基于 HTML5 WebGL 的垃圾分类系统
前言
垃圾分类,一般是指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用。垃圾在分类储存阶段属于公众的私有品,垃圾经公众分类投放后成为公众所在小区或社区的区域性准公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源。从国内外各城市对生活垃圾分类的方法来看,大致都是根据垃圾的成分、产生量,结合本地垃圾的资源利用和处理方式来进行分类的。到2019年6月25日,生活垃圾分类制度将入法。一套应用于工业物联网的智能一体化的垃圾分类机械臂将随之而来,由此,我应用 HT for Web 的图型化编辑工具打造了一款形象生动的例子:Garbage classification,也借此机会与大家一起分享和学习。
代码实现
(注:gif 的上传大小有限,实际效果与还请参考 demo 链接)
首先,我应用已经精心布置好的 3D 场景,为了有更好的操作体验感,我们要从它的基本设置开始:
gv.setMovableFunc(() => { return false }) // 禁止拖动
gv.getWireframe = (d) => { d.s('wf.visible', false) } // 隐藏选中边框
gv.setEye([583, -212, -789]) // 设置眼睛
gv.setCenter([-76, -654, -133]) // 设置中心点
gv.setFar(100000) // 设置远端位置
gv.setNear(10) // 设置近端位置
gv.setInteractors([ new ht.graph3d.MapInteractor(gv) ]) // 设置交互限制
gv.setSkyBox(dm.getDataByTag('skyBox')) // 设置天空球
window.document.oncontextmenu = () => { return false } // 全局设置右键菜单禁用
gv.scene = { // 复制初始位置
eye: ht.Default.clone(gv.getEye()),
center: ht.Default.clone(gv.getCenter()),
far: ht.Default.clone(gv.getFar()),
near: ht.Default.clone(gv.getNear()),
}
我复制了一下整个场景的初始视角情况方便我做稍后的处理,我监听了部分鼠标事件来形成自己的操作风格(比如双击背景还原视角以及双击模型拉近视角):
gv.mi(e => {
let data = e.data
let kind = e.kind
if (kind === 'doubleClickBackground') { // 双击背景
gv.moveCamera(this.gv.scene.eye, this.gv.scene.center, {duration : 1000}) // 恢复视角
}
else if (kind === 'doubleClickData') { // 双击模型
