PCL学习(三) SAC-IA 估记object pose
SAC-IA是基于RANSAC算法的对齐算法
通过降采样提高法向计算、FPFH特征的计算
最后通过SAC-IA计算得到对齐的旋转和平移
#include <Eigen/Core>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/common/time.h>
#include <pcl/console/print.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/fpfh_omp.h>
#include <pcl/filters/filter.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/io/pcd_io.h>
#include <pcl/registration/icp.h>
#include <pcl/registration/sample_consensus_prerejective.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <string>
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
// Types
typedef pcl::PointNormal PointNT;
typedef pcl::PointCloud<PointNT> PointCloudT;
typedef pcl::FPFHSignature33 FeatureT;
typedef pcl::FPFHEstimationOMP<PointNT, PointNT, FeatureT> FeatureEstimationT;
typedef pcl::PointCloud<FeatureT> FeatureCloudT;
typedef pcl::visualization::PointCloudColorHandlerCustom<PointNT> ColorHandlerT; //handle the param of the align in the txt to save the fucking time of complie
int parseConfigFile(
const std::string &filepath,
char *objFile,
char *sceFile,
float *downLeaf
); // Align a rigid object to a scene with clutter and occlusions
int main(int argc, char **argv)
{
// Point clouds
PointCloudT::Ptr object(new PointCloudT);
PointCloudT::Ptr object_aligned(new PointCloudT);
PointCloudT::Ptr scene(new PointCloudT);
FeatureCloudT::Ptr object_features(new FeatureCloudT);
FeatureCloudT::Ptr scene_features(new FeatureCloudT); // Get input object and scene
/*if (argc != 3)
{
pcl::console::print_error("Syntax is: %s object.pcd scene.pcd\n", argv[0]);
return (1);
}*/
/*std::string paramFilePath = "data/param.txt";
char *obj_filepath = { '\0' };
char *sce_filepath = { '\0' };
float *downsample_leaf = nullptr;
parseConfigFile(
paramFilePath,
obj_filepath,
sce_filepath,
downsample_leaf
);*/ // Load object and scene
pcl::console::print_highlight("Loading point clouds...\n");
if (pcl::io::loadPCDFile<PointNT>("data/obj_seg.pcd", *object) < 0 ||//"data/obj_seg.pcd"
pcl::io::loadPCDFile<PointNT>("data/sce_seg.pcd", *scene) < 0) //"data/sce_seg.pcd"
{
pcl::console::print_error("Error loading object/scene file!\n");
return (1);
} // Downsample
pcl::console::print_highlight("Downsampling...\n");
pcl::VoxelGrid<PointNT> grid;
const float leaf = 0.08f;//0.005f == resolution of 5mm
grid.setLeafSize(leaf, leaf, leaf);
grid.setInputCloud(object);
grid.filter(*object);
grid.setInputCloud(scene);
grid.filter(*scene); // Estimate normals for scene
pcl::console::print_highlight("Estimating scene normals...\n");
pcl::NormalEstimationOMP<PointNT, PointNT> nest;
nest.setRadiusSearch(0.01);
nest.setInputCloud(scene);
nest.compute(*scene); // Estimate features
pcl::console::print_highlight("Estimating features...\n");
FeatureEstimationT fest;
fest.setRadiusSearch(0.025);
fest.setInputCloud(object);
fest.setInputNormals(object);
fest.compute(*object_features);
fest.setInputCloud(scene);
fest.setInputNormals(scene);
fest.compute(*scene_features); // Perform alignment
