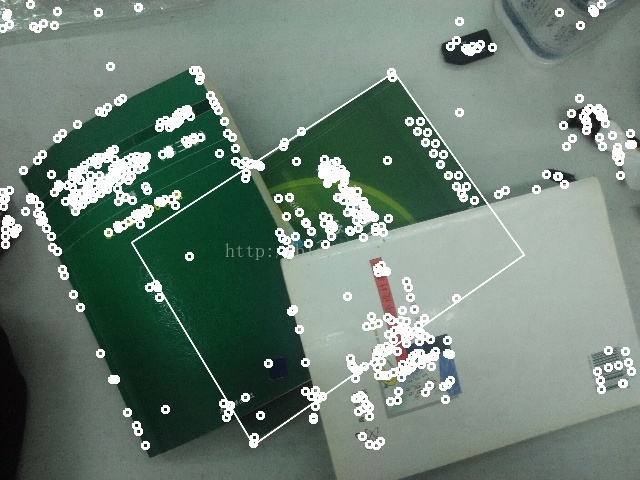
首先,对两幅图片,都使用SIFT算法提取特征点,提取结果如下:(SIFT特征提取方法就用的是上文链接“SIFT算法详解”中提供的代码)
然后对特征点进行匹配,按照SIFT算法原文作者的思路,每个特征点产生一个128维的向量,计算向量之间的欧式距离,采用最近比次近的方式完成匹配,如果最近距离比上次近距离小于0.8,则认为这是一个正确的匹配, 否则认为匹配不成功。结果这种匹配后的情况如下图:
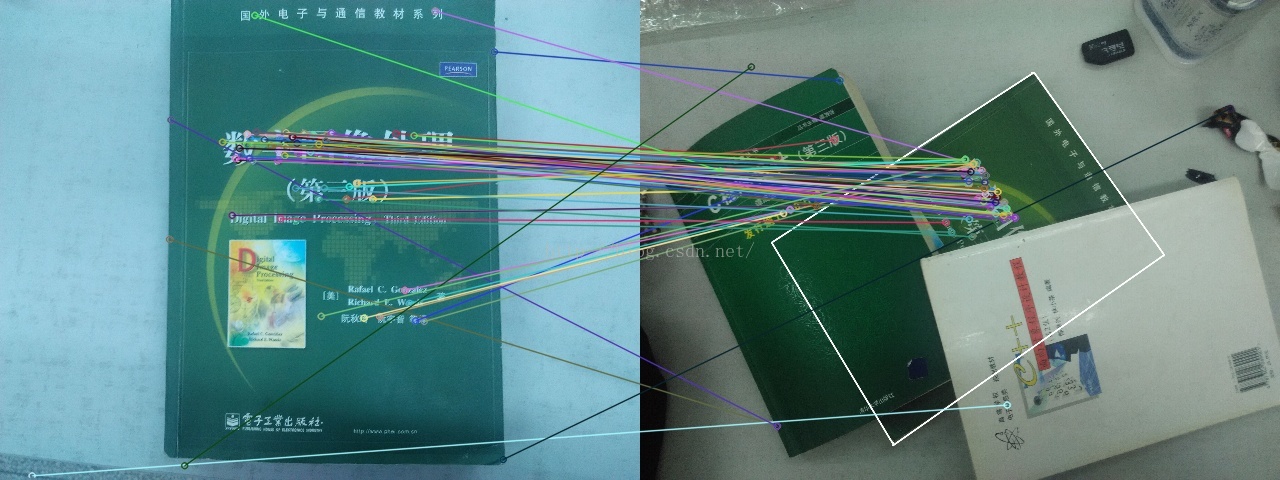
可以发现,仍然存在着很多错误的匹配点,所以再尝试用RANSAC算法消除错误匹配,尝试使用openCV中的findFundamentalMat函数消除错误匹配:
通过使用findFundamentalMat函数,函数返回一个3*3的矩阵,一开始我认为这个矩阵就是变换矩阵,只要将左图中的点与这个变换矩阵相乘,就可以得到右图中的对应点。但是这其实是不对的。
在这里有一个误解,就是findFundamentalMat函数确实可以使用RANSAC方法消除错误匹配,从名字上可以发现,这个函数的作用是返回基础矩阵的,基础矩阵和变换矩阵是两个不同的概念。基础矩阵描述是三维场景中的像点之间的对应关系(其实到现在为止这个函数求出的基础矩阵有个毛用我也不知道)。所以说,如果使用这个函数,这个实验也就能做到这一步了,没法再往下做了。
所以,为了得到变换矩阵,后来我才发现openCV中还有函数findHomography,这个函数才是真正的计算变换矩阵的函数,它的函数返回值才是真正的变换矩阵。
其实这个问题困扰了我很久,关于消除错误匹配的方法,网上查出来的多数都是通过findFundamentalMat函数来进行,所以我就想当然的认为该函数的返回值是变换矩阵了。而网上关于findHomography的介绍比较少,所以才会让人们误解findFundamentalMat会计算出变换矩阵了。
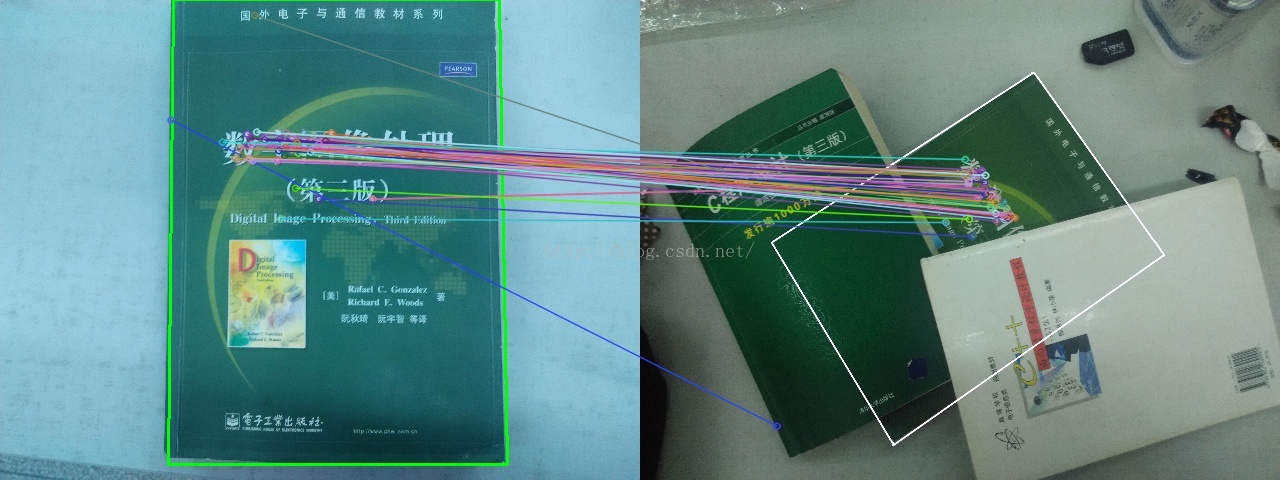
尝试用findHomography函数返回的矩阵,在模板图像中,已经用绿色方框标示出物体轮廓,根据物体的四个边界点,与变换矩阵相乘,即可得到变换后的物体的轮廓的四个边界点,将此边界点连接即为物体轮廓,如下图所示(绿色方框为事先标注的模板物体中的轮廓,白色方框为事先标注的测试图片中的轮廓,红色方框为经过绿色方框经变换矩阵变换后计算出的轮廓):
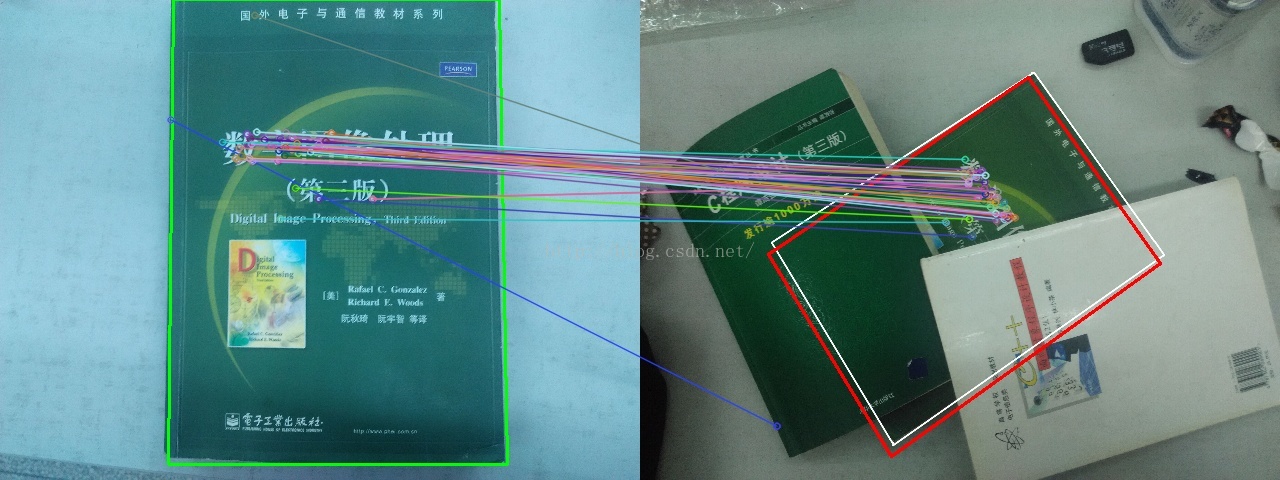
从结果可以看出,这才是比较正确的结果。
实验过程中的主要代码如下(这是主要的代码,SIFT算法和一些其他的功能函数我都写在了其他的文件中):
#include<math.h>
#include<time.h> #include <windows.h>
#include <iostream>
using namespace std;
#include <cv.h>
#include <highgui.h>
#include <cxcore.h>
using namespace cv;
#include "sift.h"
#include "my_function.h" int main()
{
//加载两幅图片
Mat src1 = imread("F:\\ylab\\image database\\camera\\obj01_001.jpg");
Mat src2 = imread("F:\\ylab\\image database\\imagesTest2\\test01_.jpg"); //这四个坐标是模板图像中绿色方框的四个顶点
Point2f m1(173.0,0.0),m2(168.0,464.0),m3(507.0,464.0),m4(499.0,0.0);
