RDK X5首发上手体验!真的太帅啦!!!
RDK X5首发上手体验!真的太帅啦!!!
本Blog同步发表于:
- 地瓜机器人开发者论坛:
- CSDN:
一年多以前无意中了解到了RDK X3,之后我便迅速的被地平线机器人开发者论坛(现在改名为了地瓜机器人开发者论坛)优秀的生态所吸引,精美的官网界面,详实的开发资料,丰富的开发案例以及机器人开发交流群里超哥等人快速的技术支持让我迅速成为了RDK的忠实粉丝,RDK X3也陪我经历两次竞赛见证了我从小白到如今的蜕变,听闻要出X5的就非常激动想要早日拿到X5上手体验,终于也是在今天拿到了RDK X5!!!哈哈哈哈哈哈!
RDK X5的售价真的非常的美丽,首发这段时间还可以享受100的优惠减免,4GB的价格只要449,8GB也只要599,这个价格这个配置这个生态对比其他友商只能说Win~!
这里附上购买链接及地瓜机器人官网链接:

接着我们进入今天的评测正题!!!
拿到RDK X5我是真的惊叹与RDK的艺术设计,不管是X3还是X5,这个包装盒设计的真的很有艺术气息!很漂亮!夸夸艺术设计!

然后打开盒子拿出我们的X5,我只能说拿到手第一眼真的太帅了!!!中间的CPU采用了玻璃镜面设计,科技感一下就上来了,再加上X5板子的布局走线简直堪称一件精美的工艺品!(小声bb:都不敢拿手里了怕粘指纹在上面影响颜值...)

我们看一下X5的配置,相比于两年前的X3,RDK X5的CPU从4核A53升级为了8核A55,BPU的算力升级为了10TOPS同时还有了
32GFlops的GPU,最主要的是有了一个CAN口!!!
具体参数我整理了一下:
| CPU | 八核 CortesA55 |
|---|---|
| BPU | 10 TOPS |
| GPU | 32Gflops |
| 内存 | 4GB/8GB LPDDR4 |
| 储存 | NA, supports external Micro SD card Peripheral |
| Sensor | 2 x 4-lane MIPI CSI |
| USB Host | 4 x USB 3.0 Host interfaces(Type-A) |
| USB Device | 1 x USB 2.0 Device interface(Type-C) |
| Debug 串口 | 1 x Debug serial port(Micro USB) |
| 耳机 | 1 x 3.5mm headphone jack audio input/output |
| 无线网络 | Wi-Fi 6 & Bluetooth 5.4 |
| 有线网络 | 1 x Gigabit Ethernet RJ45 port with POE |
| CAN | 1x CAN FD |
| IO | 28 GPIOs (Reusable support 5 x UART, 8 x PWM, 3 x I2C, 2 x SPI, 1x I2S |
| 显示 | 1 x MIPI DSI 4 Lane,1 x HDMI Type-A port supporting up to 1080p60 |
| 系统支持 | Ubuntu22.04 |
我本来想用RDK X5最新支持的闪联技术的,但是不知道为什么我的电脑下载RDK Studio后会有报错然后又说找不到芯片烧录工具,不过也能理解闪连还是一个刚发布的工具,未来RDK Studio这一块地瓜的工作人员还有很大的优化空间,优化好了之后应该会是一个生产力极高的开发工具。

接着我们使用传统方法下载好镜像后用BalenaEtcher进行烧录制作TF卡,插上开机亮屏!!!