gv.flyTo(data, {animation : {duration : 500}, distance : 800}) // 拉近视角
}
})
好了,准备工作做好了,下面来实现动画部分,除了了解 垃圾分类 的方式外我还参考了网上很多机械臂的视频,学习它的运动模式和动作细节,对每个结构和部位的动画进行步骤的排序和构思。这里我挑选几处动画的实现方式来展示:
function mechanicalArmAnim1() {
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
postbrachium.r3(degrees(0) + (degrees(20) - degrees(0)) * v, postbrachium.r3()[1], postbrachium.r3()[2]) // 后臂向下移
},
finishFunc: () => {
setTimeout(() => {
mechanicalArmAnim2()
}, 300)
}
})
}
function mechanicalArmAnim2() {
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
postbrachium.p3(-208 + (-184 + 208) * v, postbrachium.p3()[1], postbrachium.p3()[2]) // 后臂前伸
hydraulicRod1.r3(degrees(0) + (degrees(8) - degrees(0)) * v, hydraulicRod1.r3()[1], hydraulicRod1.r3()[2]) // 液压杆1倾斜
extensionRod1.r3(degrees(0) + (degrees(8) - degrees(0)) * v, extensionRod1.r3()[1], extensionRod1.r3()[2]) // 伸长杆1倾斜
extensionRod1.p3(-169 + (-185 + 169) * v, -516 + (-511 + 516) * v, extensionRod1.p3()[2]) // 伸长杆1伸长
hydraulicRod2.r3(degrees(0) + (degrees(-8) - degrees(0)) * v, hydraulicRod2.r3()[1], hydraulicRod2.r3()[2]) // 液压杆2倾斜
extensionRod2.r3(degrees(0) + (degrees(-8) - degrees(0)) * v, extensionRod2.r3()[1], extensionRod2.r3()[2]) // 伸长杆2倾斜
extensionRod2.p3(-169 + (-185 + 169) * v, -516 + (-511 + 516) * v, extensionRod2.p3()[2]) // 伸长杆2伸长
},
finishFunc: () => {
setTimeout(() => {
mechanicalArmAnim3()
}, 300)
}
})
}
function mechanicalArmAnim3() {