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(173.0,0.0);
obj_corners[1] = cvPoint(168.0,464.0);
obj_corners[2] = cvPoint(507.0,464.0);
obj_corners[3] = cvPoint(499.0,0.0); //原始图片比较大,我这里将图片同一处理成了640*480的大小
Size certainsize=Size(640,480);
Mat src_1;
Mat src_2;
resize(src1,src_1,certainsize);
resize(src2,src_2,certainsize); //两个图像的特征点序列
Vector<Keypoint> feature_1,feature_2; //采用sift算法,计算特征点序列,这个SIFT函数是在另外的文件中写好的
Sift(src_1, feature_1, 1.6);
Sift(src_2, feature_2, 1.6); //feature_dis为带有距离的特征点结构体序列
Vector<Key_point> feature_dis_1;
Vector<Key_point> feature_dis_2;
Vector<Key_point> result; //对特征点进行匹配,这个Match_feature是我自己写的,就是采用最近比次近小于0.8即为合适的匹配,这种匹配方式
//openCV中并没有,所以我就自己写了
Match_feature(feature_1,feature_2,feature_dis_1,feature_dis_2); printf("The number of features is %d\n",feature_1.size());
printf("The number of the match features is %d\n",feature_dis_1.size()); //从这里开始使用RANSAC方法进行运算
//下面的程序都好无奈,所有的结构都只能转化成openCV的类型才能用openCV的函数。。
Ptr<DescriptorMatcher> descriptor_matcher = DescriptorMatcher::create( "BruteForce" );//创建特征匹配器
int count=feature_dis_1.size(); //把特征点序列转化成openCV能够使用的类型
vector<KeyPoint>keypoints1,keypoints2;
KeyPoint keyp;
for(int i=0;i<count;i++)
{
keyp.pt.x=feature_dis_1[i].dx;
keyp.pt.y=feature_dis_1[i].dy;
keypoints1.push_back(keyp);
keyp.pt.x=feature_dis_2[i].dx;
keyp.pt.y=feature_dis_2[i].dy;
keypoints2.push_back(keyp);
} Mat descriptors1(count,FEATURE_ELEMENT_LENGTH, CV_32F);
Mat descriptors2(count,FEATURE_ELEMENT_LENGTH, CV_32F); for (int i=0; i<count; i++)
{
for(int j=0;j<FEATURE_ELEMENT_LENGTH;j++)
{
descriptors1.at<float>(i,j)=feature_dis_1[i].descriptor[j];