接下来我们先用键盘鼠标给X5连接一下网络,接着用MobaXterm来远程SSH连接我们的X5,连接上后之后用如下命令升级一下apt:
sudo apt update
sudo apt upgrade
X5的桌面版系统的使用体验比X3好了很多,CPU升级带来的变化是很明显的,以前用X3的时候用桌面版系统不超频的话老是卡卡的,远程连接X3也会时不时莫名其妙重启,但是现在X5能明显感觉速度非常流畅毕竟8核A55还是非常不错哒,但是真的习惯超频了所以还是顺手抄一下(doge),我们先照官方手册里频率管理一节的说法,使用如下命令对X5进行超频:
echo 1 >/sys/devices/system/cpu/cpufreq/boost
echo performance >/sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
超完频之后我们就来体验一下X5的10TOPS算力吧!由于我还没有配地瓜官方的工具链所以我们今天直接来体验一下地瓜官网NodeHub里面的例程叭,首先我们打开NodeHub官网:地瓜机器人-NodeHub,找到Yolov8目标检测一栏,按照官方超哥的介绍X5上的Yolov8能跑到惊人的220FPS!!!(在实验室呆了两年了,从没打过算力这么充足的仗wwwwww),我们按照里面的部署教程开始一步一步配置(小声bb:好多文字错误呀)

我们一步一步输入一下命令:
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 配置使用的摄像头类型(usb or mipi)
export CAM_TYPE=usb
# 启动launch文件
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/yolov2workconfig.json dnn_example_image_width:=480 dnn_example_image_height:=272