let oldValue = antebrachium.r3()[0]
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
hydraulicRod1.r3(degrees(8) + (degrees(7) - degrees(8)) * v, hydraulicRod1.r3()[1], hydraulicRod1.r3()[2]) // 液压杆1倾斜
extensionRod1.r3(degrees(8) + (degrees(7) - degrees(8)) * v, extensionRod1.r3()[1], extensionRod1.r3()[2]) // 伸长杆1倾斜
extensionRod1.p3(-185 + (-186 + 185) * v, -511 + (-507 + 511) * v, extensionRod1.p3()[2]) // 伸长杆1伸长
hydraulicRod2.r3(degrees(-8) + (degrees(-7) - degrees(-8)) * v, hydraulicRod2.r3()[1], hydraulicRod2.r3()[2]) // 液压杆2倾斜
extensionRod2.r3(degrees(-8) + (degrees(-7) - degrees(-8)) * v, extensionRod2.r3()[1], extensionRod2.r3()[2]) // 伸长杆2倾斜
extensionRod2.p3(-185 + (-186 + 185) * v, -511 + (-507 + 511) * v, extensionRod2.p3()[2]) // 伸长杆2伸长
postbrachium.r3(degrees(20) + (degrees(25) - degrees(20)) * v, postbrachium.r3()[1], postbrachium.r3()[2]) // 后臂向下移
antebrachium.r3(oldValue + (degrees(-40) - oldValue) * v, antebrachium.r3()[1], antebrachium.r3()[2]) // 前臂向下移
claw1.r3(degrees(-20) + (degrees(-60) - degrees(-20)) * v, claw1.r3()[1], claw1.r3()[2]) // 上爪抓取
claw2.r3(degrees(-60) + (degrees(-30) - degrees(-60)) * v, claw2.r3()[1], claw2.r3()[2]) // 下爪抓取
},
finishFunc: () => {
mechanicalArmAnim4()
}
})
}
这一段动画是机械臂从初始化状态到向下抓取的一个过程,我将每段动画分成函数来写比较方便后续管理,每一处也代表了一个步骤。这其中最复杂且细微的步骤要数液压杆的运动了,为了让动画看起来更加真实,我除了将手臂单独运动的过程中加入了延时执行下一段动画以体现机器运动的特点外,也把液压杆的部分也做了动画,如果不做处理,那么机械臂在上下移动的时候就会有不科学的效果出现。动画函数 在这种 demo 中应用的最广,而且里面也包含了一些缓动函数,有兴趣的博友们可以 点此处 自己亲自动手玩一玩~
