OpenCV畸变校正源代码分析
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包括普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法。
普通相机模型畸变校正函数针对OpenCV中的cv::initUndistortRectifyMap(),鱼眼相机模型畸变校正函数对应OpenCV中的cv::fisheye::initUndistortRectifyMap()。两种方法算出映射Mapx和Mapy后,统一用cv::Remap()函数进行插值得到校正后的图像。
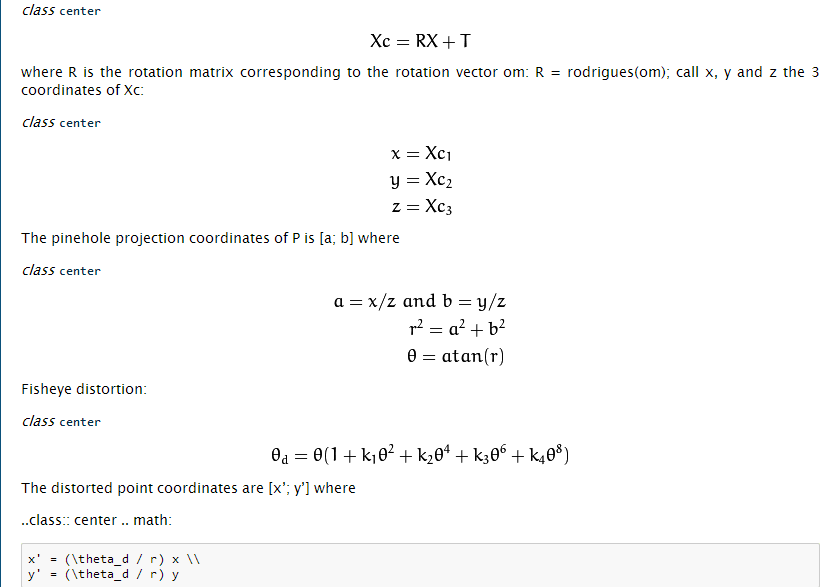
1. FishEye模型的畸变校正。
方便起见,直接贴出OpenCV源码,我在里面加了注释说明。建议参考OpenCV官方文档看畸变模型原理会更清楚:https://docs.opencv.org/3.0-beta/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#fisheye-initundistortrectifymap
简要流程就是:
1. 求内参矩阵的逆,由于摄像机坐标系的三维点到二维图像平面,需要乘以旋转矩阵R和内参矩阵K。那么反向投影回去则是二维图像坐标乘以 K*R的逆矩阵。
2. 将目标图像中的每一个像素点坐标(j,i),乘以1中求出的逆矩阵iR,转换到摄像机坐标系(_x,_y,_w),并归一化得到z=1平面下的三维坐标(x,y,1);
3.求出平面模型下像素点对应鱼眼半球模型下的极坐标(r, theta)。
4.利用鱼眼畸变模型求出拥有畸变时像素点对应的theta_d。
5.利用求出的theta_d值将三维坐标点重投影到二维图像平面得到(u,v),(u,v)即为目标图像对应的畸变图像中像素点坐标
6.使用cv::Remap()函数,根据mapx,mapy取出对应坐标位置的像素值赋值给目标图像,一般采用双线性插值法,得到畸变校正后的目标图像。
#include <opencv2\opencv.hpp> void cv::fisheye::initUndistortRectifyMap( InputArray K, InputArray D, InputArray R, InputArray P,
const cv::Size& size, int m1type, OutputArray map1, OutputArray map2 )
{
CV_Assert( m1type == CV_16SC2 || m1type == CV_32F || m1type <= );
map1.create( size, m1type <= ? CV_16SC2 : m1type );
map2.create( size, map1.type() == CV_16SC2 ? CV_16UC1 : CV_32F ); CV_Assert((K.depth() == CV_32F || K.depth() == CV_64F) && (D.depth() == CV_32F || D.depth() == CV_64F));
CV_Assert((P.empty() || P.depth() == CV_32F || P.depth() == CV_64F) && (R.empty() || R.depth() == CV_32F || R.depth() == CV_64F));
CV_Assert(K.size() == Size(, ) && (D.empty() || D.total() == ));
CV_Assert(R.empty() || R.size() == Size(, ) || R.total() * R.channels() == );
CV_Assert(P.empty() || P.size() == Size(, ) || P.size() == Size(, )); //从内参矩阵K中取出归一化焦距fx,fy; cx,cy
cv::Vec2d f, c;
if (K.depth() == CV_32F)
{
Matx33f camMat = K.getMat();
f = Vec2f(camMat(, ), camMat(, ));
c = Vec2f(camMat(, ), camMat(, ));
}
else
{
Matx33d camMat = K.getMat();
f = Vec2d(camMat(, ), camMat(, ));
c = Vec2d(camMat(, ), camMat(, ));
}
//从畸变系数矩阵D中取出畸变系数k1,k2,k3,k4
Vec4d k = Vec4d::all();
if (!D.empty())
k = D.depth() == CV_32F ? (Vec4d)*D.getMat().ptr<Vec4f>(): *D.getMat().ptr<Vec4d>(); //旋转矩阵RR转换数据类型为CV_64F,如果不需要旋转,则RR为单位阵
