LK光流算法公式详解
由于工程需要用到 Lucas-Kanade 光流,在此进行一下简单整理(后续还会陆续整理关于KCF,PCA,SVM,最小二乘、岭回归、核函数、dpm等等):
光流,简单说也就是画面移动过程中,图像上每个像素的x,y位移量,比如第t帧的时候A点的位置是(x1, y1),那么我们在第t+1帧的时候再找到A点,假如它的位置是(x2,y2),那么我们就可以确定A点的运动了:(u, v) = (x2, y2) - (x1,y1)
1、假设原图是I(x,y,z) (这里是扩展到三维空间的,所以还有个z值),移动后的图像是I(x+δx,y+δy,z+δz,t+δt),两者满足:

2、其中图像移动可以认为I (x ,y ,z ,t ) = I (x + δx ,y + δy ,z + δz ,t + δt )
也就是说: ( H.O.T. 指更高阶,在移动足够小的情况下可以忽略)
( H.O.T. 指更高阶,在移动足够小的情况下可以忽略)
3、从这个方程中我们可以得到:

其中Vx = u, Vy=v,也就是光流的值(二维图像没有z),

 则是图像在(x ,y,z ,t )这一点的梯度 (
则是图像在(x ,y,z ,t )这一点的梯度 ( 就是两帧图像块之间差值) 。
就是两帧图像块之间差值) 。
4、假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素1...n , n = m*m*m 中可以得到下列一组方程:




三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
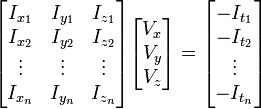
也就是:
采用最小二乘法:

