【STM32H7教程】第26章 STM32H7的TCM,SRAM等五块内存的超方便使用方式
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第26章 STM32H7的TCM,SRAM等五块内存的超方便使用方式
本章教程为大家分享一种快捷的DTCM,SRAM1,SRAM2,SRAM3和SRAM4的使用方式。MDK和IAR均支持这种方式。
26.1 初学者重要提示
26.2 MDK分散加载方式管理多块内存区方法
26.3 MDK分散加载文件解读
26.4 IAR的ICF文件设置
26.5 实验例程说明(MDK)
26.6 实验例程说明(IAR)
26.7 总结
26.1 初学者重要提示
- 学习本章节前,务必优先学习第25章,了解TCM,SRAM等五块内存区的基础知识,比较重要。
- 本章的管理方式比较容易实现,仅需添加一个分散加载文件即可,对应的分散加载内容也比较好理解。
26.2 MDK分散加载方式管理多块内存区方法
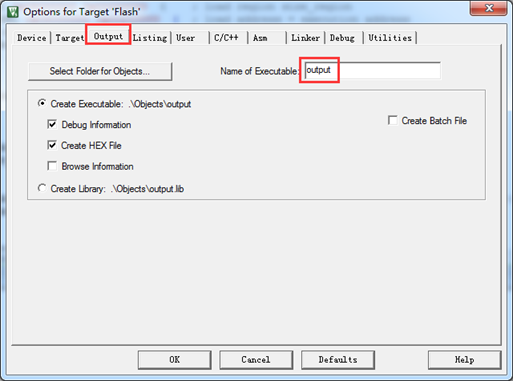
默认情况下,我们都是通过MDK的option选项设置Flash和RAM大小:

这种情况下,所有管理工作都是编译来处理的。针对这个配置,在路径\Project\MDK-ARM(uV5)\Objects(本教程配套例子的路径)里面会自动生成一个后缀为sct的文件output.sct。文件名由下面这个选项决定的:
output.sct文件生成的内容如下:
; *************************************************************
; *** Scatter-Loading Description File generated by uVision ***
; ************************************************************* LR_IROM1 0x08000000 0x00200000 { ; load region size_region
ER_IROM1 0x08000000 0x00200000 { ; load address = execution address
*.o (RESET, +First)
*(InRoot$$Sections)
.ANY (+RO)
.ANY (+XO)
}
RW_IRAM1 0x20000000 0x00020000 { ; RW data
.ANY (+RW +ZI)
}
}
不方便用户将变量定义到指定的CCM 或者SDRAM中。而使用__attribute__指定具体地址又不方便管理。
针对这种情况,使用一个脚本文件即可解决,脚本定义如下:
LR_IROM1 0x08000000 0x00200000 { ; load region size_region
ER_IROM1 0x08000000 0x00200000 { ; load address = execution address
*.o (RESET, +First)
*(InRoot$$Sections)
.ANY (+RO)
}
; RW data - 128KB DTCM
RW_IRAM1 0x20000000 0x00020000 {
.ANY (+RW +ZI)
}
; RW data - 512KB AXI SRAM
RW_IRAM2 0x24000000 0x00080000 {
*(.RAM_D1)
}
; RW data - 128KB SRAM1(0x30000000) + 128KB SRAM2(0x3002 ) + 32KB SRAM3(0x30040000)
RW_IRAM3 0x30000000 0x00048000 {
*(.RAM_D2)
}
; RW data - 64KB SRAM4(0x38000000)
RW_IRAM4 0x38000000 0x00010000 {
*(.RAM_D3)
}
}
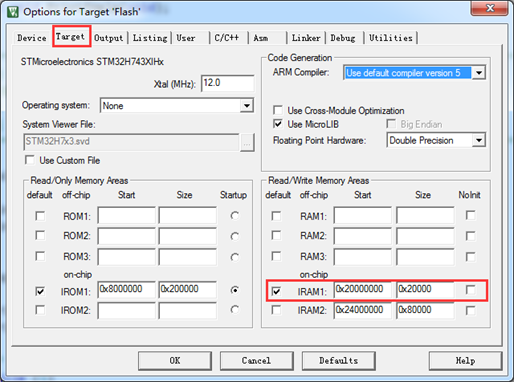
同时配置option的链接选项使用此分散加载文件:

使用方法很简单,依然是使用__attribute__,但是不指定具体地址了,指定RAM区,方法如下,仅需加个前缀即可:
/* 定义在512KB AXI SRAM里面的变量 */
__attribute__((section (".RAM_D1"))) uint32_t AXISRAMBuf[];
__attribute__((section (".RAM_D1"))) uint16_t AXISRAMCount; /* 定义在128KB SRAM1(0x30000000) + 128KB SRAM2(0x30020000) + 32KB SRAM3(0x30040000)里面的变量 */
__attribute__((section (".RAM_D2"))) uint32_t D2SRAMBuf[];
__attribute__((section (".RAM_D2"))) uint16_t D2SRAMount; /* 定义在64KB SRAM4(0x38000000)里面的变量 */
__attribute__((section (".RAM_D3"))) uint32_t D3SRAMBuf[];
__attribute__((section (".RAM_D3"))) uint16_t D3SRAMCount;
26.3 MDK分散加载文件解读
这里将分散加载文件的内容为大家做个解读,方便以后自己修改:
. LR_IROM1 0x08000000 0x00200000 { ; load region size_region
. ER_IROM1 0x08000000 0x00200000 { ; load address = execution address
. *.o (RESET, +First)
. *(InRoot$$Sections)
. .ANY (+RO)
. }
.
