Understanding about numerical stability, convergence and consistency
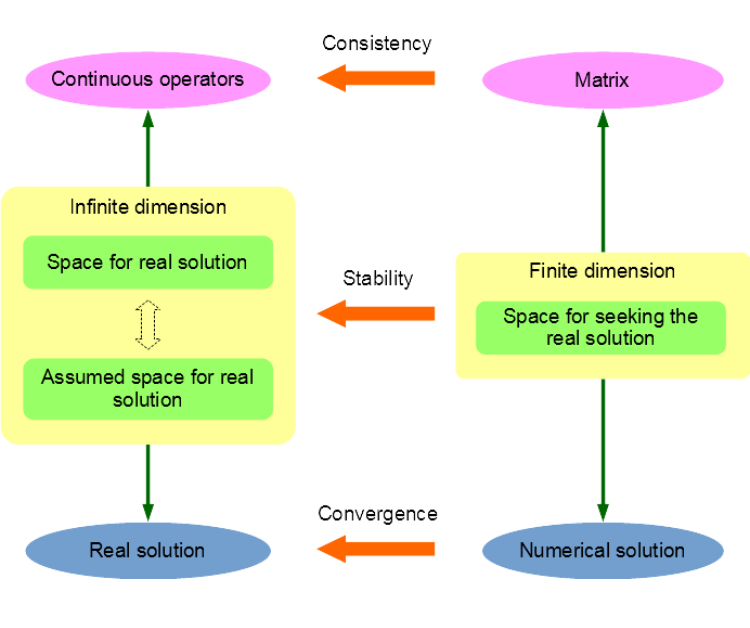
In a computer simulation of the real world, physical quantities, which usually have continuous distributions governed by partial differential equations (PDEs), can be solved by numerical methods such as finite element method (FEM) and boundary element method (BEM). Whether the obtained solution is a good approximation of the reality and whether the numerical schemes can proceed properly under perturbations of different error sources, such as numerical quadrature error and round-off error, should be clarified before any code implementation. To answer these questions, this post will introduce the fundamental concepts of numerical stability, convergence and consistency according to the following figure.
Let \(u\) be the real solution of the following general variational problem for a PDE:
\[
\text{Solve $u \in U$: } a(u, v) = (f, v) \quad (\forall v \in W),
\]
where both \(U\) and \(W\) are Hilbert spaces, \(a(\cdot, \cdot): U \times W \rightarrow \mathbb{K}\) with \(\mathbb{K} \in \{\mathbb{R}, \mathbb{C}\}\) is a sesquilinear or bilinear form and \(f: W \rightarrow \mathbb{K}\) is a continuous linear functional on \(W\). The solution \(u\) belongs to the space \(U\) of continuous functions with infinite dimension. For ease of further analysis, priori assumption is usually adopted for such function space thus we have the assumed function space \(V\). For example, the countably normed spaces \(V = B_{\varrho}(\Gamma)\) used in the \(hp\)-BEM is defined as
\[
B_{\varrho}(\Gamma) = \{ v \in L^2(\Gamma): v \circ \kappa_K \in B_{\varrho}(K_0) \},
\]
where
- \(\Gamma\) is the boundary manifold of the solution domain, which is covered by the mesh \(\{K_i\}_{i=1}^{N_M}\) with \(N_M\) as the number of mesh elements;
- \(K_0\) is the reference cell and \(K\) is the real cell which may be curved;
- \(\kappa_K: K_0 \rightarrow K\) is the mapping from the reference cell to the real cell;
- \(B_{\varrho}(K_0)\) is the countably normed space restricted on the reference cell, which has constraints on the norm of all the derivatives of \(v\). Its formulation is given as below:
\[
B_{\varrho}(K_0) = \big\{ v \in L^2(K_0): \Norm{r_X^{k - \varrho} \left( \Pd{}{r_X} \right)^k \left( \vartheta (\alpha_X - \vartheta_X) \right)^{l - \varrho} \left( \Pd{}{\vartheta_X} \right)^l v}_{L^2(U_X)} \leq C d^{k+l+1} k! l!\big\},
\]
for which I do not provide more explanation in this post, but just give you an impression that the construction of the assumed solution function space can be quite complicated.