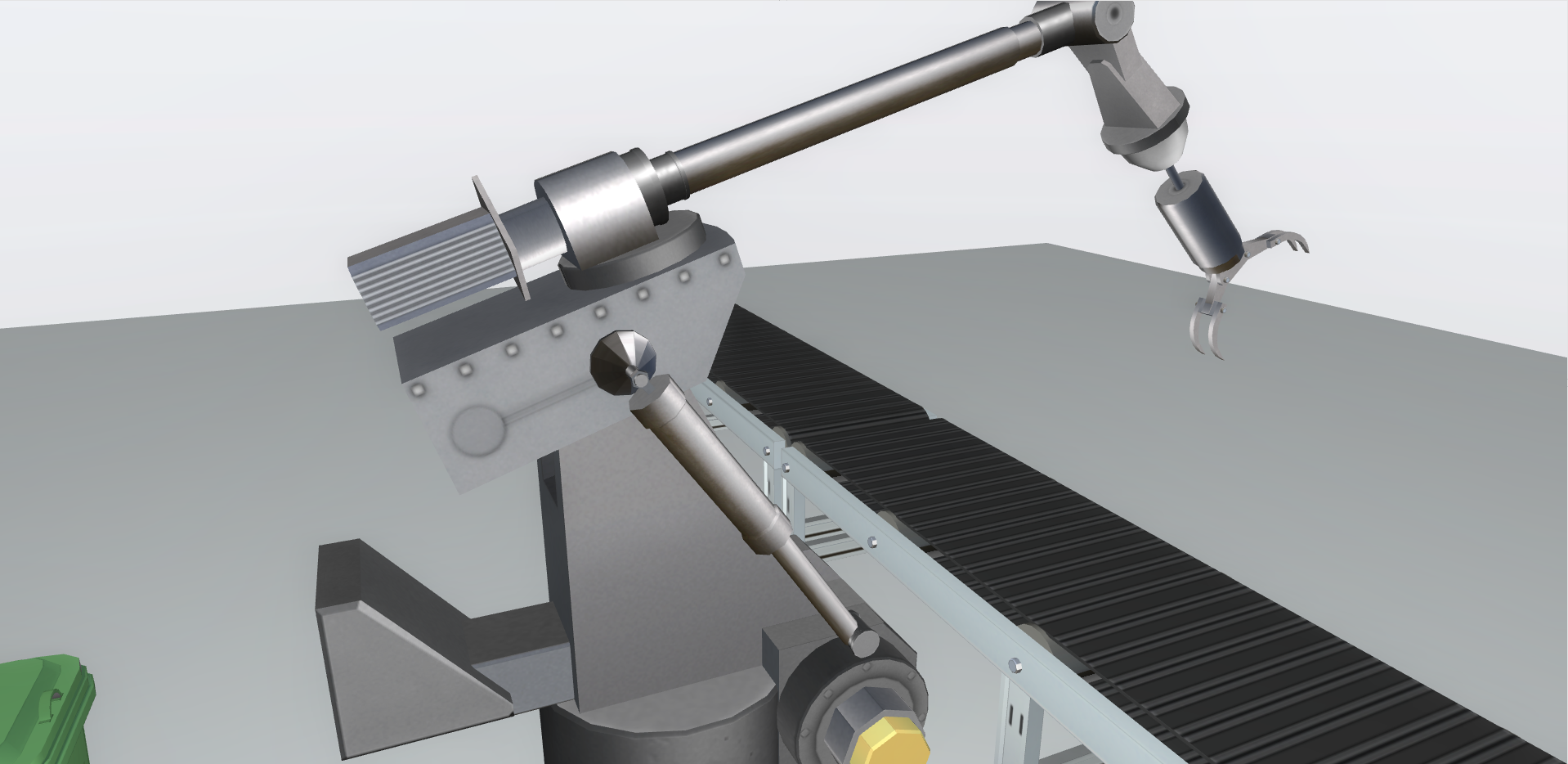
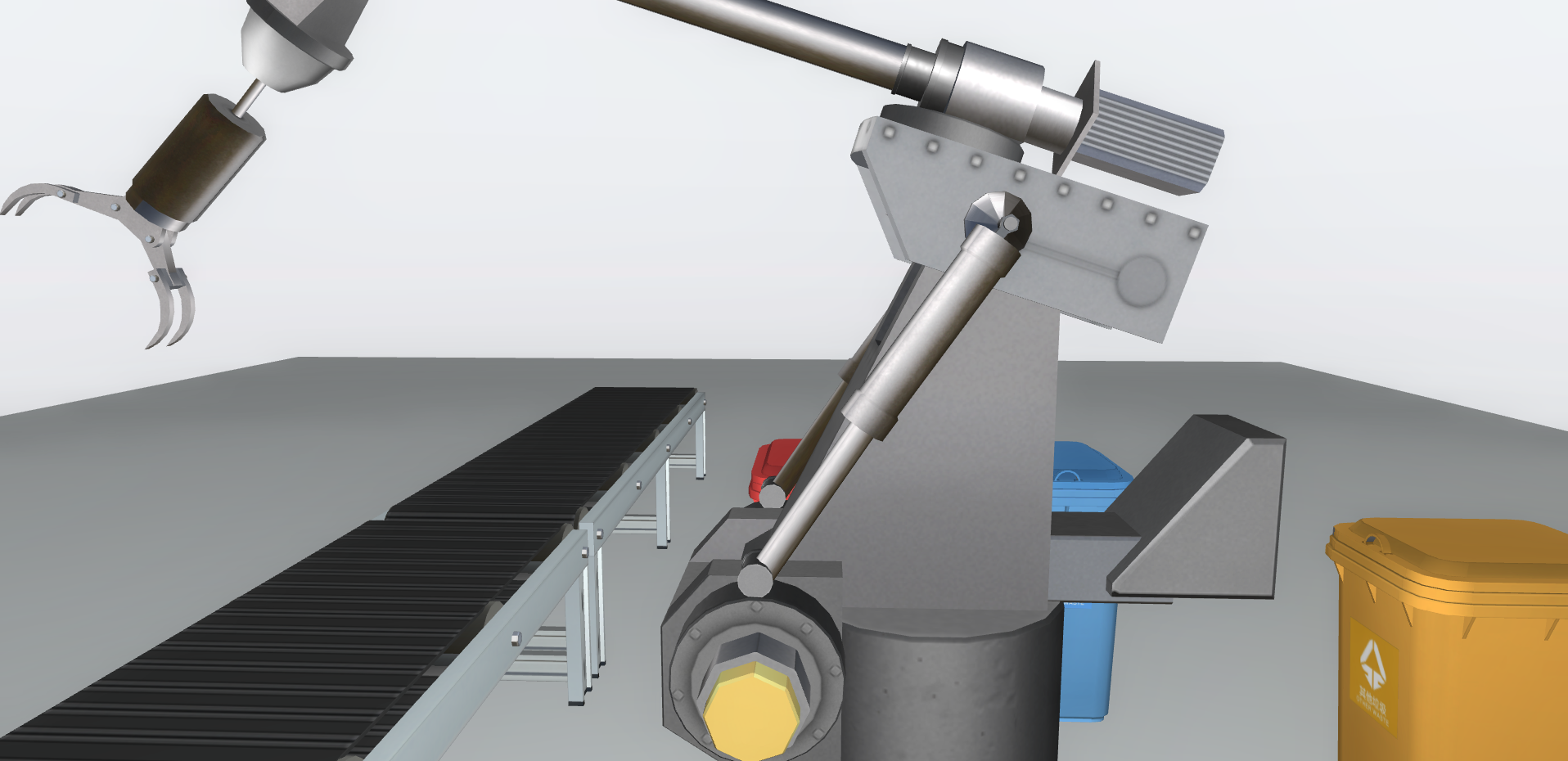
这里面的拾取垃圾步骤还应用了我过去介绍过的 吸附 功能,这个方法非常的适合抓取物体的动作,通过 setHost 使节点吸附于宿主,这样就相当于子节点跟随父节点移动,此时只需要对机械臂进行偏移和旋转的操作,垃圾便会随之一起运动了,大大减少了工作量!
还有一部分更酷的属性设置给大家展示一下,可以让 3D 场景整体有更真实的阴影处理效果。首先我们要注意将无关的节点阴影通过 node.s('shadow.cast', false) 关闭,比如编组用的box,背景,地板和面板等。
最后我们就把阴影的细节做下调整,达到比较好的效果:
gv.enableShadow(true, {
degreeX : 0, // 投影 x 轴角度
degreeZ : -25, // 投影 z 轴角度
intensity : 0.3, // 阴影强度, 1 为黑色
quality : 'high', // low / medium / high / ultra / 4096数值, 质量
type : 'soft', // none / hard / soft
radius : 0.2, // type 为 hard / soft 时,补充的边缘厚度,用来提供更柔和的边缘
bias : -0.003 // 深度浮点偏差补足
})
总结
更多动画 demo 以及工业化领域的文章请继续关注我的博客,感谢大家的支持!
医疗站(https://www.cnblogs.com/htdaydayup/p/11558748.html)
在工业物联网从婴儿走到青年的成熟道路上,一定会有更多的潜力和挑战在等着我们,等待我们去开发,等待我们去创造!相信我们的技术成为国际水准会指日可待!同时在十一国庆后的第一个工作日祝大家精神饱满,工作顺利!
基于 HTML5 WebGL 的垃圾分类系统的更多相关文章
- 基于 HTML5 WebGL 的地铁站 3D 可视化系统
前言 工业互联网,物联网,可视化等名词在我们现在信息化的大背景下已经是耳熟能详,日常生活的交通,出行,吃穿等可能都可以用信息化的方式来为我们表达,在传统的可视化监控领域,一般都是基于 Web SCAD ...
- 基于 HTML5 WebGL 的计量站三维可视化监控系统 Web 组态工控应用
得益于 HTML5 WebGL 技术的成熟,从技术上对工控管理的可视化,数据可视化变得简单易行!完成对工控设备的管理效率,资源管理,风险管理等的大幅度提高,同时也对国家工业4.0计划作出有力响应! 如 ...
- 基于 HTML5 + WebGL 实现 3D 可视化地铁系统
前言 工业互联网,物联网,可视化等名词在我们现在信息化的大背景下已经是耳熟能详,日常生活的交通,出行,吃穿等可能都可以用信息化的方式来为我们表达,在传统的可视化监控领域,一般都是基于 Web SCAD ...
