Faster-RCNN 算法解读(转)
论文:《Faster R-CNN: Towards Real-Time ObjectDetection with Region Proposal Networks》
摘要:算法主要解决两个问题:
1、提出区域建议网络RPN,快速生成候选区域;
2、通过交替训练,使RPN和Fast-RCNN网络共享参数。
一、 RPN网络结构
RPN网络的作用是输入一张图像,输出一批矩形候选区域,类似于以往目标检测中的Selective Search一步。网络结构是基于卷积神经网络,但输出包含二类softmax和bbox回归的多任务模型。网络结果如下(以ZF网络为参考模型):
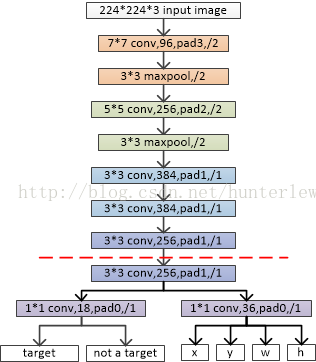
其中,虚线以上是ZF网络最后一层卷积层前的结构,虚线以下是RPN网络特有的结构。首先是3*3的卷积,然后通过1*1卷积输出分为两路,其中一路输出是目标和非目标的概率,另一路输出box相关的四个参数,包括box的中心坐标x和y,box宽w和长h。
(至于之前为什么要用3*3的卷积核,我觉得是和感受野大小相对应的。在原来的ZF模型中,3*3卷积核对应map比例是3/13,相当于在型如1000*600的图片中采用180左右的感受野。对于1000*600的图片中大部分目标而言,这个大小的感受野是比较合适的吧。)
从卷积运算本身而言,卷积相当于滑窗。假如输入图像是1000*600,则经过了几次stride后,map大小缩小了16倍,最后一层卷积层输出大约为60*40大小,那么相当于用3*3的窗口滑窗(注意有padding),对于左边一支路而言,输出18个通道,每个通道map大小仍为60*40,代表每个滑窗中心对应感受野内存在目标与否的概率。右支路同理。
二、 anchor机制
anchor是rpn网络的核心。刚刚说到,需要确定每个滑窗中心对应感受野内存在目标与否。由于目标大小和长宽比例不一,需要多个尺度的窗。Anchor即给出一个基准窗大小,按照倍数和长宽比例得到不同大小的窗。例如论文中基准窗大小为16,给了(8、16、32)三种倍数和(0.5、1、2)三种比例,这样能够得到一共9种尺度的anchor,如图(摘自http://blog.csdn.net/shenxiaolu1984/article/details/51152614)。
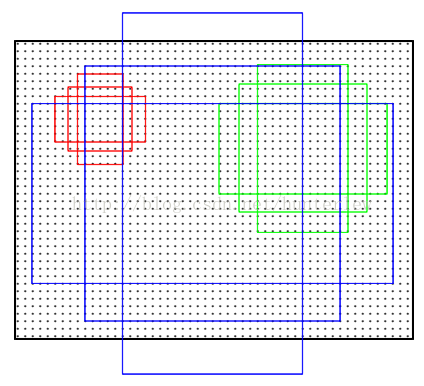
因此,在对60*40的map进行滑窗时,以中心像素为基点构造9种anchor映射到原来的1000*600图像中,映射比例为16倍。那么总共可以得到60*40*9大约2万个anchor。
三、 训练
RPN网络训练,那么就涉及ground truth和loss function的问题。对于左支路,ground truth为anchor是否为目标,用0/1表示。那么怎么判定一个anchor内是否有目标呢?论文中采用了这样的规则:1)假如某anchor与任一目标区域的IoU最大,则该anchor判定为有目标;2)假如某anchor与任一目标区域的IoU>0.7,则判定为有目标;3)假如某anchor与任一目标区域的IoU<0.3,则判定为背景。所谓IoU,就是预测box和真实box的覆盖率,其值等于两个box的交集除以两个box的并集。其它的anchor不参与训练。
于是,代价函数定义为:

代价函数分为两部分,对应着RPN两条支路,即目标与否的分类误差和bbox的回归误差,其中Leg(ti,ti*) = R(ti-ti*)采用在Fast-RCNN中提出的平滑L1函数,作者认为其比L2形式的误差更容易调节学习率。注意到回归误差中Leg与pi相乘,因此bbox回归只对包含目标的anchor计算误差。也就是说,如果anchor不包含目标,box输出位置无所谓。所以对于bbox的groundtruth,只考虑判定为有目标的anchor,并将其标注的坐标作为ground truth。此外,计算bbox误差时,不是比较四个角的坐标,而是tx,ty,tw,th,具体计算如下:

四、 联合训练
作者采用四步训练法:
1) 单独训练RPN网络,网络参数由预训练模型载入;
2) 单独训练Fast-RCNN网络,将第一步RPN的输出候选区域作为检测网络的输入。具体而言,RPN输出一个候选框,通过候选框截取原图像,并将截取后的图像通过几次conv-pool,然后再通过roi-pooling和fc再输出两条支路,一条是目标分类softmax,另一条是bbox回归。截止到现在,两个网络并没有共享参数,只是分开训练了;
3) 再次训练RPN,此时固定网络公共部分的参数,只更新RPN独有部分的参数;
4) 那RPN的结果再次微调Fast-RCNN网络,固定网络公共部分的参数,只更新Fast-RCNN独有部分的参数。
至此,网络训练结束,网络集检测-识别于一体,测试阶段流程图如下:

