点云网格化算法---MPA
MPA网格化算法思路
第一步:初始化一个种子三角面。(随机选点,基于该点进行临近搜索到第二点;在基于该线段中点临近搜索到第三点)
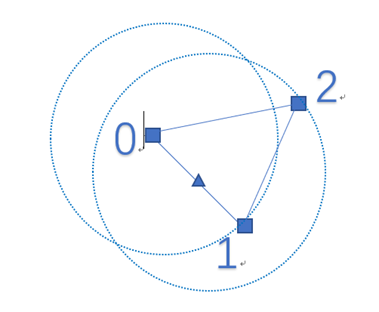
图1
第二步:在种子三角面的基础上,进行面片的扩充,利用边的中点进行临近搜索,碰到合适的点,就会跟这条边构成一个新的三角面,同时构造出两条新边。依次类推… 直到队列中不再有满足条件外边提供中点检索为止。
第三步:寻找新的种子三角面,进行第二步;直到再也无法找到合适的种子三角面,退出循环。
第四步:输出mesh,包含生成三角面,以及原始点云。
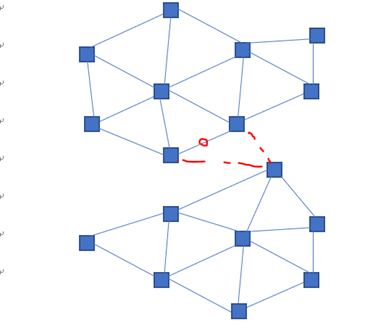
图2
主要算法实现:
for (size_t i = ; i < num; i+=)
{
if (point_vect[i].size()>)
{
continue;
} PointType searchPoint = cloud_ptr->points[i];
initializeTriangle(searchPoint); //第一步 初始化一个种子三角面 while (true)
{
if (edge_queue.empty())
{
//std::cout << "MPA::initializeTriangle() failed ..." << std::endl;
break;
} PCTTM_Edge search_edge = edge_queue.front();
bool bad_edge = false;
for (size_t i = ; i < point_vect[search_edge.p_index_first].size(); i++)
{
if (point_vect[search_edge.p_index_first][i].p_index == search_edge.p_index_end
&& point_vect[search_edge.p_index_first][i].ptp_relation == )
{
bad_edge = true;
}
}
if (bad_edge)
{
edge_queue.pop();
continue;
}
searchPointMPA(search_edge, ); //第二步 搜索点 扩展边
edge_queue.pop();
}
}
实现结果:
17万个点,构建了32.7万个面,目前用时26.774秒。

点云网格化算法---MPA的更多相关文章
- 3D点云配准算法简述
蝶恋花·槛菊愁烟兰泣露 槛菊愁烟兰泣露,罗幕轻寒,燕子双飞去. 明月不谙离恨苦,斜光到晓穿朱户. 昨夜西风凋碧树,独上高楼,望尽天涯路. 欲寄彩笺兼尺素.山长水阔知何处? --晏殊 导读: 3D点云 ...
- PCL点云库:ICP算法
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法.在VTK.PCL.MRPT.MeshLab等C++库或软件中都有实现,可以参见维基百科中的ICP Alg ...
- PCL—低层次视觉—点云分割(最小割算法)
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- PCL—点云分割(最小割算法) 低层次点云处理
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- 从零开始一起学习SLAM | 点云到网格的进化
点击公众号"计算机视觉life"关注,置顶星标更快接收消息! 本文编程练习框架及数据获取方法见文末获取方式 菜单栏点击"知识星球"查看「从零开始学习SLAM」一 ...
- 从零开始一起学习SLAM | 给点云加个滤网
对VSLAM和三维重建感兴趣的在计算机视觉life"公众号菜单栏回复"三维视觉"进交流群. 小白:师兄,上次你讲了点云拼接后,我回去费了不少时间研究,终于得到了和你给的参 ...
- 在hexo静态博客中利用d3-cloud来展现标签云
效果: http://lucyhao.com/tags/ hexo自带的tag cloud的标签展现不太美观,想能够展现出“云”效果的标签.在网上找到了d3-cloud这个项目,github地址:ht ...
- PCL—低层次视觉—点云分割(基于凹凸性)
1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割算法是实现复杂功能的基础.但是大家搞了几十年也还没搞定——不是我说的,是接下来要介绍的这篇论文说的.图像分割 ...
- PCL—低层次视觉—点云滤波(基于点云频率)
1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概念.但这个概念并未在文献中出现也未被使用,谨在本博文中滥用一下“高频”一词.点云表达的是三维空间中的一种信息 ...
随机推荐
- _proto_和prototype的区别
1. _proto_和prototype prototype属性是一个静态属性, _proto_属性是一个实例属性. prototype表示类的原型对象,_proto_表示原型对象中定义的内部属性[p ...
- vue - helloVue
开始学习vue了 1.数据绑定:{{data}} 2.el属性(挂载对象): el:标签任意(例如:#app,.app,app) 3.data:{} :存放数据. <!DOCTYPE html& ...
- 扇形导航 css3
本篇文章将通过对css3中的2d变化以及过渡进行分析设计 先放上最终效果图 功能实现:1.给扇形home元素设置点击事件并添加2d旋转 2.给导航栏设置2d旋转 并通过 ...
- nginx的rewrite
nginx服务的rewrite nginx后端服务的指令 1)upstream指令 :设置后端服务器组的主要指令 Upstream name {} 2)server指令:用于设定组内的服务器 3)Ip ...
- Big Data(七)MapReduce计算框架
二.计算向数据移动如何实现? Hadoop1.x(已经淘汰): hdfs暴露数据的位置 1)资源管理 2)任务调度 角色:JobTracker&TaskTracker JobTracker: ...
- JVM内存溢出处理方法
OOM(Out of Memory)异常常见有以下几个原因: 1)老年代内存不足:java.lang.OutOfMemoryError:Javaheapspace 2)永久代内存不足:java.lan ...
- Chrome,firefox解除阻止视频自动播放
Firefox 66 将阻止自动播放音频和视频 PingWest品玩2月5日报道,从发布适用于桌面的 Firefox 66 和 Firefox for Android 开始,Firefox 将默认阻止 ...
- 格兰杰因果 Granger causality
格兰杰因果关系(Granger causality )是基于预测的因果关系统计概念.根据格兰杰因果关系,如果信号X1“格兰杰Causes”(或“G-Causes”)信号X2,则X1的过去值应该包含有助 ...
- vue父组件调用子组件方法、父组件向子组件传值、子组件向父组件传值
一.父组件调用子组件方法 父组件代码 parent.vue <template> <div> <button @click="parentFun" ...
- LNMP 多版本PHP同时运行
首先需要装好两个版本以上的PHP(例如:php5.6和php7两个版本).这里假设你已安装完成.1.配置并启动php默认版本: (设置 nginx 的 vhost 域名配置文件监听端口就好) 1).打 ...