[TPYBoard-Micropython教程之1] 运行第一个脚本——点亮LED
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604
会python就能做硬件!
一、TPYBoard V102开发板
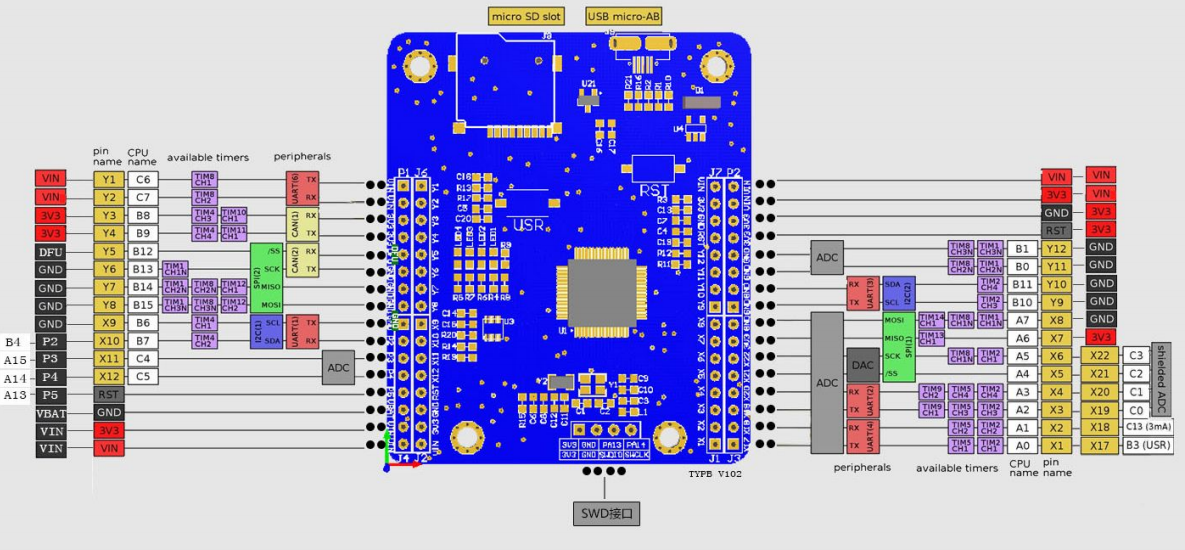
TPYBoard V102开发板MCU使用的是stm32F405RG,存在一个sd卡插槽、4个leds,1个复位按钮,1个通用按钮以及2个I2C,2个SPI和5个USART接口。具体参数见下表:
| STM32F405RG MCU。 |
| 168 MHz Cortex-M4 CPU with 32-bit hardware floating point。 |
| 1 MiB flash storage, 192 KiB RAM。 |
| USB口, 支持 串口,通用存储,HID协议。 |
| SD卡插槽。 |
| MMA76603轴加速度计。 |
| 4 LEDs, 1复位按钮, 1通用按钮。 |
| 3.3V0.3A板载 LDO , 可从USB口或者外置电池供电。 |
| 实时时钟。 |
| 30个通用IO口,其中28个支持5V输入输出。 |
| 2个 SPI接口, 2个 CAN接口, 2个I2C接口, 5个USART接口。 |
| 14个 12-bit ADC引脚。 |
| 2个DAC 引脚。 |
具体引脚如下:
具体实物图如下:
二、开发板的连接方法
程序调试的连接方法:通过 USB 线连接开发板的microusb口与你的 PC 机(windows,mac,linux皆可)的usb口。当连接成功后开发板将上电和进入开机程序,绿色的 LED 灯应该在半秒或更少的时间内亮起,当其熄灭时意味着开机程序已完成。此时,电脑会出现一个u盘设备,容量97K左右。该u盘里存在4个文件:
boot.py 启动文件,确定启动方式,类似引导文件
main.py 主程序,boot.py默认引导启动的程序,也就是你的python代码主要是写在这里。
pybcdc.inf 驱动程序,win7以上基本不需要驱动,个别精简系统需要安装驱动。如果确实需要安装,请参考http://www.micropython.net.cn/support/tutorial/222.html
Readme.txt
使用的连接方法:使用时其实就是给该开发板供电,供电也是用microusb,直接将5V电源通过该口引入,如你可以使用充电宝、pc等具有供电能力的设备,利用usb连接供电。
三、第一个简单程序——点亮板载led3
直接修改main.py文件,代码如下:
