PHY状态机分析
PHY的12种状态
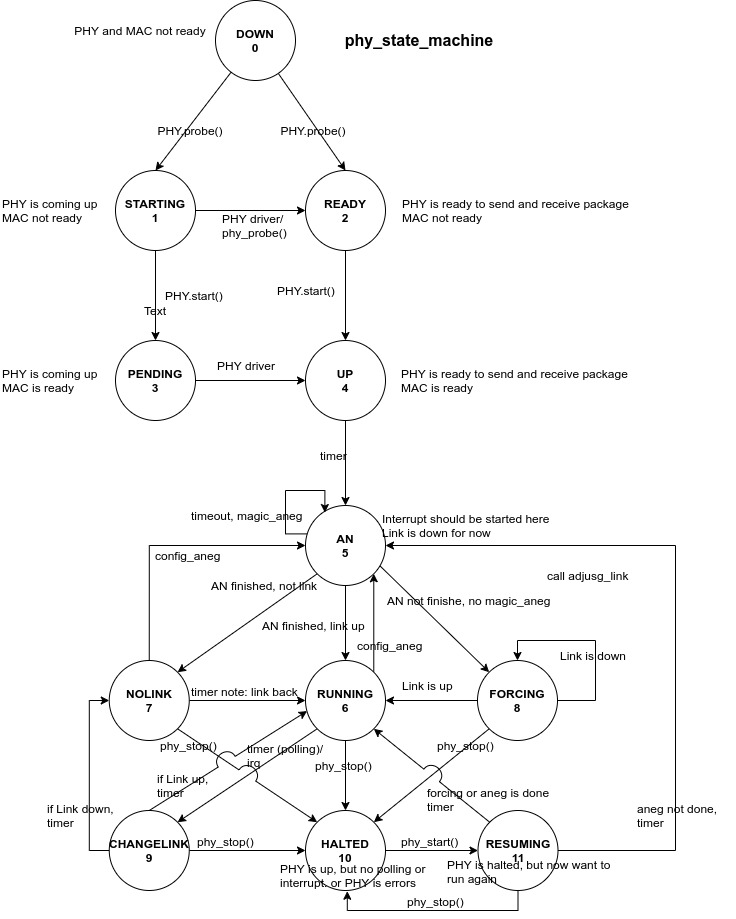
enum phy_state {
PHY_DOWN = 0, //关闭网卡
PHY_STARTING, //PHY设备准备好了,PHY driver尚为准备好
PHY_READY, //PHY设备注册成功
PHY_PENDING, //PHY芯片挂起
PHY_UP, //开启网卡
PHY_AN, //网卡自协商
PHY_RUNNING, //网卡已经插入网线并建立物理连接,该状态可切换到PHY_CHANGELINK
PHY_NOLINK, //断网,拔掉网线
PHY_FORCING,//自动协商失败,强制处理(读phy状态寄存器,设置速率,设置工作模式)
PHY_CHANGELINK, //LINK检查,当物理连接存在时切换到PHY_RUNING,物理连接不存在时切换到PHY_NOLINK
PHY_HALTED, //网卡关闭时,PHY挂起
PHY_RESUMING //网卡开启时,PHY恢复
};
PHY状态机
PHY指PHY芯片,负责数据传送与接收所需要的电与光信号、线路状态、时钟基准、数据编码和电路等,并向数据链路层设备提供标准接口。
MAC指MAC芯片,属于数据链路层,提供寻址机构、数据帧的构建、数据差错检查、传送控制、向网络层提供标准的数据接口等功能。
PHY_DOWN: phy、phy driver、mac都没准备好
- 如果phy driver被集成在内核中,PHY.probe后,phydev状态为PHY_READY。
- 如果phy driver被未集成在内核中,PHY.probe后,phydev状态为PHY_STARTING。
PHY_READY:phy、phy driver已经就绪,mac未准备好
当MAC层加载时,在PHY.start后,phydev状态切换为PHY_UP。
PHY_STARTING:phy准备就绪,phy driver、mac未准备好
- 当MAC加载时,PHY.start后,phydev状态为PHY_PENDING。
- 当phy driver加载时,phydev状态为PHY_READY。
PHY_PENDING:phy、mac准备就绪,phy driver未准备好
当phy dirver加载后,phdev状态为PHY_UP
上图中0-->1-->2-->4、0-->2-->4代表phy、phy dirver、mac顺序加载。
0-->1-->3-->4代表phy、mac、phy driver顺序加载。
PHY_UP:phy、phy driver、mac准备就绪
当前状态将启动自动协商,若启动成功则进入PHY_AN,若启动失败则进入PHY_FORCING。
PHY_AN:网卡自协商模式,检测自协商是否完成。
先判断物理链路的状态,如果未LINK则进入PHY_NOLINK,如果LINK则判断自协商是否完成,
自协商完成进入PHY_RUNNING,若自协商超时则重新开启自协商。
PHY_FORCING:强制协商
读link和自协商状态寄存器,如果状态正常则进入PHY_RUNNING模式。
PHY_NOLINK:物理链路未连接
判断物理链路状态,如果LINK,再判断是否支持自协商,若支持待自协商完成后进入PHY_RUNNING模式,
若不支持,直接进入PHY_RUNNING模式。若自协商处于挂起状态,则进入PHY_AN模式。
PHY_RUNNING:正常运行中
获取当前link状态,当link状态发生改变时,进入PHY_CHANGELINK模式。
PHY_CHANGELINK:检查物理链路
物理链路link时,切换到PHY_RUNNING,非LINK时切换到PHY_NOLINK。
PHY_HALTED:网卡关闭phy_stop
挂起phy
PHY_RESUMING: 网卡启用phy_start
恢复phy
phy_state_machine是PHY的状态机函数
/**
* phy_state_machine - Handle the state machine
* @work: work_struct that describes the work to be done
*/
void phy_state_machine(struct work_struct *work)
{
struct delayed_work *dwork = to_delayed_work(work);
struct phy_device *phydev =
container_of(dwork, struct phy_device, state_queue);
bool needs_aneg = false, do_suspend = false;
enum phy_state old_state;
int err = 0;
int old_link;
mutex_lock(&phydev->lock);
old_state = phydev->state;
if (phydev->drv->link_change_notify)
phydev->drv->link_change_notify(phydev);
switch (phydev->state) {
case PHY_DOWN:
case PHY_STARTING:
case PHY_READY:
case PHY_PENDING:
break;
case PHY_UP:
needs_aneg = true;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
case PHY_AN:
err = phy_read_status(phydev);
if (err < 0)
break;
/* If the link is down, give up on negotiation for now */
if (!phydev->link) {
phydev->state = PHY_NOLINK;
netif_carrier_off(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
break;
}
/* Check if negotiation is done. Break if there's an error */