To solve the PDE on a computer, a finite dimensional subspace \(V^L\) of \(V\) must be constructed, in which a solution is to be sought as an approximation of the real solution by using some sort of numerical method. Then the stability condition means, for any function \(u\) in the real space \(U\) or the assumed space \(V\) of infinite dimension, whether there exists a function \(v\) in the finite dimensional space \(V^L\), such that the norm of their difference can be controlled to be arbitrarily small as \(N_L\), the dimension of space \(V^L\), increases. For example, in the \(hp\)-BEM, a subspace \(V^L\) can be constructed to have the following exponential stability condition:
\[
\begin{equation}
\label{eq:stability-condition}
\forall u \in B_{\varrho}(\Gamma): \inf_{v \in V^L} \norm{u - v}_{L^2(\Gamma)} \leq C \exp(-b N_L^{1/4}).
\end{equation}
\]
Once the solution \(u^L \in V^L\) for the finite dimensional problem is obtained from a general method such as the Galerkin method, i.e.
\[
\text{Solve $u^L \in V^L$: } a(u^L, v) = (f, v) \quad (\forall v \in V^L),
\]
the concept of convergence comes into play, which ensures that the difference between this \(u^L\) and the real solution \(u\) can be controlled. For example, if the following condition can be satisfied:
\[
\Norm{P_L A u^L} \geq C_s \Norm{u^L} \quad (\forall u^L \in V^L),
\]
where \(P_L: V \rightarrow V^L\) is the projection operator, \(A: V^L \rightarrow (V^L)'\) is the associated operator of the sesquilinear or bilinear form \(a(\cdot, \cdot)\) and \(C_s > 0\) is a constant, it can be proved that the solution obtained from the Galerkin method satisfies
\[
\begin{equation}
\label{eq:convergence-condition}
\norm{u - u^L} \leq C \inf_{v \in V^L} \Norm{u - v}.
\end{equation}
\]
This means the real solution can be properly approximated by the Galerkin solution with the error norm controlled by the approximation capability of the adopted finite dimensional space \(V^L\), and we say the method is convergent. In addition, combing equation \eqref{eq:stability-condition} and \eqref{eq:convergence-condition}, we know the solution has the exponential convergence property:
\[
\begin{equation}
\label{eq:exponential-convergence}
\norm{u - u^L} \leq C \exp(-b N_L^{1/4}).
\end{equation}
\]
Finally, we introduce the concept of consistency. During the discretization of the problem, the sesquilinear or bilinear form \(a(\cdot, \cdot)\), or rather, its associated operator \(A\), is to be approximated by its discrete version, i.e. the stiffness matrix \(A^L\). The evaluation of \(A^L\)'s coefficients usually needs numerical quadrature techniques, which introduces additional numerical error. Even though there is an analytical formula for integration, round-off error limited by the finite computer byte length is unavoidable. Hence, an operator \(\tilde{A}^L\) is obtained being different from \(A^L\). The error between \(A^L\) and \(\tilde{A}^L\) will perturb the adopted numerical method. If the error between the real and numerical solutions \(\Norm{u - \tilde{u}^L}\) can still be controlled, we say the method is consistent. For example, in the \(hp\)-BEM, if the stiffness matrix coefficient error satisfies the following consistent condition
\[
\abs{A^L_{ij} - \tilde{A}^L_{ij}} < \Phi(L) \quad (i,j = 1, \cdots, N_L)
\]
with
\[
\lim_{L \rightarrow \infty} N_L \Phi(L) = 0 \; \text{and} \; \Phi(L) = N_L^{-1} L \sigma^{\varrho L},
\]
the exponential convergence as shown in \eqref{eq:exponential-convergence} can be preserved.
Understanding about numerical stability, convergence and consistency的更多相关文章
- Softmax vs. Softmax-Loss VS cross-entropy损失函数 Numerical Stability(转载)
http://freemind.pluskid.org/machine-learning/softmax-vs-softmax-loss-numerical-stability/ 卷积神经网络系列之s ...
