有容云-【原理】Docker存储驱动之AUFS
编者按:今天聊一聊Docker的Image(镜像)与Container(容器)的存储以及存储驱动之AUFS。
Docker存储驱动简介
Docker内置多种存储驱动,每种存储驱动都是基于Linux文件系统(Linux FS)或者卷管理(Volume Manager)技术。一般来说,Docker存储驱动的名称与文件系统(存储技术)同名,见下表对应关系:

AUFS简介
AUFS,起初名为AnotherUnionFileSystem,是一种UnionFS,V2版本后更名为 advanced multi‐layered unification fileystem,即高级多层统一文件系统。
AUFS是一位名为岡岛纯二郎的日本人于2006年基于UnionFS开发的,目的也是为了提高其可靠性和性能,也在AUFS上实现了一些新的概念比如写分支平衡等(writeable branchbalancing)。
纯二郎先生曾多次提交aufs到linux主干,但一直被拒绝,可纯二郎依旧日以继夜的修改代码,并不断提交,可一直没有被merge,而纯二郎最终也放弃提交代码到linux主干,从而aufs也一直没有进入linux内核。关于为何linux不要aufs,主要是aufs代码太糟糕,“dense,unreadable,and uncommented”,乱,可读性差,没注释...。
Tips:虽然AUFS没有进入Liunx内核,但是Ubuntu系统使用AUFS作为默认的存储驱动,Docker早期仅支持Ubuntu便是这个原因。
AUFS核心概念
将多个目录合并成一个虚拟文件系统,成员目录称为虚拟文件系统的一个分支(branch)。
例如,把 /tmp, /var, /opt三个目录联合挂着到 /aufs目录下,则 /aufs目录可见 /tmp, /var, /opt目录下的所有文件。而每个成员目录,则称为虚拟文件系统的一个branch。

每个branch可以指定 readwrite/whiteout‐able/readonly权限,只读(ro),读写(rw),写隐藏(wo)。一般情况下,aufs只有最上层的branch具有读写权限,其余branch均为只读权限。只读branch只能逻辑上修改。
例如,把/tmp目录和 /var目录联合挂载到 /aufs目录下, /var目录挂载为顶层branch具有rw权限,而 /tmp目录挂载为下层branch,具有ro权限。如果把 /tmp目录 /var目录 /opt目录联合挂载到 /aufs目录下,只有最顶层 /optbranch具有rw权限,下层branch均为ro权限。

Tips:mount t aufs obr=/tmp:/var:/opt none /aufs
该指令联合挂载 /tmp, /var, /opt至挂载点 /aufs,按照从左到右的顺序 /tmp位于顶层branch,而 /opt位于最底层branch,所有的branch按照顺序共同构成 /aufs栈。
AUFS每层branch可以动态的增加删除,每增加一层,下层默认置为ro,最上一层为rw。删除branch是在aufs挂载点移除,并未删除挂载目录。
Docker中的AUFS
AUFS是Docker使用的第一个存储驱动,长时间以来,一直很稳定。虽然目前Docker支持多种存储驱动,而在Ubuntu中默认使用aufs存储驱动,可以使用Docker info指令进行查看。对于Docker而言,AUFS有很多优秀的特点,比如快速启动容器,高效存储利用率,高效内存利用率等。
Docker镜像和AUFS branch对应关系
Docker镜像(Image)是由一个或多个AUFS branch组成,并且所有的branch均为只读权限。简单来说,AUFS所有robranch按照一定顺序堆积构成Docker Image镜像。
在运行容器的时候,创建一个AUFS branch位于image层之上,具有rw权限,并把这些branch联合挂载到一个挂载点下。这就是Docker能够一个镜像运行多个容器的原理所在。
例如,Image有3个目录位于 /var/lib/docker/aufs/diff/文件夹内,当基于该Image创建容器时,创建一个容器运行目录,同样位于/var/lib/docker/aufs/diff/目录下,并使用aufs联合挂载Image目录和Container目录到 /var/lib/docker/aufs/mnt/目录下。
每一个目录在aufs内都是一层branch,只有顶层容器branch可读写,下层Image branch均只读。创建多个容器时,只需创建多个容器运行目录,使用aufs把容器运行目录挂载在Image目录之上,即实现一个Image运行多个Container。