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* If AN is done, we're running */
if (err > 0) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
} else if (0 == phydev->link_timeout--)
needs_aneg = true;
break;
case PHY_NOLINK:
if (phy_interrupt_is_valid(phydev))
break;
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
if (!err) {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
}
}
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
}
break;
case PHY_FORCING:
err = genphy_update_link(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
if (0 == phydev->link_timeout--)
needs_aneg = true;
}
phydev->adjust_link(phydev->attached_dev);
break;
case PHY_RUNNING:
/* Only register a CHANGE if we are polling or ignoring
* interrupts and link changed since latest checking.
*/
if (!phy_interrupt_is_valid(phydev)) {
old_link = phydev->link;
err = phy_read_status(phydev);
if (err)
break;
if (old_link != phydev->link)
phydev->state = PHY_CHANGELINK;
}
/*
* Failsafe: check that nobody set phydev->link=0 between two
* poll cycles, otherwise we won't leave RUNNING state as long
* as link remains down.
*/
if (!phydev->link && phydev->state == PHY_RUNNING) {
phydev->state = PHY_CHANGELINK;
dev_err(&phydev->dev, "no link in PHY_RUNNING\n");
}
break;
case PHY_CHANGELINK:
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
netif_carrier_off(phydev->attached_dev);
}
phydev->adjust_link(phydev->attached_dev);
if (phy_interrupt_is_valid(phydev))
err = phy_config_interrupt(phydev,
PHY_INTERRUPT_ENABLED);
break;
case PHY_HALTED:
if (phydev->link) {
phydev->link = 0;
netif_carrier_off(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
do_suspend = true;
}
break;
case PHY_RESUMING:
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* err > 0 if AN is done.
* Otherwise, it's 0, and we're still waiting for AN
*/
if (err > 0) {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
}
phydev->adjust_link(phydev->attached_dev);
} else {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
}
} else {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
}
phydev->adjust_link(phydev->attached_dev);
}
break;
}
mutex_unlock(&phydev->lock);
if (needs_aneg)
err = phy_start_aneg(phydev);
else if (do_suspend)
phy_suspend(phydev);
if (err < 0)
phy_error(phydev);
dev_dbg(&phydev->dev, "PHY state change %s -> %s\n",
phy_state_to_str(old_state), phy_state_to_str(phydev->state));
queue_delayed_work(system_power_efficient_wq, &phydev->state_queue,
PHY_STATE_TIME * HZ);
}
PHY状态机分析的更多相关文章
- 以太网PHY寄存器分析【转】
转自:https://blog.csdn.net/Firefly_cjd/article/details/79825869 以太网PHY寄存器分析 1 1.以太网PHY标准寄存器分析 2 ...
- openswan发送状态机分析
openswan发送状态机分析 1. 函数调用关系 2. 函数说明 如果按用户空间.内核空间划分的话,此部分代码更多是运行在内核空间的. 2.1 ipsec_tunnel_init_devices() ...