pcl::console::print_highlight("Starting alignment...\n");
pcl::SampleConsensusPrerejective<PointNT, PointNT, FeatureT> align;
align.setInputSource(object);
align.setSourceFeatures(object_features);
align.setInputTarget(scene);
align.setTargetFeatures(scene_features);
align.setMaximumIterations(100000); // Number of RANSAC iterations 50000
align.setNumberOfSamples(3); // Number of points to sample for generating/prerejecting a pose
align.setCorrespondenceRandomness(5); // Number of nearest features to use
align.setSimilarityThreshold(0.9f); // Polygonal edge length similarity threshold
align.setMaxCorrespondenceDistance(2.5f * leaf); // Inlier threshold
align.setInlierFraction(0.25f); // Required inlier fraction for accepting a pose hypothesis
{
pcl::ScopeTime t("Alignment");
align.align(*object_aligned);
} if (align.hasConverged())
{
// Print results
printf("\n");
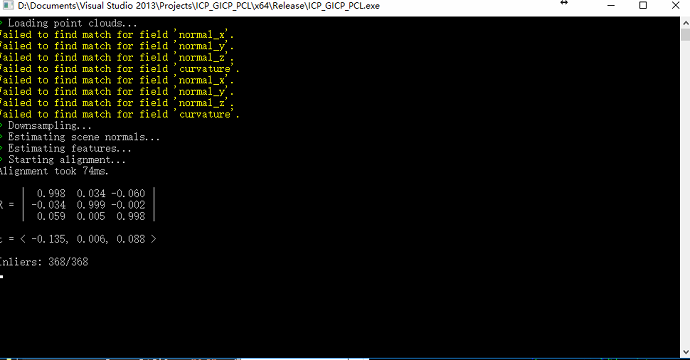
Eigen::Matrix4f transformation = align.getFinalTransformation();
pcl::console::print_info(" | %6.3f %6.3f %6.3f | \n", transformation(0, 0), transformation(0, 1), transformation(0, 2));
pcl::console::print_info("R = | %6.3f %6.3f %6.3f | \n", transformation(1, 0), transformation(1, 1), transformation(1, 2));
pcl::console::print_info(" | %6.3f %6.3f %6.3f | \n", transformation(2, 0), transformation(2, 1), transformation(2, 2));
pcl::console::print_info("\n");
pcl::console::print_info("t = < %0.3f, %0.3f, %0.3f >\n", transformation(0, 3), transformation(1, 3), transformation(2, 3));
pcl::console::print_info("\n");
pcl::console::print_info("Inliers: %i/%i\n", align.getInliers().size(), object->size()); // Show alignment
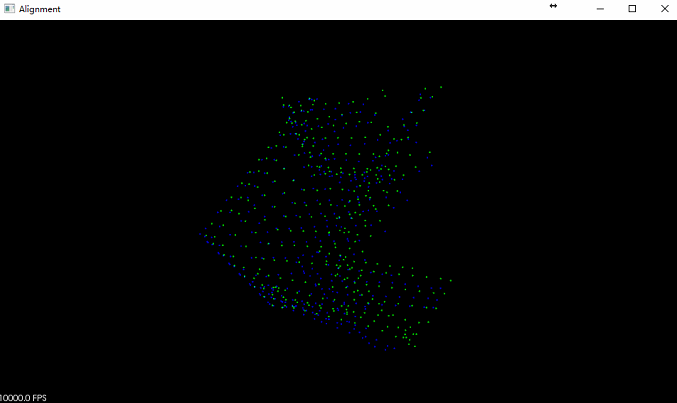
pcl::visualization::PCLVisualizer visu("Alignment");
visu.addPointCloud(scene, ColorHandlerT(scene, 0.0, 255.0, 0.0), "scene");
visu.addPointCloud(object_aligned, ColorHandlerT(object_aligned, 0.0, 0.0, 255.0), "object_aligned");
visu.spin();
system("PAUSE");
}
else
{
pcl::console::print_error("Alignment failed!\n");
system("PAUSE");
return (1);
} return (0);
} int parseConfigFile(
const std::string &filepath,
char *objFile,
char *sceFile,
float *downLeaf
)
{
// open the configuration file
FILE *file = fopen(filepath.c_str(), "r");
//FILE *stream;//test
if (!file)
{
fprintf(stderr, "Cannot parse configuration file \"%s\".\n",
filepath.c_str());
exit(1);
}
//read parameters
char buf[256];
while (fscanf(file, "%s", buf) != EOF) {
switch (buf[0]) {
case '#':
fgets(buf, sizeof(buf), file);
break;
case'o':
fgets(buf, sizeof(buf), file);
memcpy(objFile, buf + 1, strlen(buf) - 2);
//printf("%s", objFile);
break;
case's':
fgets(buf, sizeof(buf), file);
memcpy(sceFile, buf + 1, strlen(buf) - 2);
break;
case'l':
fscanf(file, "%f", downLeaf);
}
}
return 0; }
对齐前的点云数据(采集于两帧kinect的扫描深度图)

对齐后的结果
对齐的旋转和平移,以及对齐速度
PCL学习(三) SAC-IA 估记object pose的更多相关文章
- day 82 Vue学习三之vue组件
Vue学习三之vue组件 本节目录 一 什么是组件 二 v-model双向数据绑定 三 组件基础 四 父子组件传值 五 平行组件传值 六 xxx 七 xxx 八 xxx 一 什么是组件 首先给 ...