cv::Matx33d RR = cv::Matx33d::eye();
if (!R.empty() && R.total() * R.channels() == )
{
cv::Vec3d rvec;
R.getMat().convertTo(rvec, CV_64F);
RR = Affine3d(rvec).rotation();
}
else if (!R.empty() && R.size() == Size(, ))
R.getMat().convertTo(RR, CV_64F); //新的内参矩阵PP转换数据类型为CV_64F
cv::Matx33d PP = cv::Matx33d::eye();
if (!P.empty())
P.getMat().colRange(, ).convertTo(PP, CV_64F); //关键一步:新的内参矩阵*旋转矩阵,然后利用SVD分解求出逆矩阵iR,后面用到
cv::Matx33d iR = (PP * RR).inv(cv::DECOMP_SVD); //反向映射,遍历目标图像所有像素位置,找到畸变图像中对应位置坐标(u,v),并分别保存坐标(u,v)到mapx和mapy中
for( int i = ; i < size.height; ++i)
{
float* m1f = map1.getMat().ptr<float>(i);
float* m2f = map2.getMat().ptr<float>(i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f; //二维图像平面坐标系->摄像机坐标系
double _x = i*iR(, ) + iR(, ),
_y = i*iR(, ) + iR(, ),
_w = i*iR(, ) + iR(, ); for( int j = ; j < size.width; ++j)
{
//归一化摄像机坐标系,相当于假定在Z=1平面上
double x = _x/_w, y = _y/_w; //求鱼眼半球体截面半径r
double r = sqrt(x*x + y*y);
//求鱼眼半球面上一点与光心的连线和光轴的夹角Theta
double theta = atan(r);
//畸变模型求出theta_d,相当于有畸变的角度值
double theta2 = theta*theta, theta4 = theta2*theta2, theta6 = theta4*theta2, theta8 = theta4*theta4;
double theta_d = theta * ( + k[]*theta2 + k[]*theta4 + k[]*theta6 + k[]*theta8);
//利用有畸变的Theta值,将摄像机坐标系下的归一化三维坐标,重投影到二维图像平面,得到(j,i)对应畸变图像中的(u,v)
double scale = (r == ) ? 1.0 : theta_d / r;
double u = f[]*x*scale + c[];
double v = f[]*y*scale + c[]; //保存(u,v)坐标到mapx,mapy
if( m1type == CV_16SC2 )
{
int iu = cv::saturate_cast<int>(u*cv::INTER_TAB_SIZE);
int iv = cv::saturate_cast<int>(v*cv::INTER_TAB_SIZE);
m1[j*+] = (short)(iu >> cv::INTER_BITS);
m1[j*+] = (short)(iv >> cv::INTER_BITS);
m2[j] = (ushort)((iv & (cv::INTER_TAB_SIZE-))*cv::INTER_TAB_SIZE + (iu & (cv::INTER_TAB_SIZE-)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
} //这三条语句是上面 ”//二维图像平面坐标系->摄像机坐标系“的一部分,是矩阵iR的第一列,这样写能够简化计算
_x += iR(, );
_y += iR(, );
_w += iR(, );
}
}
}
2.普通相机模型的畸变校正
同样建议参考OpenCV官方文档阅读代码 https://docs.opencv.org/3.0-beta/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#。
主要流程和上面Fisheye模型差不多,只有第4部分的畸变模型不一样,普通相机的畸变模型如下:
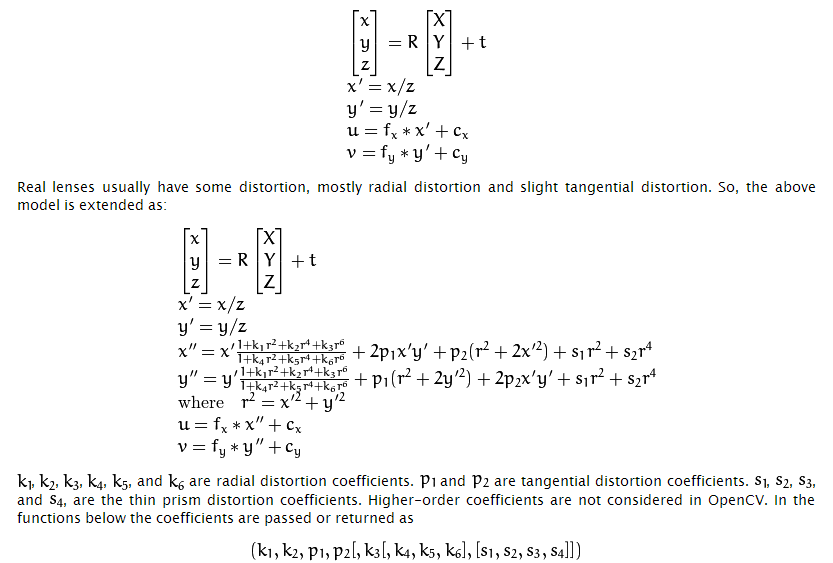
同样把源代码贴上,并加上注解:
#include <opencv2\opencv.hpp> void cv::initUndistortRectifyMap( InputArray _cameraMatrix, InputArray _distCoeffs,