. ; RW data - 128KB DTCM
. RW_IRAM1 0x20000000 0x00020000 {
. .ANY (+RW +ZI)
. }
.
. ; RW data - 512KB AXI SRAM
. RW_IRAM2 0x24000000 0x00080000 {
. *(.RAM_D1)
. }
.
. ; RW data - 128KB SRAM1(0x30000000) + 128KB SRAM2(0x3002 ) + 32KB SRAM3(0x30040000)
. RW_IRAM3 0x30000000 0x00048000 {
. *(.RAM_D2)
. }
.
. ; RW data - 64KB SRAM4(0x38000000)
. RW_IRAM4 0x38000000 0x00010000 {
. *(.RAM_D3)
. }
. }
- 第1 – 2行,LR_IROM1是Load Region加载域,ER_IROM1是Execution Region执行域。首地址都是0x0800 0000,大小都是0x0020 0000,即STM32H7的Flash地址和对应大小。
加载域就是程序在Flash中的实际存储,而运行域是芯片上电后的运行状态,通过下面的框图可以有一个感性的认识:
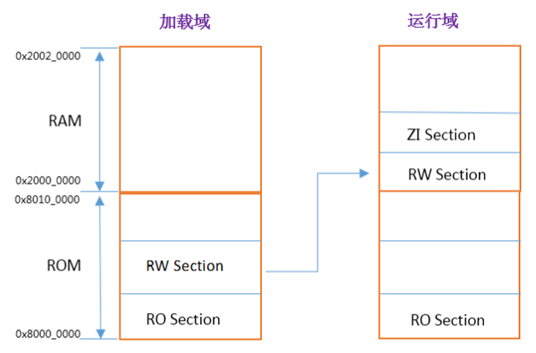
通过上面的框图可以看出,RW区也是要存储到ROM/Flash里面的,在执行映像之前,必须将已初始化的 RW 数据从 ROM 中复制到 RAM 中的执行地址并创建ZI Section(初始化为0的变量区)。
- 第3行的*.o (RESET, +First)
在启动文件startup_stm32h743xx.s有个段名为RESET的代码段,主要存储了中断向量表。这里是将其存放在Flash的首地址。
- 第4行的*(InRoot$$Sections)
这里是将MDK的一些库文件全部放在根域,比如__main.o, _scatter*.o, _dc*.o。
- 第5行.ANY (+RO)
将目标文件中所有具有RO只读属性的数据放在这里,即ER_IROM1。
- 第9-11行,RW_IRAM1是执行域,配置的是DTCM,首地址0x2000 0000,大小128KB。
将目标文件中所有具有RW和ZI数据放在这里。
- 第14-16行,RW_IRAM2是执行域,配置的是AXI SRAM,首地址0x24000000,大小512KB。
给这个域专门配了一个名字 .RAM_D1。这样就可以通过__attribute__((section("name")))将其分配到这个RAM域。
- 第19-21行,RW_IRAM3是执行域,配置的是D2域的SRAM1,SRAM2和SRAM3,首地址0x30000000,共计大小288KB。给这个域专门配了一个名字 .RAM_D2。这样就可以通过__attribute__((section("name")))将其分配到这个RAM域。
- 第24-26行,RW_IRAM3是执行域,配置的是D3域的SRAM4,首地址0x38000000,共计大小64KB。给这个域专门配了一个名字 .RAM_D3。这样就可以通过__attribute__((section("name")))将其分配到这个RAM域。
26.4 IAR的ICF文件设置
IAR相比MDK的设置要简单一些,仅需在IAR的配置文件stm32h743xx_flash.icf中添加如下代码即可:
define region RAM_D1_region = mem:[from 0x24000000 to 0x24080000];
define region RAM_D2_region = mem:[from 0x30000000 to 0x30048000];
define region RAM_D3_region = mem:[from 0x38000000 to 0x38010000];
place in RAM_D1_region {section .RAM_D1};
place in RAM_D2_region {section .RAM_D2};
place in RAM_D3_region {section .RAM_D3};
用户的使用方法如下:
/* 定义在512KB AXI SRAM里面的变量 */
#pragma location = ".RAM_D1"
uint32_t AXISRAMBuf[];
#pragma location = ".RAM_D1"
uint16_t AXISRAMCount; /* 定义在128KB SRAM1(0x30000000) + 128KB SRAM2(0x30020000) + 32KB SRAM3(0x30040000)里面的变量 */
#pragma location = ".RAM_D2"
uint32_t D2SRAMBuf[];
#pragma location = ".RAM_D2"
uint16_t D2SRAMount; /* 定义在64KB SRAM4(0x38000000)里面的变量 */
#pragma location = ".RAM_D3"
uint32_t D3SRAMBuf[];
#pragma location = ".RAM_D3"
uint16_t D3SRAMCount;
26.5 实验例程说明(MDK)
配套例子:
V7-005_TCM,SRAM等五块内存的超方便使用方式
实验目的:
- 学习TCM,SRAM等五块内存的超方便使用方式。
实验内容:
- 启动自动重装软件定时器0,每100ms翻转一次LED2。
实验操作:
- K1键按下,操作AXI SRAM。
- K2键按下,操作D2域的SRAM1,SRAM2和SRAM3。
- K3键按下,操作D3域的SRAM4。
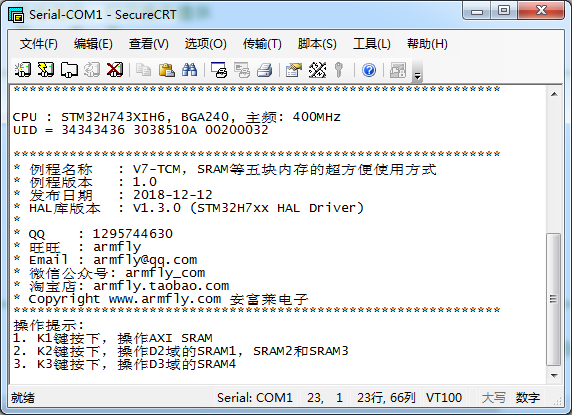
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
系统栈大小分配:

RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config(); /* 使能L1 Cache */
CPU_CACHE_Enable(); /*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init(); /*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config(); /*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。
AXI SRAM的MPU属性:
Write back, Read allocate,Write allocate。
FMC的扩展IO的MPU属性:
必须Device或者Strongly Ordered。
D2 SRAM1,SRAM2和SRAM3的MPU属性:
Write through, read allocate,no write allocate。