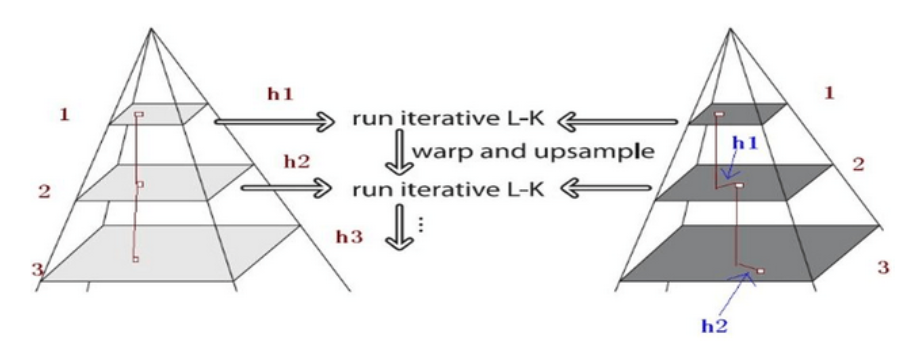
5、另外,由于LK算法假设是小位移,为了解决大位移问题,需要在多层图像缩放金字塔上求解,每一层的求解结果乘以2后加到下一层:
6、具体就见matlab代码:
其中求解最小二乘的行列式求解只有2维所以计算量尚可容忍
%Data acquisition
im1= ((imread('1.png')));
im2= ((imread('2.png')));
im1=single(im1);
im2=single(im2);
[result,corner_count,ptx,pty] = harris(im1); //harris角点是求光流的关键点
imagesc(result);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%parameters : levels number, window size, iterations number, regularization
numLevels= 4;
window= 10;
iterations=3;
alpha = 0.001;
hw = floor(window/2);
t0 = clock;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%pyramids creation
pyramid1 = im1;
pyramid2 = im2;
%init
for i=2:numLevels
im1 = impyramid(im1, 'reduce');
im2 = impyramid(im2, 'reduce');
pyramid1(1:size(im1,1), 1:size(im1,2), i) = im1;
pyramid2(1:size(im2,1), 1:size(im2,2), i) = im2;
end;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Processing all levels
for p = 1:numLevels
%current pyramid
im1 = pyramid1(1:(size(pyramid1,1)/(2^(numLevels - p))), 1:(size(pyramid1,2)/(2^(numLevels - p))), (numLevels - p)+1);
im2 = pyramid2(1:(size(pyramid2,1)/(2^(numLevels - p))), 1:(size(pyramid2,2)/(2^(numLevels - p))), (numLevels - p)+1);
%init
if p==1
u = zeros(size(im1));
v = zeros(size(im1));
else
%resizing
u = 2 * imresize(u,size(u)*2,'bilinear');
v = 2 * imresize(v,size(v)*2,'bilinear');
end
%refinment loop
for r = 1:iterations
u=round(u);
v=round(v);
%every pixel loop
for i = 1+hw:size(im1,1)-hw
for j = 1+hw:size(im2,2)-hw
patch1 = im1(i-hw:i+hw, j-hw:j+hw);
%moved patch
lr = i-hw+v(i,j);
hr = i+hw+v(i,j);
lc = j-hw+u(i,j);
hc = j+hw+u(i,j);
if (lr < 1)||(hr > size(im1,1))||(lc < 1)||(hc > size(im1,2))
%Regularized least square processing
else
patch2 = im2(lr:hr, lc:hc);
fx = conv2(patch1, 0.25* [-1 1; -1 1]) + conv2(patch2, 0.25*[-1 1; -1 1]);
fy = conv2(patch1, 0.25* [-1 -1; 1 1]) + conv2(patch2, 0.25*[-1 -1; 1 1]);
ft = conv2(patch1, 0.25*ones(2)) + conv2(patch2, -0.25*ones(2));
Fx = fx(2:window-1,2:window-1)';
Fy = fy(2:window-1,2:window-1)';
Ft = ft(2:window-1,2:window-1)';
A = [Fx(:) Fy(:)];
G=A'*A;
G(1,1)=G(1,1)+alpha; G(2,2)=G(2,2)+alpha;
U=1/(G(1,1)*G(2,2)-G(1,2)*G(2,1))*[G(2,2) -G(1,2);-G(2,1) G(1,1)]*A'*-Ft(:);
u(i,j)=u(i,j)+U(1); v(i,j)=v(i,j)+U(2);
end
end
end
end
etime(clock,t0)
end
LK光流算法公式详解的更多相关文章
- HS光流算法详解<转载>
HS 光流法详解 前言 本文较为详细地介绍了一种经典的光流法 - HS 光流法. 光流法简介 当人的眼睛与被观察物体发生相对运动时,物体的影像在视网膜平面上形成一系列连续变化的图像,这一系列变化的图像 ...
- 光流法详解之一(LK光流)
Lucas–Kanade光流算法是一种两帧差分的光流估计算法.它由Bruce D. Lucas 和 Takeo Kanade提出 [1]. LK光流法有三个假设条件: 1. 亮度恒定:一个像素点随着时 ...
- 光流法详解之二(HS光流)
Horn–Schunck光流算法[1]是一种全局方法估算光流场. 参考博文:https://blog.csdn.net/hhyh612/article/details/79216021 假设条件: H ...
- HS 光流法详解
前言 本文较为详细地介绍了一种经典的光流法 - HS 光流法. 光流法简介 当人的眼睛与被观察物体发生相对运动时,物体的影像在视网膜平面上形成一系列连续变化的图像,这一系列变化的图像信息不断 &quo ...
- AVL树详解
AVL树 参考了:http://www.cppblog.com/cxiaojia/archive/2012/08/20/187776.html 修改了其中的错误,代码实现并亲自验证过. 平衡二叉树(B ...
- C++构造函数详解及显式调用构造函数
来源:http://www.cnblogs.com/xkfz007/archive/2012/05/11/2496447.html c++类的构造函数详解 ...
- C++中构造函数详解及显式调用构造函数
C++构造函数详解及显式调用构造函数 c++类的构造函数详解 一. 构造函 ...
- LK 光流法简介
前言 若假定一个局部区域的像素运动是一致的,则可以用这个新的约束条件替代前文中提到的全局速度平滑约束条件.这种光流算法就叫做 LK 光流法. LK 光流法的推导 首先,需要推导出光流约束方程. 这一步 ...
- C++11 并发指南------std::thread 详解
参考: https://github.com/forhappy/Cplusplus-Concurrency-In-Practice/blob/master/zh/chapter3-Thread/Int ...
随机推荐
- SimpleDateFormat线程安全问题
今天线上出现了问题,从第三方获取的日期为 2019-12-12 11:11:11,通过SimpleDateFormat转换格式后,竟然出现完全不正常的日期数据,经百度,得知SimpleDateForm ...
- Java组合模式(思维导图)
图1 组合模式[点击查看图片] 1,以公司职员为例的结构 package com.cnblogs.mufasa.demo3; import java.util.ArrayList; import ja ...
- IOC之MEF学习
MEF原理上很简单,找出有共同接口的导入.导出.然后找到把导出的实例化,赋给导入.说到底MEF就是找到合适的类实例化,把它交给导入.Export 特性可修饰类.字段.属性或方法,而 Import 特性 ...
- DSN 建立达梦7(DM)连接
(DSN)Data Source Name 数据源名称 “ODBC数据源管理器”提供了三种DSN,分别为用户DSN.系统DSN和文件DSN.其中: 用户DSN会把相应的配置信息保存在Wind ...
- SpringBoot的数据访问
一.JDBC方式 引入starter. <dependency> <groupId>org.springframework.boot</groupId> <a ...
- C# 关键字 virtual、override和new的用法
代码如下: class A { public void foo() { Console.WriteLine("A::foo()"); } public virtual void b ...
- 基于Hadoop生态SparkStreaming的大数据实时流处理平台的搭建
随着公司业务发展,对大数据的获取和实时处理的要求就会越来越高,日志处理.用户行为分析.场景业务分析等等,传统的写日志方式根本满足不了业务的实时处理需求,所以本人准备开始着手改造原系统中的数据处理方式, ...
- 解决设置了display:none的元素,会先展示再隐藏
问题:元素明明设置了display:none,但是在刷新页面的时候却会先显示了出来,然后才会隐藏,实现display:none 原因:由于元素渲染的时候,样式还没有应用上去,导致的 解决办法:使用内联 ...
- sql 存储过程笔记3
16:22 2014/1/26一.定义变量--简单赋值declare @a int set @a = 5 print @a --使用select语句赋值declare @user1 nvarchar( ...
- Flutter——ListView组件(平铺列表组件)
ListView的常见参数: 名称 类型 说明 scrollDirection Axis Axis.horizontal 水平列表 Axis.vertical 垂直列表 padding EdgeIns ...