descriptors2.at<float>(i,j)=feature_dis_2[i].descriptor[j];
} } Mat img_match;
vector<DMatch> matches;
descriptor_matcher->match( descriptors1, descriptors2, matches );
Mat img_matches;
drawMatches(src_1,keypoints1,src_2,keypoints2,matches,img_matches);
//其实我前面已经完成匹配了,到这里,用openCV自带的方式重新匹配了一遍,并且显示了一下
imshow("SIFT",img_matches);
//imwrite("F:\\ylab\\CSDN_image\\3.jpg",img_matches); Mat p1(feature_dis_1.size(),2,CV_32F);
Mat p2(feature_dis_1.size(),2,CV_32F);
for(int i=0;i<feature_dis_1.size();i++)
{
p1.at<float>(i,0)=feature_dis_1[i].dx;
p1.at<float>(i,1)=feature_dis_1[i].dy;
p2.at<float>(i,0)=feature_dis_2[i].dx;
p2.at<float>(i,1)=feature_dis_2[i].dy;
}
// 用RANSAC方法计算F
Mat m_Fundamental;
// 上面这个变量是基本矩阵
vector<uchar> m_RANSACStatus;
// 上面这个变量已经定义过,用于存储RANSAC后每个点的状态 //一开始使用findFundamentalMat函数,发现可以消除错误匹配,实现很好的效果,但是
//就是函数返回值不是变换矩阵,而是没有什么用的基础矩阵
m_Fundamental = findFundamentalMat(p1,p2,m_RANSACStatus,CV_FM_RANSAC); //这里使用findHomography函数,这个函数的返回值才是真正的变换矩阵
Mat m_homography;
vector<uchar> m;
m_homography=findHomography(p1,p2,CV_RANSAC,3,m); //由变换矩阵,求得变换后的物体边界四个点
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, m_homography);
line( src_2, scene_corners[0] , scene_corners[1] , Scalar(0, 0, 255), 2 );
line( src_2, scene_corners[1] , scene_corners[2] , Scalar(0, 0, 255), 2 );
line( src_2, scene_corners[2] , scene_corners[3] , Scalar(0, 0, 255), 2 );
line( src_2, scene_corners[3] , scene_corners[0] , Scalar(0, 0, 255), 2 ); int nr=m_Fundamental.rows; // number of rows
int nc=m_Fundamental.cols *m_Fundamental.channels(); // total number of elements per line // 计算野点个数
int OutlinerCount = 0;
for (int i=0; i<Count; i++)
{