D3 SRAM4的MPU属性:
Write through, read allocate,no write allocate。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */
HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM1的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x30000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_128KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER2;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM2的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x30020000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_128KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER3;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM3的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x30040000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_32KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER4;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM4的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x38000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER5;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
} /*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache(); /* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主功能的实现主要分为两部分:
- 启动自动重装软件定时器0,每100ms翻转一次LED2。
- K1键按下,操作AXI SRAM。
- K2键按下,操作D2域的SRAM1,SRAM2和SRAM3。
- K3键按下,操作D3域的SRAM4
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: c程序入口
* 形 参: 无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int main(void)
{
uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */
PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(, ); /* 启动1个100ms的自动重装的定时器 */ AXISRAMCount = ;
D2SRAMount = ;
D3SRAMCount = ; /* 进入主程序循环体 */
while ()
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔100ms 进来一次 */
bsp_LedToggle();
} /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下,操作AXI SRAM */
AXISRAMBuf[] = AXISRAMCount++;
AXISRAMBuf[] = AXISRAMCount++;
AXISRAMBuf[] = AXISRAMCount++;
printf("K1键按下, AXISRAMBuf[0] = %d, AXISRAMBuf[5] = %d, AXISRAMBuf[9] = %d\r\n",
AXISRAMBuf[],
AXISRAMBuf[],
AXISRAMBuf[]);
break; case KEY_DOWN_K2: /* K2键按下,操作D2域的SRAM1,SRAM2和SRAM3 */
D2SRAMBuf[] = D2SRAMount++;
D2SRAMBuf[] = D2SRAMount++;
D2SRAMBuf[] = D2SRAMount++;
printf("K2键按下, D2SRAMBuf[0] = %d, D2SRAMBuf[5] = %d, D2SRAMBuf[9] = %d\r\n",
D2SRAMBuf[],
D2SRAMBuf[],
D2SRAMBuf[]);
break; case KEY_DOWN_K3: /* K3键按下,操作D3域的SRAM4 */
D3SRAMBuf[] = D3SRAMCount++;
D3SRAMBuf[] = D3SRAMCount++;
D3SRAMBuf[] = D3SRAMCount++;
printf("K3键按下, D3SRAMBuf[0] = %d, D3SRAMBuf[5] = %d, D3SRAMBuf[9] = %d\r\n",
D3SRAMBuf[],
D3SRAMBuf[],
D3SRAMBuf[]);
break; default:
/* 其它的键值不处理 */
break;
}
}
}
}
26.6 实验例程说明(IAR)
配套例子:
V7-005_TCM,SRAM等五块内存的超方便使用方式
实验目的:
- 学习TCM,SRAM等五块内存的超方便使用方式。
实验内容:
- 启动自动重装软件定时器0,每100ms翻转一次LED2。
实验操作:
- K1键按下,操作AXI SRAM。
- K2键按下,操作D2域的SRAM1,SRAM2和SRAM3。
- K3键按下,操作D3域的SRAM4。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
系统栈大小分配:

RAM空间用的DTCM:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config(); /* 使能L1 Cache */
CPU_CACHE_Enable(); /*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init(); /*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config(); /*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。