有一些实现细节,比如RPN网络得到的大约2万个anchor不是都直接给Fast-RCNN,因为有很多重叠的框。文章通过非极大值抑制的方法,设定IoU为0.7的阈值,即仅保留覆盖率不超过0.7的局部最大分数的box(粗筛)。最后留下大约2000个anchor,然后再取前N个box(比如300个)给Fast-RCNN。Fast-RCNN将输出300个判定类别及其box,对类别分数采用阈值为0.3的非极大值抑制(精筛),并仅取分数大于某个分数的目标结果(比如,只取分数60分以上的结果)。
Faster-RCNN 算法解读(转)的更多相关文章
- 第三十一节,目标检测算法之 Faster R-CNN算法详解
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal network ...
- 【目标检测】Faster RCNN算法详解
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal network ...
- 目标检测算法之Faster R-CNN算法详解
Fast R-CNN存在的问题:选择性搜索,非常耗时. 解决:加入一个提取边缘的神经网络,将候选框的选取交给神经网络. 在Fast R-CNN中引入Region Proposal Network(RP ...
- faster rcnn算法及源码及论文解析相关博客
1. 通过代码理解faster-RCNN中的RPN http://blog.csdn.net/happyflyy/article/details/54917514 2. faster rcnn详解 R ...
- Faster RCNN算法训练代码解析(3)
四个层的forward函数分析: RoIDataLayer:读数据,随机打乱等 AnchorTargetLayer:输出所有anchors(这里分析这个) ProposalLayer:用产生的anch ...
- Faster RCNN算法训练代码解析(1)
这周看完faster-rcnn后,应该对其源码进行一个解析,以便后面的使用. 那首先直接先主函数出发py-faster-rcnn/tools/train_faster_rcnn_alt_opt.py ...
- Faster RCNN算法demo代码解析
一. Faster-RCNN代码解释 先看看代码结构: Data: This directory holds (after you download them): Caffe models pre-t ...
- Faster RCNN算法训练代码解析(2)
接着上篇的博客,我们获取imdb和roidb的数据后,就可以搭建网络进行训练了. 我们回到trian_rpn()函数里面,此时运行完了roidb, imdb = get_roidb(imdb_name ...
- 论文阅读笔记二十七:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks(CVPR 2016)
论文源址:https://arxiv.org/abs/1506.01497 tensorflow代码:https://github.com/endernewton/tf-faster-rcnn 室友对 ...
- 目标检测-Faster R-CNN
[目标检测]Faster RCNN算法详解 Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with r ...
随机推荐
- 信息系统项目管理师EV、PV、AC、BAC、CV、SV、EAC、ETC、CPI、SPI概念说明
挣值常用名词: AC [Actual Cost] 实际成本:完成工作的实际成本是多少? [96版的ACWP] PV [Planned Value] 计划值: 应该完成多少工作? [96版的BCWS] ...
- POJ 1905 Expanding Rods 木棍膨胀
描述 当长度为L的一根细木棍的温度升高n度,它会膨胀到新的长度L'=(1+n*C)*L,其中C是热膨胀系数. 当一根细木棍被嵌在两堵墙之间被加热,它将膨胀形成弓形的弧,而这个弓形的弦恰好是未加热前木棍 ...
- C#编程 - 交通灯模拟
程序写的有点繁杂,但大体功能出来的! 效果图: using System; using System.Collections.Generic; using System.Linq; using Sys ...
- Android 中的设计模式
1.单例模式 ContentProvider是单例模式,多个ContentResolver操作的都是同一个ContentProvider.
- Django——photo
要点: models 图片类型文件要使用models.ImageField(upload='文件夹名') 普通文件使用FileField 时间类型使用DatetimeField(auto_now_ad ...
- boost::lockfree::queue多线程读写实例
最近的任务是写一个多线程的东西,就得接触多线程队列了,我反正是没学过分布式的,代码全凭感觉写出来的,不过运气好,代码能够work= = 话不多说,直接给代码吧,一个多消费者,多生产者的模式.假设我的任 ...
- .NET的前世今生与将来
笔者注 谨以此文纪念我敬重的2016年9月17日去世的 装配脑袋 逝世两周年 让大家久等了,前后花了1年的时间,几经改版,终于完成撰写了一万字长文,回顾和展望.NET这16年来的成功与失败.最终能成文 ...
- Logical Volume Manager (LVM)
LVM 是一种可用在Linux内核的逻辑分卷管理器:可用于管理磁盘驱动器或其他类似的大容量存储设备. 本文提供如何在 Arch Linux 中配置和使用 Logical Volume Manager ...
- Pipenv和Python虚拟环境
Pipenv & 虚拟环境 本教程将引导您完成安装和使用 Python 包. 它将向您展示如何安装和使用必要的工具,并就最佳做法做出强烈推荐.请记住, Python 用于许多不同的目的.准确地 ...
- jQuery CVE-2019-11358原型污染漏洞分析和修复建议
一.安全通告 jQuery官方于日前发布安全预警通告,通报了漏洞编号为 CVE-2019-11358的原型污染漏洞.由攻击者控制的属性可被注入对象,之后或经由触发 JavaScript 异常引发拒绝服 ...