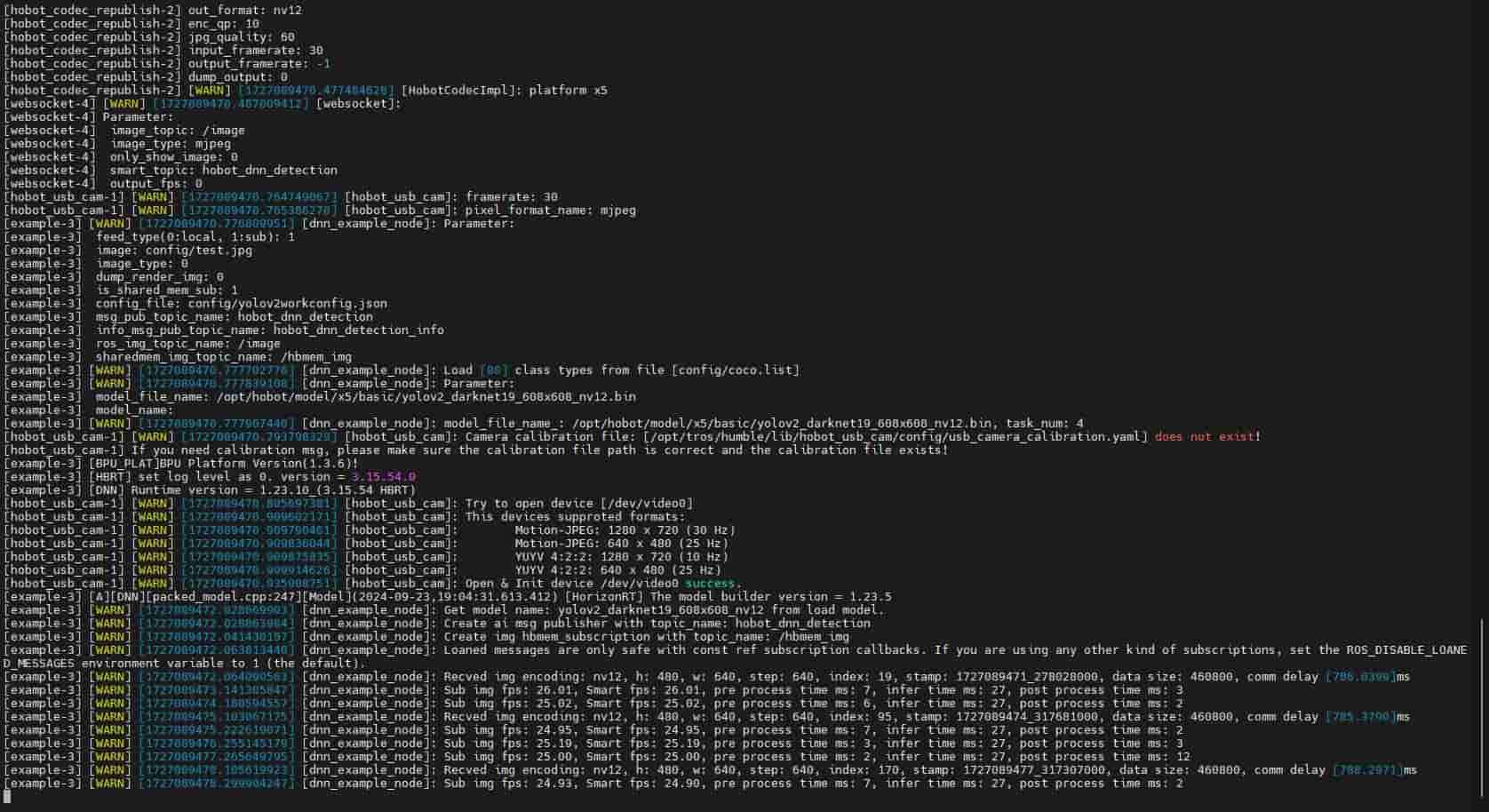
回车后运行打印出的结果如上,可以看到预处理部分花了7ms,推理部分使用了27ms,后处理花了3ms的样子,对比X3推理部分的时间真的快了不少,接着我们打开X5的网络界面查看实时推理的结果,我们在同一个网络环境下的任意设备打开浏览器,输入如下地址即可查看到X5的实时推理结果:
板子的IP:8000 #端口为8000
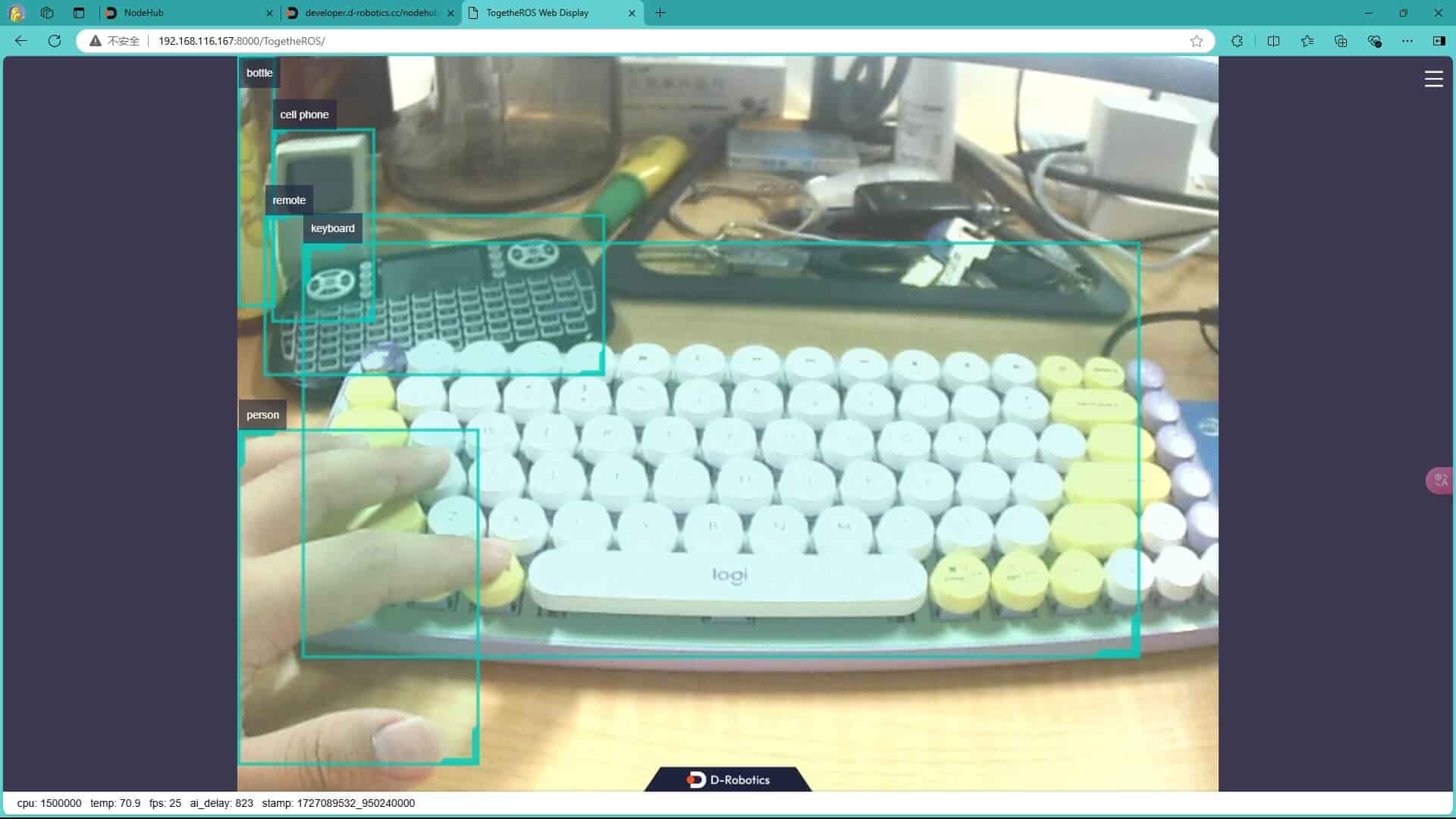
可以看到我们的推理结果还是非常准确的~
由于今天还需要上课,今天就只能先浅浅体验一下X5的Yolov8的表现了,接下来我还会发布更多的使用体验心得和发布一些项目,可以先关注我的博客,敬请期待啦!
RDK X5首发上手体验!真的太帅啦!!!的更多相关文章
- 小鸡G4工程款 上手体验
前言:之前只是抱着试一试的态度在小鸡活动贴下报名,说实话之前并没有抱希望能够没选中.所以非常感谢小鸡团队给我的这次机会.这应该是我第一次参与厂家的内测活动.希望能给小鸡团队,给广大玩家带来一片实用的上 ...
- 微信清理H5真的太早了?这会是应用号发布的前兆吗
三少爷的剑 2016-04-18 21:05 收藏35 评论7 两天之内,整个 H5 游戏创业陷入了两年狂热期以来最冷的冰点. 每一个正在忙于 H5 小游戏开发的开发者都在忙于砍掉游戏代码中有关 ...
- Python 多线程、进程、协程上手体验
浅谈 Python 多线程.进程.协程上手体验 前言:浅谈 Python 很多人都认为 Python 的多线程是垃圾(GIL 说这锅甩不掉啊~):本章节主要给你体验下 Python 的两个库 Thre ...