- osip状态机分析
转载于:http://blog.csdn.net/lbc2100/article/details/48342889 OSIP的核心是系统状态机,在不同情况下,系统处于不同的状态,在某一状态下当系统发生 ...
- Memcached 状态机分析
worker线程拿到了这个连接之后,就应该是分配给这个连接一个结构体,包括这个连接所有的状态,都写buf等,这个结构体就是conn,然后这个worker线程会在它自己的event_base加入对这个新 ...
- Thrift线程和状态机分析
目录 目录 1 1. 工作线程和IO线程 1 2. TNonblockingServer::TConnection::transition() 2 3. RPC函数被调用过程 3 4. 管道和任务队列 ...
- 基于335X的Linux网口驱动分析
基于335X的linux网口驱动分析 一. 系统构成 1. 硬件平台 AM335X 2. LINUX内核版本 4.4.12 二. 网口驱动构架(mdio部分) mdio网口驱动部分 使用 总线.设 ...
- capwap协议重点分析
一. CAPWAP概述 CAPWAP由两个部分组成:CAPWAP协议和无线BINDING协议. (1)CAPWAP协议是一个通用的隧道协议,完成AP发现AC等基本协议功能,和具体的无线接入技术 ...
- [RM 状态机详解4] RMNode状态机详解
摘要 RMNode状态机是ResourceManager的四个状态机(RMApp,RMAppAttempt,RMContainer,RMNode)中最简单的一个,状态机如图1所示.RMNode是Res ...
- [RM 状态机详解1] RMApp状态机详解
概述 Apache Hadoop 2.0在Hadoop 1.0基础上做了许多的重构工作,代码上的重构最大的变化在于引入状态机处理各个角色的状态与变迁,使用状态机是得代码结构更加清晰,方便异步处理各种操 ...
- linux网络设备—PHY
一.结构体 1.PHY设备 struct phy_device { struct phy_driver *drv; //PHY设备驱动 struct mii_bus *bus; //对应的MII总线 ...
随机推荐
- RabbitMq了解
RibbitMQ MQ优势 MQ的三大主要作用: 应用解耦.异步提速.流量削锋 应用解耦 系统的耦合性越高,容错性就越低,可维护性就越低: 解耦: 如果其中一个系统服务宕机,那么系统的其他服务将也无法 ...
- ElasticSearch7.6.1学习笔记-狂神
ElasticSearch:7.6.1 https://gitee.com/yujie.louis/elastic-search 笔记,代码,安装包等 什么是ElasticSearch? Elasti ...
- mongorestore target dump invalid CreateFile dump The system cannot find
问题 使用 mongorestore 指定 dump 文件夹,恢复数据报错. mongorestore target 'dump' invalid: CreateFile dump: The syst ...
- 关于虚拟机使用桥接网络访问不到物理机IP的问题解决
问题描述 物理机可以ping 到虚拟机IP,虚拟机 ping 不到物理机IP 解决方法 关闭物理机防火墙,重启虚拟机
- Asp.Net Core&Jaeger实现链路追踪
前言 随着应用愈发复杂,请求的链路也愈发复杂,微服务化下,更是使得不同的服务分布在不同的机器,地域,语言也不尽相同.因此需要借助工具帮助分析,跟踪,定位请求中出现的若干问题,以此来保障服务治理,链路追 ...
- day23 约束 & 锁 & 范式
考点: 乐观锁=>悲观锁=>锁 表与表的对应关系 一对一:学生与手机号,一个学生对一个手机号 一对多:班级与学生,一个班级对应多个学生 多对一: 多对多:学生与科目,一个学生对应多个科目, ...
- 【Java SE进阶】Day06 线程、同步
一.线程 1.多线程原理 流程图 内存图解说明 创建线程的方式 继承Thread类 实现 Runnable接口 2.继承Thead类 3.实现Runnable接口 实现接口,重写run方法 最终均需要 ...
- 【每日一题】【栈】2022年2月2日-NC40 两个链表生成相加链表
描述 假设链表中每一个节点的值都在 0 - 9 之间,那么链表整体就可以代表一个整数. 给定两个这种链表,请生成代表两个整数相加值的结果链表. 答案:栈 import java.util.*; /* ...
- 从稍微懂一点开始的C++学习之路1: 智能指针
从稍微懂一点开始的C++学习之路1 智能指针 因为之前一直是搞qt的,没有搞过纯c++,所以现在算得上是刚开始学纯C++.C++的大部分语法其实我都懂,主要的是一些规范,还有内存回收等一些细节地方纯C ...
- STM32点亮LED的代码
led.c #include "led.h" void LED_Config(void) { GPIO_InitTypeDef GPIO_InitStruct; RCC_APB2P ...