- Android JNI学习(三)——Java与Native相互调用
本系列文章如下: Android JNI(一)——NDK与JNI基础 Android JNI学习(二)——实战JNI之“hello world” Android JNI学习(三)——Java与Nati ...
- Spring Boot 项目学习 (三) Spring Boot + Redis 搭建
0 引言 本文主要介绍 Spring Boot 中 Redis 的配置和基本使用. 1 配置 Redis 1. 修改pom.xml,添加Redis依赖 <!-- Spring Boot Redi ...
- HTTP学习三:HTTPS
HTTP学习三:HTTPS 1 HTTP安全问题 HTTP1.0/1.1在网络中是明文传输的,因此会被黑客进行攻击. 1.1 窃取数据 因为HTTP1.0/1.1是明文的,黑客很容易获得用户的重要数据 ...
- TweenMax动画库学习(三)
目录 TweenMax动画库学习(一) TweenMax动画库学习(二) TweenMax动画库学习(三) ...
- Struts2框架学习(三) 数据处理
Struts2框架学习(三) 数据处理 Struts2框架框架使用OGNL语言和值栈技术实现数据的流转处理. 值栈就相当于一个容器,用来存放数据,而OGNL是一种快速查询数据的语言. 值栈:Value ...
- 4.机器学习——统计学习三要素与最大似然估计、最大后验概率估计及L1、L2正则化
1.前言 之前我一直对于“最大似然估计”犯迷糊,今天在看了陶轻松.忆臻.nebulaf91等人的博客以及李航老师的<统计学习方法>后,豁然开朗,于是在此记下一些心得体会. “最大似然估计” ...
- DjangoRestFramework学习三之认证组件、权限组件、频率组件、url注册器、响应器、分页组件
DjangoRestFramework学习三之认证组件.权限组件.频率组件.url注册器.响应器.分页组件 本节目录 一 认证组件 二 权限组件 三 频率组件 四 URL注册器 五 响应器 六 分 ...
- [ZZ] 深度学习三巨头之一来清华演讲了,你只需要知道这7点
深度学习三巨头之一来清华演讲了,你只需要知道这7点 http://wemedia.ifeng.com/10939074/wemedia.shtml Yann LeCun还提到了一项FAIR开发的,用于 ...
随机推荐
- LibreOJ #507. 「LibreOJ NOI Round #1」接竹竿
二次联通门 : LibreOJ #507. 「LibreOJ NOI Round #1」接竹竿 /* LibreOJ #507. 「LibreOJ NOI Round #1」接竹竿 dp 记录一下前驱 ...
- docker部署springboot应用
1.安装运行node image docker pull java:8 2.将编译后的jar包上传到主机上 3.编写dockerfile,并创建镜像 Dockerfile FROM java:8MAI ...
- 1821:【00NOIP提高组】乘积最大
//dp QAQ #include<bits/stdc++.h> using namespace std; ][],f[][]; long long s; int main() { int ...
- jmeter+ant执行 报错:Reference xslt.classpath not found 【采坑记录】
问题: report: BUILD FAILED E:\jmeter\apache-jmeter-4.0\testcase\build.xml:29: The following error occu ...
- 好用的zookeeper客服端----Curator初探
maven配置: <dependency> <groupId>org.apache.curator</groupId> <artifactId>cura ...
- Arts打卡第10周
Algorithm.主要是为了编程训练和学习. 每周至少做一个 leetcode 的算法题(先从Easy开始,然后再Medium,最后才Hard). 进行编程训练,如果不训练你看再多的算法书,你依然不 ...
- HttpClient学习(三)—— AsyncHttpClient使用
一.介绍 This class support asynchronous and synchronous HTTP requests. AsyncHttpClient 支持同步.异步Http请求. 二 ...
- 关于Scanner调用 sc.nextInt() 异常try后不能二次输入导致死循环问题
先看下简化的代码,引出问题所在: public class Run { public static void main(String[] args) { Scanner sc = new Scanne ...
- Windows 自动定时执行任务的方法
windows 自动定时执行任务的几种实现方法 Task Schedul Windows自动定时执行任务,常见的方法有三种: Windows 任务计划程序 Windows Service SQL ...
- POM 标签大全详解
<project xmlns="http://maven.apache.org/POM/4.0.0" xmlns:xsi="http://www.w3.org/20 ...