InputArray _matR, InputArray _newCameraMatrix,
Size size, int m1type, OutputArray _map1, OutputArray _map2 )
{
Mat cameraMatrix = _cameraMatrix.getMat(), distCoeffs = _distCoeffs.getMat();
Mat matR = _matR.getMat(), newCameraMatrix = _newCameraMatrix.getMat(); if( m1type <= )
m1type = CV_16SC2;
CV_Assert( m1type == CV_16SC2 || m1type == CV_32FC1 || m1type == CV_32FC2 );
_map1.create( size, m1type );
Mat map1 = _map1.getMat(), map2;
if( m1type != CV_32FC2 )
{
_map2.create( size, m1type == CV_16SC2 ? CV_16UC1 : CV_32FC1 );
map2 = _map2.getMat();
}
else
_map2.release(); Mat_<double> R = Mat_<double>::eye(, );
Mat_<double> A = Mat_<double>(cameraMatrix), Ar; if( !newCameraMatrix.empty() )
Ar = Mat_<double>(newCameraMatrix);
else
Ar = getDefaultNewCameraMatrix( A, size, true ); if( !matR.empty() )
R = Mat_<double>(matR); if( !distCoeffs.empty() )
distCoeffs = Mat_<double>(distCoeffs);
else
{
distCoeffs.create(, , CV_64F);
distCoeffs = .;
} CV_Assert( A.size() == Size(,) && A.size() == R.size() );
CV_Assert( Ar.size() == Size(,) || Ar.size() == Size(, )); //LU分解求新的内参矩阵Ar与旋转矩阵R乘积的逆矩阵iR
Mat_<double> iR = (Ar.colRange(,)*R).inv(DECOMP_LU);
const double* ir = &iR(,); //从旧的内参矩阵中取出光心位置u0,v0,和归一化焦距fx,fy
double u0 = A(, ), v0 = A(, );
double fx = A(, ), fy = A(, ); //尼玛14个畸变系数,不过大多用到的只有(k1,k2,p1,p2),最多加一个k3,用不到的置为0
CV_Assert( distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, )); if( distCoeffs.rows != && !distCoeffs.isContinuous() )
distCoeffs = distCoeffs.t(); const double* const distPtr = distCoeffs.ptr<double>();
double k1 = distPtr[];
double k2 = distPtr[];
double p1 = distPtr[];
double p2 = distPtr[];
double k3 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double k4 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double k5 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double k6 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s1 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s2 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s3 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s4 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double tauX = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double tauY = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .; //tauX,tauY这个是什么梯形畸变,用不到的话matTilt为单位阵