如上图中基于同一个Image运行两个容器,低层Image一致,每启动一个新容器,便会新建一个目录作为aufs branch并与Image branch进行联合挂载。
容器文件读写与删除
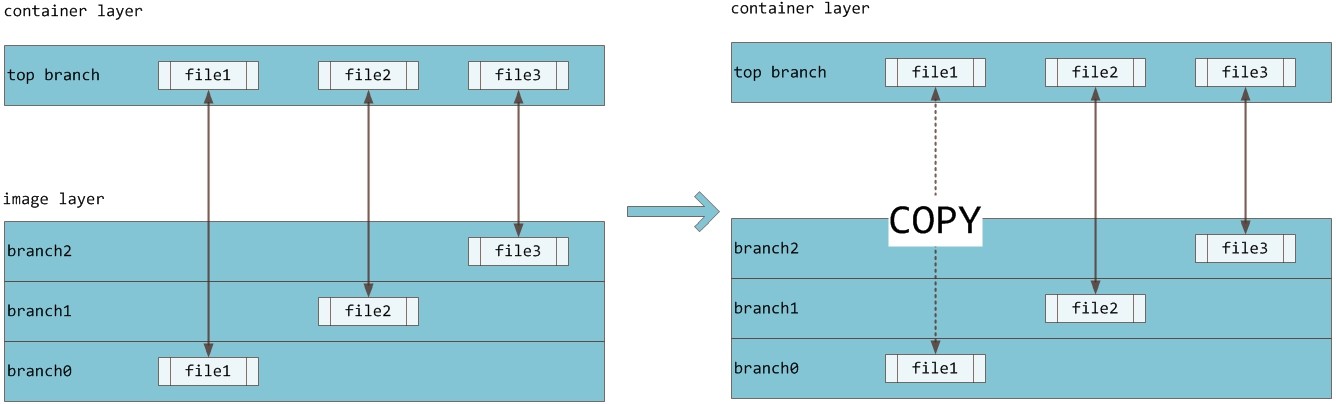
当容器需要修改一个文件,而该文件位于低层branch时,顶层branch会直接复制低层branch的文件至顶层再进行修改,而低层的文件不变,这种方式即是CoW技术(写复制),AUFS默认支持Cow技术。
当容器删除一个低层branch文件时,只是在顶层branch对该文件进行重命名并隐藏,实际并未删除文件,只是不可见,这种方式即AUFS的whiteout(写隐藏)。
下图所示,容器层所见file1文件为镜像层文件,当需要修改file1时,会从镜像层把文件复制到容器层,然后进行修改,从而保证镜像层数据的完整性和复用性。
下图所示,当需要删除file1时,由于file1是镜像层文件,容器层会创建一个 .wh前置的隐藏文件,从而实现对file1的隐藏,实际并未删除file1,从而保证镜像层数据的完整性和复用性。