if (m_RANSACStatus[i] == 0) // 状态为0表示野点
{
OutlinerCount++;
}
} // 计算内点
vector<Point2f> m_LeftInlier;
vector<Point2f> m_RightInlier;
vector<DMatch> m_InlierMatches;
// 上面三个变量用于保存内点和匹配关系
int ptCount = (int)matches.size();
int InlinerCount = ptCount - OutlinerCount;
m_InlierMatches.resize(InlinerCount);
m_LeftInlier.resize(InlinerCount);
m_RightInlier.resize(InlinerCount);
InlinerCount = 0;
for (int i=0; i<ptCount; i++)
{
if (m_RANSACStatus[i] != 0)
{
m_LeftInlier[InlinerCount].x = p1.at<float>(i, 0);
m_LeftInlier[InlinerCount].y = p1.at<float>(i, 1);
m_RightInlier[InlinerCount].x = p2.at<float>(i, 0);
m_RightInlier[InlinerCount].y = p2.at<float>(i, 1);
m_InlierMatches[InlinerCount].queryIdx = InlinerCount;
m_InlierMatches[InlinerCount].trainIdx = InlinerCount;
InlinerCount++;
}
}
// //printf("最终的匹配点个数为:%d\n",InlinerCount);
//// 把内点转换为drawMatches可以使用的格式
vector<KeyPoint> key1(InlinerCount);
vector<KeyPoint> key2(InlinerCount);
KeyPoint::convert(m_LeftInlier, key1);
KeyPoint::convert(m_RightInlier, key2); // 显示计算F过后的内点匹配
//Mat m_matLeftImage;
//Mat m_matRightImage;
// 以上两个变量保存的是左右两幅图像 line(src_1,m1,m2,Scalar(0,255,0),2);
line(src_1,m2,m3,Scalar(0,255,0),2);
line(src_1,m3,m4,Scalar(0,255,0),2);
line(src_1,m4,m1,Scalar(0,255,0),2); Mat OutImage;
drawMatches(src_1, key1, src_2, key2, m_InlierMatches, OutImage);
imshow("SIFT_RANSAC",OutImage);
//imwrite("F:\\ylab\\CSDN_image\\5.jpg",OutImage);
cvWaitKey( 0 );
return 0;
}
(转载)利用SIFT和RANSAC算法(openCV框架)实现物体的检测与定位,并求出变换矩阵(findFundamentalMat和findHomography的比较) 置顶的更多相关文章
- 图像配准建立仿射变换模型并用RANSAC算法评估
当初选方向时就由于从小几何就不好.缺乏空间想像能力才没有选择摄影測量方向而是选择了GIS. 昨天同学找我帮他做图像匹配.这我哪里懂啊,无奈我是一个别人有求于我,总是不好意思开口拒绝的人.于是乎就看着他 ...