// Matrix for trapezoidal distortion of tilted image sensor
cv::Matx33d matTilt = cv::Matx33d::eye();
cv::detail::computeTiltProjectionMatrix(tauX, tauY, &matTilt); for( int i = ; i < size.height; i++ )
{
float* m1f = map1.ptr<float>(i);
float* m2f = map2.empty() ? : map2.ptr<float>(i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f; //利用逆矩阵iR将二维图像坐标(j,i)转换到摄像机坐标系(_x,_y,_w)
double _x = i*ir[] + ir[], _y = i*ir[] + ir[], _w = i*ir[] + ir[]; for( int j = ; j < size.width; j++, _x += ir[], _y += ir[], _w += ir[] )
{
//摄像机坐标系归一化,令Z=1平面
double w = ./_w, x = _x*w, y = _y*w;
//这一部分请看OpenCV官方文档,畸变模型部分
double x2 = x*x, y2 = y*y;
double r2 = x2 + y2, _2xy = *x*y;
double kr = ( + ((k3*r2 + k2)*r2 + k1)*r2)/( + ((k6*r2 + k5)*r2 + k4)*r2);
double xd = (x*kr + p1*_2xy + p2*(r2 + *x2) + s1*r2+s2*r2*r2);
double yd = (y*kr + p1*(r2 + *y2) + p2*_2xy + s3*r2+s4*r2*r2);
//根据求取的xd,yd将三维坐标重投影到二维畸变图像坐标(u,v)
cv::Vec3d vecTilt = matTilt*cv::Vec3d(xd, yd, );
double invProj = vecTilt() ? ./vecTilt() : ;
double u = fx*invProj*vecTilt() + u0;
double v = fy*invProj*vecTilt() + v0;
//保存u,v的值到Mapx,Mapy中
if( m1type == CV_16SC2 )
{
int iu = saturate_cast<int>(u*INTER_TAB_SIZE);
int iv = saturate_cast<int>(v*INTER_TAB_SIZE);
m1[j*] = (short)(iu >> INTER_BITS);
m1[j*+] = (short)(iv >> INTER_BITS);
m2[j] = (ushort)((iv & (INTER_TAB_SIZE-))*INTER_TAB_SIZE + (iu & (INTER_TAB_SIZE-)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
}
else
{
m1f[j*] = (float)u;
m1f[j*+] = (float)v;
}
}
}
}
如有错误,望不吝赐教!
另附上CUDA实现两种畸变校正方法的代码,放在我的码云上:https://gitee.com/rxdj/camera-calibration.git。见cudaUndistort中的两个.cu文件
OpenCV畸变校正源代码分析的更多相关文章
- OpenCV畸变校正原理以及损失有效像素原理分析
上一篇博客简要介绍了一下常用的张正友标定法的流程,其中获取了摄像机的内参矩阵K,和畸变系数D. 1.在普通相机cv模型中,畸变系数主要有下面几个:(k1; k2; p1; p2[; k3[; k4; ...
- OpenCV两种畸变校正模型源代码分析以及CUDA实现
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包括普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法. 普通相机模型畸变校正函数针对OpenCV中的cv ...
- OpenCV亚像素角点cornerSubPixel()源代码分析
上一篇博客中讲到了goodFeatureToTrack()这个API函数能够获取图像中的强角点.但是获取的角点坐标是整数,但是通常情况下,角点的真实位置并不一定在整数像素位置,因此为了获取更为精确的角 ...