Docker本地存储目录
Docker镜像存在在/var/lib/docker/aufs/diff/目录下。/var/lib/docker/aufs/layers/目录存储image的元信息,主要是image的每一层layer组织顺序(AUFS branch堆积顺序)。
Docker容器挂载点位于/var/lib/docker/aufs/mnt/目录下,该目录即为AUFS联合挂载点。
Tips:早期镜像的每一层数据存储在/var/lib/docker/aufs/diff/目录下,镜像ID与目录名同名,从docker v1.10 版本之后镜像ID不再与 /var/lib/docker/aufs/diff/目录下的目录同名,而是采用一个安全的hash值作为镜像存储文件夹名称。
总结
采用AUFS作为 Docker的容器存储驱动,使用AUFS技术,能够提供如下好处:
节省存储空间:多个容器可以共享基础镜像(Base Image)存储;
快速部署:如果要部署多个容器,基础镜像(Base Image)可以避免多次拷贝;
内存更省:因为多个容器共享Base Image,以及OS的Disk缓存机制,多个容器中的进程命中缓存内容的几率大大增加;
允许在不更改基础镜像的同时修改其目录中的文件:所有写操作都发生在最上层的writeable层中,这样可以大大增加Base Image能共享的文件内容。
【容器系列】补脑专用,容器生态圈脑图大放送
有容云-【原理】Docker存储驱动之AUFS的更多相关文章
- Docker存储驱动之AUFS简介
简介 AUFS是曾是Docker默认的首选存储驱动.它非常稳定.有很多真实场景的部署.很强的社区支持.它有以下主要优点: 极短的容器启动时间. 有效的存储利用率. 有效的内存利用率. 虽然如此,但由于 ...
- 聊一聊docker存储驱动
目录 镜像的分层特性 容器读写层的工作原理 写时复制 用时配置 Docker存储驱动 AUFS OverlayFS Devicemapper 常用存储驱动对比 AUFS VS OverlayFS Ov ...
- DOCKER学习_006:Docker存储驱动
一 镜像的分层特性 在说docker的文件系统之前,我们需要先想清楚一个问题.我们知道docker的启动是依赖于image,docker在启动之前,需要先拉取image,然后启动.多个容器可以使用同一 ...
- Docker存储驱动之OverlayFS简介
简介 OverlayFS是一种和AUFS很类似的文件系统,与AUFS相比,OverlayFS有以下特性: 1) 更简单地设计: 2) 从3.18开始,就进入了Linux内核主线: 3) 可能更快一些. ...
- Docker存储驱动之Device Mapper简介
Device Mapper是一个基于kernel的框架,它增强了很多Linux上的高级卷管理技术.Docker的devicemapper驱动在镜像和容器管理上,利用了该框架的超配和快照功能.为了区别, ...
- Docker存储驱动之总览
简介 本文会介绍Docker存储驱动的特性,别列出现在已经支持的存储驱动,最后,会介绍如果选型适合你的存储驱动. 可插拔的存储驱动架构 Docker的存储驱动架构是可插拔的,可以让你很方便的将适合你环 ...
- Docker存储驱动Device Mapper,Overlay,AUFS
Docker存储驱动之Device Mapper简介 - BookShu - 博客园https://www.cnblogs.com/styshoo/p/6528762.html Docker存储驱动之 ...
- docker 存储驱动(storage driver)知识总结
http://www.sohu.com/a/101016494_116235 一,先看docker镜像是如何构建和存储. 下面是ubuntu:15.04的镜像分层.一共是4层,每一层都由一些只读并且描 ...
- Docker存储驱动之Btrfs简介
简介 Btrfs是下一代的copy-on-write文件系统,它支持很多高级特性,使其更加适合Docker.Btrfs合并在内核主线中,并且它的on-disk-format也逐渐稳定了.不过,它的很多 ...
随机推荐
- HTTP协议之应用
通过对http协议的理解.我们可以根据这些特性来进行一些应用. 1.我们可以根据http请求的头信息refer信息,我们可以来做网站的防盗链.refer记录访问到目标网站的上次访问路径.这样我们可以来 ...
- Mysql事务隔离级别和锁机制
一.Spring支持四种事务隔离级别: 1.ISOLATION_READ_UNCOMMITTED(读未提交):这是事务最低的隔离级别,它充许令外一个事务可以看到这个事务未提交的数据. 2.ISOLAT ...
- Rxjs中Notification 介绍
timer(0, 1000) // 计时器,每1000ms发射一个值,初始发射值延迟时间为0s: .pipe( take(5), // 取前5个值 takeWhile(value => valu ...
- web交互方式---ajax
知识不怕旧,关键在于在旧知识的基础上不断创新与提高! 引入一个问题:打开一个浏览器,在地址栏输入一个网址,按下 enter 键到看到整个页面,中间都经历了哪些事情? 这是一个前端的面试题,相信很多朋友 ...
- CentOS 6.x 安装 JDK1.8
安装方式:rpm(此方式不需要手动配置环境变量) 1. 查看系统是否自带了jdk 查看centos是否自带了openjdk,如果有则卸载掉(当然也可以不卸载,但要注意冲突及版本的使用) # 查看 rp ...
- C++ 洛谷 2014 选课 from_树形DP
洛谷 2014 选课 没学树形DP的,看一下. 首先要学会多叉树转二叉树. 树有很多种,二叉树是一种人人喜欢的数据结构,简单而且规则.但一般来说,树形动规的题目很少出现二叉树,因此将多叉树转成二叉树就 ...
- 关于关闭WPS锁屏屏保及设置电脑自动关闭显示屏及休眠的分享
最近公司工作的电脑突然自动加上了屏保锁屏,百思不得其解什么时候设置的,谁给设置的,未经用户允许就擅自给用户设置了??? 金山WPS未经用户允许给用户设置了锁屏屏保,而且这个功能非常不好用,按键盘有时候 ...
- Oracle数据库----函数
--大小写控制函数--upperselect * from emp where job = upper('salesman'); --lowerselect * from emp where lowe ...
- 2018年东北地区赛S - Problem I. Spell Boost HDU - 6508
题目地址:https://vjudge.net/problem/HDU-6508 思路:给一些卡,分为四种卡.1.白卡(没效果)2.魔法,作用卡(会对作用卡的费用减少,也会被魔法卡作用)3.作用卡(会 ...
- JavaScript 之迭代方法
前言:关于 JS 中为数组定义的迭代方法,我最开始是在<JavaScript高级程序设计>中学习的,然后...我并没有看懂,后来翻阅各个大佬的博客,稍微理解了那么一丢丢.以下就是我的一点见 ...