- Android 7.0真实上手体验
Android 7.0真实上手体验 Android 7.0的首个开发者预览版发布了,支持的设备只有Nexus6.Nexus 5X.Nexus 6P.Nexus 9.Nexus Player.Pixel ...
- 一分钟安装DolphinScheduler并上手体验
一分钟安装Apache DolphinScheduler并上手体验 1 一分钟安装DolphinScheduler并上手体验 本教程基于DolphinScheduler1.3.2 2 需要准备: 一台 ...
- Leap Motion 上手体验
很早之前就关注了Leap Motion这个颠覆性的体感操作设备,如今7月22日上市至今已经一个月左右,淘宝的价格也已经降到650元,虽说相对国外还是偏贵,但是已经忍不住尝尝鲜了. Leap Motio ...
- 华为ARM64服务器上手体验--不吹不黑,用实际应用来看看TaiShan鲲鹏的表现
背景 中美贸易冲突以来,相信最大的感受,并不是我对你加多少关税,而是我有,可我不卖给你."禁售"成了市场经济中最大的竞争力. 相信也是因为这个原因,华为"备胎转正&quo ...
- Android 5.0 Lollipop初上手体验
在等了好几天还没有等到OTA升级提示,前天笔者给Nexus4线刷入了官方提供的Lollipop的镜像,在试用了这两天之后,现在总结下自己感觉很惊艳的地方和一些地方的吐槽.(点击图片可以查看大图) 1. ...
- 用户测评 | EDAS Serverless 上手体验
背景 最初, 是因为对 Serverless 这一概念感兴趣, 所以开始试用阿里云函数计算,使用过程中感受到了函数计算快速.按需付费和弹性伸缩等方面的优势,随后我在天气预报.发送短信等场景下开始了更深 ...
- 这个Bug的排查之路,真的太有趣了。
这是why哥的第 92 篇原创文章 在<深入理解Java虚拟机>一书中有这样一段代码: public class VolatileTest { public static volat ...
随机推荐
- useHeadSafe:安全生成HTML头部元素
title: useHeadSafe:安全生成HTML头部元素 date: 2024/7/17 updated: 2024/7/17 author: cmdragon excerpt: 摘要:&quo ...
- 使用 useLazyAsyncData 提升数据加载体验
title: 使用 useLazyAsyncData 提升数据加载体验 date: 2024/7/19 updated: 2024/7/19 author: cmdragon excerpt: 摘要: ...
- .NET Core 3.x 基于AspectCore实现AOP,实现事务、缓存拦截器
最近想给我的框架加一种功能,就是比如给一个方法加一个事务的特性Attribute,那这个方法就会启用事务处理.给一个方法加一个缓存特性,那这个方法就会进行缓存.这个也是网上说的面向切面编程AOP. A ...
- 助动词&情态动词
助动词 (auxiliary verbs) 任何整句都分为主语和谓语,而谓语部分的核心是谓语动词, 但是谓语动词本身往往无法独立表达某些语法概念,需要其他词的辅助, 而这类来辅助构成谓语但自己本身不能 ...
- RHCA rh442 001 调优本质 调优方法 监控
调优是一种感知 调优按照成本和性能 一.架构及调优 二.代码及调优 三.配置类调优 从调优效果和成本成正比 设计电商,日访问百万级,未来可能千万级 数据库 系统 服务器多少台 缓存 appache,n ...
- 7、SpringMVC之RESTful概述
创建名为spring_mvc_rest的新module,过程参考5.2节和6.6节 7.1.简介 RESTful 也称为REST(英文:Representational State Transfer) ...
- TinyVue v3.17.0 正式发布,推出了一款基于 Quill 2.0 的富文本编辑器,功能强大、开箱即用!
你好,我是 Kagol. 我们非常高兴地宣布,2024年6月26日,TinyVue 发布了 v3.17.0 . TinyVue 每次大版本发布,都会给大家带来一些实用的新特性,上一个版本我们重构了 c ...
- 全网最适合入门的面向对象编程教程:31 Python的内置数据类型-对象Object和类型Type
全网最适合入门的面向对象编程教程:31 Python 的内置数据类型-对象 Object 和类型 Type 摘要: Python 中的对象和类型是一个非常重要的概念.在 Python 中,一切都是对象 ...
- 计算机类的短周期的SCI期刊
<Human-centric Computing and Information Sciences> 韩国人办的,Open Access,周期短,费用高,SCI二区,水毕业可用. 以下引自 ...
- 【转载】 解决运行docker命令要用sudo的问题
将当前登录的用户添加到docker组中,这样以后在访问docker时就不用在sudo了 1. 查看是否创建docker 组 cat /etc/group | grep docker 2.创建docke ...