AXI SRAM的MPU属性:
Write back, Read allocate,Write allocate。
FMC的扩展IO的MPU属性:
必须Device或者Strongly Ordered。
D2 SRAM1,SRAM2和SRAM3的MPU属性:
Write through, read allocate,no write allocate。
D3 SRAM4的MPU属性:
Write through, read allocate,no write allocate。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */
HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM1的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x30000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_128KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER2;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM2的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x30020000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_128KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER3;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM3的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x30040000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_32KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER4;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置SRAM4的属性为Write through, read allocate,no write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x38000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER5;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
} /*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache(); /* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主功能的实现主要分为两部分:
- 启动自动重装软件定时器0,每100ms翻转一次LED2。
- K1键按下,操作AXI SRAM。
- K2键按下,操作D2域的SRAM1,SRAM2和SRAM3。
- K3键按下,操作D3域的SRAM4
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: c程序入口
* 形 参: 无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int main(void)
{
uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */
PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(, ); /* 启动1个100ms的自动重装的定时器 */ AXISRAMCount = ;
D2SRAMount = ;
D3SRAMCount = ; /* 进入主程序循环体 */
while ()
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔100ms 进来一次 */
bsp_LedToggle();
} /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下,操作AXI SRAM */
AXISRAMBuf[] = AXISRAMCount++;
AXISRAMBuf[] = AXISRAMCount++;
AXISRAMBuf[] = AXISRAMCount++;
printf("K1键按下, AXISRAMBuf[0] = %d, AXISRAMBuf[5] = %d, AXISRAMBuf[9] = %d\r\n",
AXISRAMBuf[],
AXISRAMBuf[],
AXISRAMBuf[]);
break; case KEY_DOWN_K2: /* K2键按下,操作D2域的SRAM1,SRAM2和SRAM3 */
D2SRAMBuf[] = D2SRAMount++;
D2SRAMBuf[] = D2SRAMount++;
D2SRAMBuf[] = D2SRAMount++;
printf("K2键按下, D2SRAMBuf[0] = %d, D2SRAMBuf[5] = %d, D2SRAMBuf[9] = %d\r\n",
D2SRAMBuf[],
D2SRAMBuf[],
D2SRAMBuf[]);
break; case KEY_DOWN_K3: /* K3键按下,操作D3域的SRAM4 */
D3SRAMBuf[] = D3SRAMCount++;
D3SRAMBuf[] = D3SRAMCount++;
D3SRAMBuf[] = D3SRAMCount++;
printf("K3键按下, D3SRAMBuf[0] = %d, D3SRAMBuf[5] = %d, D3SRAMBuf[9] = %d\r\n",
D3SRAMBuf[],
D3SRAMBuf[],
D3SRAMBuf[]);
break; default:
/* 其它的键值不处理 */
break;
}
}
}
}
26.7 总结
本章节为大家介绍的方案比较实用,建议在实际项目中多用用,从而熟练掌握。
【STM32H7教程】第26章 STM32H7的TCM,SRAM等五块内存的超方便使用方式的更多相关文章
- 【STM32H7教程】第27章 STM32H7的TCM,SRAM等五块内存的动态内存分配实现
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第27章 STM32H7的TCM,SRAM等五块内 ...