- 基于 HTML5 + WebGL 实现 3D 挖掘机系统
前言 在工业互联网以及物联网的影响下,人们对于机械的管理,机械的可视化,机械的操作可视化提出了更高的要求.如何在一个系统中完整的显示机械的运行情况,机械的运行轨迹,或者机械的机械动作显得尤为的重要,因 ...
- 基于 HTML5 + WebGL 的地铁 3D 可视化系统
前言 工业互联网,物联网,可视化等名词在我们现在信息化的大背景下已经是耳熟能详,日常生活的交通,出行,吃穿等可能都可以用信息化的方式来为我们表达,在传统的可视化监控领域,一般都是基于 Web SCAD ...
- 基于 HTML5 WebGL 与 WebVR 3D 虚实现实的可视化培训系统
前言 2019 年 VR, AR, XR, 5G, 工业互联网等名词频繁出现在我们的视野中,信息的分享与虚实的结合已经成为大势所趋,5G 是新一代信息通信技术升级的重要方向,工业互联网是制造业转型升级 ...
- 基于 HTML5 WebGL + WebVR 的 3D 虚实现实可视化培训系统
前言 2019 年 VR, AR, XR, 5G, 工业互联网等名词频繁出现在我们的视野中,信息的分享与虚实的结合已经成为大势所趋,5G 是新一代信息通信技术升级的重要方向,工业互联网是制造业转型升级 ...
- 基于 HTML5 WebGL + WebVR 的 3D 虚实现实可视化系统
前言 2019 年 VR, AR, XR, 5G, 工业互联网等名词频繁出现在我们的视野中,信息的分享与虚实的结合已经成为大势所趋,5G 是新一代信息通信技术升级的重要方向,工业互联网是制造业转型升级 ...
- 基于 HTML5 WebGL 的虚拟现实可视化培训系统
前言 2019 年 VR, AR, XR, 5G, 工业互联网等名词频繁出现在我们的视野中,信息的分享与虚实的结合已经成为大势所趋,5G 是新一代信息通信技术升级的重要方向,工业互联网是制造业转型升级 ...
随机推荐
- NLP(十二)指代消解
代词是用来代替重复出现的名词 例句: 1.Ravi is a boy. He often donates money to the poor. 先出现主语,后出现代词,所以流动的方向从左到右,这类句子 ...
- Navicat for mysql建立连接
1. 安装Navicat for MySQL. 2. 点击连接->MySQL,打开SSH,填写主机名.端口.用户名.密码. 3. 连接->打开常规,设置连接名(可以自由指定).主机名.端口 ...
- testlink+vertrigoServ搭建测试用例管理系统
1.testlink简介 Testlink是一个开源的基于web的测试用例管理系统,主要功能是测试用例的创建.管理和执行,并且提供了一些简单的统计功能. 目前的公司没有专用的测试用例管理系统,为了测试 ...
- HDU4614Vases and Flowers 二分+线段树;
参考:https://blog.csdn.net/ophunter_lcm/article/details/9879495 题意: 有n个花瓶,有两种操作,1.从a开始放b朵花,有花的花瓶跳过,2 ...
- manacher --- 暂 旧版本
#include<bits/stdc++.h> using namespace std; ; ]; int n; ]; void manacher() { memset(len, , si ...
- codeforces 799 C. Fountains(二分+思维)
题目链接:http://codeforces.com/contest/799/problem/C 题意:要求造2座fountains,可以用钻石,也可以用硬币来造,但是能用的钻石有限,硬币也有限,问能 ...
- Redis与Queue
Redis有多种数据结构,适合多种不同的应用场景 1. 使用Redis做缓存 Redis的字符串.哈希表两种数据结构适合用来储存大量的键值对信息,从而实现高速缓存. 2. 使用Redis做队列 Red ...
- .NetCore技术研究-ConfigurationManager在单元测试下的坑
最近在将原有代码迁移.NET Core, 代码的迁移基本很快,当然也遇到了不少坑,重构了不少,后续逐步总结分享给大家.今天总结分享一下ConfigurationManager遇到的一个问题. 先说一下 ...
- (转)为什么HashMap中链表长度超过8会转换成红黑树
原博地址:https://blog.csdn.net/xingfei_work/article/details/79637878 HashMap在jdk1.8之后引入了红黑树的概念,表示若桶中链表元素 ...
- Linux Shell 基础知识(一)
1. 本文知识结构 2. shell 基础知识 2.1 shell 简单介绍 GNU bash shell 能提供对 Linux 系统的交互式访问,一般来说,使用快捷键 Ctrl + Alt + ...