- 【OpenCV】摄像机标定+畸变校正
摄像机标定 本文目的在于记录如何使用MATLAB做摄像机标定,并通过OpenCV进行校正后的显示. 首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解: http://docs.open ...
- 车牌定位与畸变校正(python3.7,opencv4.0)
一.前言及思路简析 目前车牌识别系统在各小区门口随处可见,识别效果貌似都还可以.查阅资料后,发现整个过程又可以细化为车牌定位.畸变校正.车牌分割和内容识别四部分.本篇随笔主要介绍车牌定位及畸变校正两部 ...
- Matlab 摄像机标定+畸变校正
博客转载自:http://blog.csdn.net/Loser__Wang/article/details/51811347 本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行 ...
- cocos2d-x 源代码分析 总文件夹
这篇博客用来整理与cocos2d-x相关的工作,仅仅要有新的分析.扩展或者改动,都会更改此文章. 祝大家愉快~ 1.源代码分析 1.CCScrollView源代码分析 http://blog.csdn ...
- android-plugmgr源代码分析
android-plugmgr是一个Android插件加载框架,它最大的特点就是对插件不需要进行任何约束.关于这个类库的介绍见作者博客,市面上也有一些插件加载框架,但是感觉没有这个好.在这篇文章中,我 ...
- [翻译]利用顶点位移的VR畸变校正
文章英文原网址: http://www.gamasutra.com/blogs/BrianKehrer/20160125/264161/VR_Distortion_Correction_using_V ...
随机推荐
- 每周分享一 之 webSocket
一:什么是webSocket ? webSocket是HTML5出的新协议,WebSocket协议支持,在受控环境中运行不受信任代码的客户端与选择了该代码通信的远程主机之间进行双向通信. 简单翻译一下 ...
- Chinese Rings hdu 2842 矩阵快速幂
Chinese Rings Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Tot ...
- hdu3756三分基础题
Dome of Circus Time Limit: 10000/3000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others) ...
- (转)深度学习word2vec笔记之基础篇
深度学习word2vec笔记之基础篇 声明: 1)该博文是多位博主以及多位文档资料的主人所无私奉献的论文资料整理的.具体引用的资料请看参考文献.具体的版本声明也参考原文献 2)本文仅供学术交流,非商用 ...
- Python自学笔记-面向对象编程(Mr seven)
类的成员可以分为三大类:字段.方法和属性. 一.字段 字段包括:普通字段和静态字段,他们在定义和使用中有所区别,而最本质的区别是内存中保存的位置不同, 普通字段属于对象 静态字段属于类 二.方法 方法 ...
- cmd启动,重启,停止IIS命令
直接使用CMD我们可以操作很多事情,比如启动IIS,重启IIS,停止IIS 重启IIS服务器,开始->运行->cmd (以下列出相关操作命令): iisreset /RESTART 停止后 ...
- java 线程(1)
Java线程:概念与原理 一.操作系统中线程和进程的概念 现在的操作系统是多任务操作系统.多线程是实现多任务的一种方式. 进程是指一个内存中运行的应用程序,每个进程都有自己独立的一块内存空间,一个进程 ...
- win10 uwp 列表模板选择器
本文主要讲ListView等列表可以根据内容不同,使用不同模板的列表模板选择器,DataTemplateSelector. 如果在 UWP 需要定义某些列的显示和其他列不同,或者某些行的显示和其他行不 ...
- 不使用数据结构反转栈 递归 CVTE实习 CVTE是一家什么公司
本文因为垃圾csdn标题字限制,标题写不好.本文想说一个算法,和我在CVTE的实习,我看到CVTE是一家什么公司.如果想要喷我的,可以留言,我不会理.如果想喷公司,可以在博客评论或发到我邮件linde ...
- nodejs项目管理之supervisor||pm2||forever
supervisor 是开发环境用. forever 管理多个站点,每个站访问量不大,不需要监控. pm2 网站访问量比较大,需要完整的监控界面. supervisor 特点: 代码修改,实时重启 安 ...