- 【STM32H7教程】第25章 STM32H7的TCM,SRAM等五块内存基础知识
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第25章 STM32H7的TCM,SRAM等五块内 ...
- 【STM32H7教程】第28章 STM32H7时间关键代码在ITCM执行的超简单方法
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第28章 STM32H7时间关键代码在ITCM执行 ...
- 【STM32H7教程】第12章 STM32H7的HAL库框架设计学习
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第12章 STM32H7的HAL库框架设计学 ...
- 【安富莱STM32H7教程】第1章 初学STM32H7的准备工作
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第1章 初学STM32H7的准备工作 俗话说万事开头 ...
- 【STM32H7教程】第60章 STM32H7的DAC应用之定时器触发实现DMA方式双通道波形
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第60章 STM32H7的DAC应用之定时器触发实 ...
- 【STM32H7教程】第8章 STM32H7的终极调试组件Event Recorder
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第8章 STM32H7的终极调试组件Event Re ...
- 【STM32H7教程】第9章 STM32H7重要知识点数据类型,变量和堆栈
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第9章 STM32H7重要知识点数据类型,变量和堆栈 ...
- 【STM32H7教程】第3章 STM32H7整体把控
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第3章 STM32H7整体把控 初学STM32H7一 ...
随机推荐
- MYSQL5.7 INDEXES之如何使用索引(一)
Most MySQL indexes (PRIMARY KEY, UNIQUE, INDEX, and FULLTEXT) are stored in B-trees. Exceptions: Ind ...
- Node.js实现图片上传功能
node接口实现 const express = require('express') const mysql = require('mysql') const cors = require('cor ...
- MySQL 优化 (三)
参数优化 query_cache_size (1) 简介: 查询缓存简称QC,使用查询缓冲,mysql将查询结果存放在缓冲区中,今后对于同样的select语句(区分大小写),将直接从缓冲区中读取结果. ...
- js中获取当前url路径
可以使用 window.location 获取当前页面url.以下是一些简单应用. <script> $(function(){ // 返回 web 主机的域名,如:http://127. ...
- JavaScript Array filter() 方法
JavaScript Array filter() 方法 var ages = [32, 33, 16, 40]; function checkAdult(age) { return age > ...
- java自学-类与对象
1.面向对象和面向过程 java是一种面向对象的程序设计语言,而面向对象思想是一种程序设计思想. 这里的对象泛指现实中一切事物,每种事物都具备自己的属性和行为.面向对象思想就是在计算机程序设计过程中, ...
- InnoSetup 根据选择的安装语言显示不同语言的(协议)License和更新说明
需求 在安装时,选择中文安装,显示中文版协议(License)文件. 在安装时,选择英文安装,显示英文版协议(License)文件. 解决 [Languages] 段中有LicenseFile属性和I ...
- Java学习 1.2——简述JVM,JRE,JDK的关系
在上一节中,我们了解了JVM相关的知识,有兴趣的话可以先去看一下: Java学习 1.1——(JVM介绍)Java为什么能够跨平台? 这个篇主要分享的是JRE,JDK,JVM三者的区别,简言之: JD ...
- 看完这篇文章,我奶奶都知道什么是JVM中的内存模型与垃圾回收!
扩展阅读:JVM从入门开始深入每一个底层细节 六.内存模型 6.1.内存模型与运行时数据区 Java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干不同数据区域. Java内存模型的主要目 ...
- 使用adb命令操控Android手机(adb命令)
1) 手机连接电脑之前 首先,查看安卓手机是否已经连接上电脑 adb devices 让adb一直查找安卓设备,找到后才停止 adb wait-for-device 2) 手机连接电脑后的操作 2.0 ...