# main.py -- put your code here!
import pyb
pyb.LED(3).on()
修改完,点击保存时,板载的第一个灯会亮起,此时一定要等灯熄灭以后,才能按rst键或者是拨出usb。灯亮的过程表示正在存储,因为此时是存在mcu的flash中,所以速度略慢一点。如果后面我们讲了如何使用tf卡后,就会发现不存在这个过程。
重新给板子上电,此时会发现led3亮了。
四、让板载led3闪烁
将main.py改为以下代码:
led = pyb.LED(2)
while True:
led.toggle()
pyb.delay(1000)
再次给板子通电,会发现,led3每秒闪一次。
关键代码分析:
pyb.LED这个类有三个函数:
on( )表示开;
off( ) 表示关;
toggle( )表示闪烁
pyb.delay( ) 仅是一个简单的毫秒级别的延时。pyb.delay(1000)表示1000毫秒。
五、点亮外壳led灯
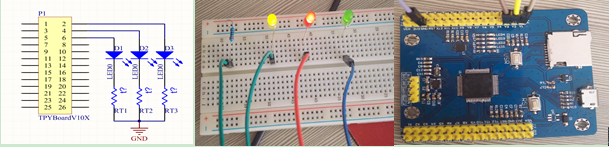
1、硬件连接方法
取三个led灯(红绿黄)分别接在板子对应gpio为Y1、Y2、Y3的口上。如下图:
2、代码
# main.py -- put your code here!
import pyb
led1 = pyb.Pin("Y1",pyb.Pin.OUT_PP)
led2 = pyb.Pin("Y2",pyb.Pin.OUT_PP)
led3 = pyb.Pin("Y3",pyb.Pin.OUT_PP)
While True:
led1.value(1)
led2.value(1)
led3.value(1)
3、实现效果
三个led亮起。
讲到这里,后面大家就可以自己试着去做流水灯了。
[TPYBoard-Micropython教程之1] 运行第一个脚本——点亮LED的更多相关文章
- [TPYBoard - Micropython之会python就能做硬件 1] 运行第一个脚本——点亮LED
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 一.TPYBoard V102开发板 TPYBoard V102 ...
- STM32F407第一步之点亮LED
STM32F407第一步之点亮LED. 要点亮LED,首先了解一下F4的GPIO模块.首先看一下STM32F4数据手册,GPIO模块的内部结构图 看上去有点复杂,不要怕,慢慢理解就可以了.对外引脚那里 ...
- [Micropython] TPYBoard STM32F407开发板运行第一个脚本
从这篇教程开始将动手在TPYBoard STM32F407开发板上运行 Python 脚本,下面教大家拿到这个开发板后怎么用!(该款开发板某宝上有售) 1 连接开发板 通过 USB 线连接你的 PC ...
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的 学习在PC机系统中扩展简单I/O接口的方法. 进一步学习编制数据输出程序的设计方法. 学习蓝牙模块的接线方法及其工作原理. 学习L298N电机驱动板模块的接线方法. 学习蓝牙控制小车的工 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- Linux makefile教程之make运行八[转]
make 的运行 —————— 一 般来说,最简单的就是直接在命令行下输入make命令,make命令会找当前目录的makefile来执行,一切都是自动的.但也有时你也许只想让 make重编译某些文件, ...
随机推荐
- Total Highway Distance
Total Highway Distance 时间限制:10000ms 单点时限:1000ms 内存限制:256MB 描述 Little Hi and Little Ho are playing a ...
- MySql绿色版安装过程记录
作为程序猿,要多动手,周末趁着有空且笔记本刚刚装了系统,所以就配置了下绿色版的MySQL. 多动手,多动手,多动手. 多总结,多总结,多总结. 以下为正文: 一.下载MySQL绿色版: 1.这个地址: ...
- $(srctree) is not clean, please run 'make mrproper'
在使用make menuconfig重新配置后,再编译kernel时常会遇到这样的问题: Using /home/likewise-open/BJS/lisa.liu/code/sprdroid4.0 ...
- ComboBox值排序
ComboBox值排序先是想通过冒泡排序,但是冒泡排序是int类型,又打算通过下标,进行字符串排序,然后想到了一个简单的办法……先存入ArrayList排序Sort清空ComboBox再遍历存入 ...
- mongodb 分片群集(sharding cluster)
实际环境架构 分别在3台机器运行一个mongod实例(称为mongod shard11,mongod shard12,mongod shard13)组织replica set1,作为cluster的s ...
- Apache处理请求步骤及过程
Apache请求处理循环详解 : 1.Post-Read-Request阶段: 在正常请求处理流程中,这是模块可以插入钩子的第一个阶段.对于那些想很早进入处理请求的模块来说,这个阶段可以被利用. 2. ...
- PHP 实现冒泡法排序
<?php $nums = array(10,0,20,30,50,40,80); function stor($numbers){ $length = count($numbers); for ...
- 【bzoj1552】[Cerc2007]robotic sort
题目描述 输入 输入共两行,第一行为一个整数N,N表示物品的个数,1<=N<=100000.第二行为N个用空格隔开的正整数,表示N个物品最初排列的编号. 输出 输出共一行,N个用空格隔开的 ...
- DDR工作原理(转)
源:DDR工作原理 DDR SDRAM全称为Double Data Rate SDRAM,中文名为“双倍数据流SDRAM”.DDR SDRAM在原有的SDRAM的基础上改进而来.也正因为如此,DDR能 ...
- Android NDK开发及调用标准linux动态库.so文件
源:Android NDK开发及调用标准linux动态库.so文件 预备知识及环境搭建 1.NDK(native development Kit)原生开发工具包,用来快速开发C.C++动态库,并能自动 ...