- python利用sift和surf进行图像配准
1.SIFT特征点和特征描述提取(注意opencv版本) 高斯金字塔:O组L层不同尺度的图像(每一组中各层尺寸相同,高斯函数的参数不同,不同组尺寸递减2倍) 特征点定位:极值点 特征点描述:根据不同b ...
- 利用SIFT进行特征匹配
SIFT算法是一种基于尺度空间的算法.利用SIFT提取出的特征点对旋转.尺度变化.亮度变化具有不变性,对视角变化.仿射变换.噪声也有一定的稳定性. SIFT实现特征的匹配主要包括四个步骤: 提取特征点 ...
- sift 与 surf 算法
http://blog.csdn.net/cy513/article/details/4414352 SURF算法是SIFT算法的加速版,OpenCV的SURF算法在适中的条件下完成两幅图像中物体的匹 ...
- 机器视觉之 ICP算法和RANSAC算法
临时研究了下机器视觉两个基本算法的算法原理 ,可能有理解错误的地方,希望发现了告诉我一下 主要是了解思想,就不写具体的计算公式之类的了 (一) ICP算法(Iterative Closest Poin ...
- OpenCV2马拉松第25圈——直线拟合与RANSAC算法
计算机视觉讨论群162501053 转载请注明:http://blog.csdn.net/abcd1992719g/article/details/28118095 收入囊中 最小二乘法(least ...
- RANSAC算法详解
给定两个点p1与p2的坐标,确定这两点所构成的直线,要求对于输入的任意点p3,都可以判断它是否在该直线上.初中解析几何知识告诉我们,判断一个点在直线上,只需其与直线上任意两点点斜率都相同即可.实际操作 ...
- OpenCV框架介绍
OpenCV框架介绍 概述 OpenCV是一个开放源代码的计算机视觉应用平台,由英特尔公司下属研发中心俄罗斯团队发起该项目,开源BSD证书,OpenCV的目标是实现实时计算机视觉,,是一个跨平台的计算 ...
- RANSAC算法在图像拼接上的应用的实现
关于算法原理请参考<基于SURF特征的图像与视频拼接技术的研究>. 一.问题提出 RANSAC的算法原理并不复杂,比较复杂的地方在于"建立模型"和&qu ...
随机推荐
- orcle 如何快速插入百万千万条数据
有时候做实验测试数据用到大量数据时可以用以下方法插入: 方法一:使用xmltable create table bqh8 as select rownum as id from xmltable('1 ...
- October 13th 2017 Week 41st Friday
The shortest distance between two people is a smile. 人与人之间最短的距离是微笑. I find a smiling face can bring ...
- October 10th 2017 Week 41st Tuesday
If you focus on what you left behind you will never see what lies ahead. 如果你只顾回头看,那么你永远也看不见前方有什么. Ye ...
- SDN期末作业验收
作业链接:https://edu.cnblogs.com/campus/fzu/SoftwareDefinedNetworking2017/homework/1585 负载均衡程序 1.github链 ...
- BZOJ3534:[SDOI2014]重建(矩阵树定理)
Description T国有N个城市,用若干双向道路连接.一对城市之间至多存在一条道路. 在一次洪水之后,一些道路受损无法通行.虽然已经有人开始调查道路的损毁情况,但直到现在几乎没有消息传回. 幸运 ...
- JSSDK图像接口多张图片上传下载并将图片流写入本地
<span style="font-size: 14px;"><!DOCTYPE html> <html lang="en"> ...
- 日常使用Shell积累
HDFS统计文件行数: hdfs dfs -cat hdfs://ns3/wordcount/* |wc -l
- PHP错误提示的关闭方法详解
关闭PHP错误脚本提示是程序上线了必须做的一件事情,就是不管程序怎么报错我们都不能让错误日志在服务器上给大家看到,下面我来总结两种关闭PHP错误脚本提示的具体方法 最简单的办法就是直接在php ...
- C. Sad powers
You're given Q queries of the form (L, R). For each query you have to find the number of such x that ...
- Python学习系列:PyCharm CE 安装与测试
开坑啦开坑啦~最近比赛要用Python了,开始强行学习. Mac下PyCharm CE 安装 先去百度PyCharm,一个很好用IDE,下载免费版的就够用啦: https://www.jetbrain ...