- Softmax vs. Softmax-Loss: Numerical Stability
http://freemind.pluskid.org/machine-learning/softmax-vs-softmax-loss-numerical-stability/ softmax 在 ...
- Understanding Convolution in Deep Learning
Understanding Convolution in Deep Learning Convolution is probably the most important concept in dee ...
- [C4] Andrew Ng - Improving Deep Neural Networks: Hyperparameter tuning, Regularization and Optimization
About this Course This course will teach you the "magic" of getting deep learning to work ...
- 【转】Artificial Neurons and Single-Layer Neural Networks
原文:written by Sebastian Raschka on March 14, 2015 中文版译文:伯乐在线 - atmanic 翻译,toolate 校稿 This article of ...
- AP(affinity propagation)研究
待补充…… AP算法,即Affinity propagation,是Brendan J. Frey* 和Delbert Dueck于2007年在science上提出的一种算法(文章链接,维基百科) 现 ...
- 提高神经网络的学习方式Improving the way neural networks learn
When a golf player is first learning to play golf, they usually spend most of their time developing ...
- 【Caffe 测试】Training LeNet on MNIST with Caffe
Training LeNet on MNIST with Caffe We will assume that you have Caffe successfully compiled. If not, ...
- MR for Baum-Welch algorithm
The Baum-Welch algorithm is commonly used for training a Hidden Markov Model because of its superior ...
随机推荐
- 统一门户与业务系统的sso整合技术方案(单点登录)
一.单点登录(SSO,Single Sign On)整合目前计划接入统一门户的所有业务系统均为基于JavaEE技术的B/S架构系统.由于统一门户的单点登录技术选用的是JA-SIG组织开发的Cas Se ...
- FFmpeg configure: rename cuda to ffnvcodec 2018-03-06
FFmpeg version of headers required to interface with Nvidias codec APIs. Corresponds to Video Codec ...
- python笔记---需求文件requirements.txt的创建及使用
/******************************************/ 感谢大家一直以来的关注与支持. 本站迁移至 http://qingkang.me 也欢迎大家继续关注. /** ...
- [加密算法]为什么说RSA难以被破解
RSA算法运用了数学“两个大的质数相乘,难以在短时间内将其因式分解”的这么一套看似简单事实上真的是很困难的一个数学难题...... 以前也接触过RSA加密算法,感觉这个东西太神秘了,是数学家的事,和我 ...
- Boostrap轮图片可以左右滑动
记得引用Boostrap的js和css html代码: <div id="Mycarousel" class="carousel slide col-md-12&q ...
- 洛谷P4827 [国家集训队] Crash 的文明世界 [斯特林数,组合数,DP]
传送门 思路 又见到这个\(k\)次方啦!按照套路,我们将它搞成斯特林数: \[ ans_x=\sum_{i=0}^k i!S(k,i)\sum_y {dis(x,y) \choose i} \] 前 ...
- C#遍历指定文件夹中的所有文件(转)
C#遍历指定文件夹中的所有文件 DirectoryInfo TheFolder=new DirectoryInfo(folderFullName);//遍历文件夹foreach(DirectoryIn ...
- Js:消息弹出框、获取时间区间、时间格式、easyui datebox 自定义校验、表单数据转化json、控制两个日期不能只填一个
(function ($) { $.messageBox = function (message) { $.messager.show({ title:'消息框提示', msg:message, sh ...
- SQLPLUS 命令
定制:sql提示符信息 1.显示SQLPLUS帮助,命令如下:HELP INDEX @ COPY PAUSE SHUTDOWN @@ DEFINE PRINT SPOOL / DEL PROMPT S ...
- linux_OEL5.4_安装Oracle11g中文教程图解
一.安装ORACLE10g 软件(11.2.0.0) 参考pdf:链接:http://pan.baidu.com/s/1pLHU94J 密码:keo8 (一)安装前的包支持 1. 虚拟机yum 环境搭 ...