CUDA C编程权威指南:2.2-给核函数计时
本文主要通过例子介绍了如何给核函数计时的思路和实现。实现例子代码参考文献[7],只需要把相应章节对应的CMakeLists.txt文件拷贝到CMake项目根目录下面即可运行。
1.用CPU计时器计时(sumArraysOnGPU-timer.cu)[7]
在主函数中用CPU计时器测试向量加法的核函数,如下所示:
#include <cuda_runtime.h> // 包含cuda运行时系统的头文件
#include <stdio.h> // 包含标准输入输出函数的头文件
#include <time.h> // 包含时间函数的头文件
#include <sys/timeb.h> // 包含时间函数的头文件
//#define CHECK(call) // 定义CHECK宏函数
void initialData(float *ip, int size)
{
// 为随机数生成不同的种子
time_t t; // time_t是一种时间类型
srand((unsigned int) time(&t)); // time()函数返回当前时间的秒数
for (int i = 0; i < size; i++) // 生成随机数
{
ip[i] = (float) (rand() & 0xFF) / 10.0f; // rand()函数用于生成随机数
}
}
void checkResult(float *hostRef, float *gpuRef, const int N) // 检查结果
{
double epsilon = 1.0E-8; // 定义误差范围
bool match = 1; // 定义匹配标志
for (int i = 0; i < N; i++) // 比较每个元素
{
if (abs(hostRef[i] - gpuRef[i]) > epsilon) // 如果误差超过范围
{
match = 0; // 匹配标志置0
printf("Arrays do not match!\n"); // 打印提示信息
printf("host %5.2f gpu %5.2f at current %d\n", hostRef[i], gpuRef[i], i); // 打印不匹配的元素
break;
}
}
if (match) printf("Arrays match.\n\n"); // 如果匹配,打印提示信息
}
void sumArraysOnHost(float *A, float *B, float *C, const int N) // 在主机上计算
{
for (int idx = 0; idx < N; idx++) // 计算每个元素
{
C[idx] = A[idx] + B[idx]; // 计算
}
}
__global__ void sumArraysOnGPU(float *A, float *B, float *C) // 在设备上计算
{
// int i = threadIdx.x; // 获取线程索引
int i = blockIdx.x * blockDim.x + threadIdx.x; // 获取线程索引
// printf("threadIdx.x: %d, blockIdx.x: %d, blockDim.x: %d\n", threadIdx.x, blockIdx.x, blockDim.x); // 打印线程索引
C[i] = A[i] + B[i]; // 计算
}
struct timeval { // 定义timeval结构体
long tv_sec; // 秒
long tv_usec; // 微秒
};
int gettimeofday(struct timeval *tp, void *tzp) { // 定义gettimeofday函数
struct _timeb timebuffer; // 定义_timeb结构体
_ftime(&timebuffer); // 获取当前时间
tp->tv_sec = static_cast<long>(timebuffer.time); // 转换为秒
tp->tv_usec = timebuffer.millitm * 1000; // 转换为微秒
return 0; // 返回0
}
double cpuSecond() { // 定义cpuSecond函数
struct timeval tp; // 定义timeval结构体
gettimeofday(&tp, NULL); // 获取当前时间
return ((double) tp.tv_sec + (double) tp.tv_usec * 1.e-6); // 返回当前时间
}
int main(int argc, char** argv) {
printf("%s Starting...\n", argv[0]); // 打印提示信息
// 设置device
int dev = 0; // 定义device
cudaDeviceProp deviceProp; // 定义deviceProp结构体
// CHECK(cudaGetDeviceProperties(&deviceProp, dev)); // 获取deviceProp结构体
cudaGetDeviceProperties(&deviceProp, dev); // 获取deviceProp结构体
printf("Using Device %d: %s\n", dev, deviceProp.name);
// CHECK(cudaSetDevice(dev)); // 设置device
cudaSetDevice(dev); // 设置device
// 设置vector数据大小
int nElem = 1 << 24; // 定义vector大小,左移24位相当于乘以2的24次方
printf("Vector size %d\n", nElem); // 打印vector大小
// 分配主机内存
size_t nBytes = nElem * sizeof(float);
float *h_A, *h_B, *hostRef, *gpuRef; // 定义主机内存指针
h_A = (float *) malloc(nBytes); // 分配主机内存
h_B = (float *) malloc(nBytes); // 分配主机内存
hostRef = (float *) malloc(nBytes); // 分配主机内存,用于存储host端计算结果
gpuRef = (float *) malloc(nBytes); // 分配主机内存,用于存储device端计算结果
// 定义计时器
double iStart, iElaps;
// 初始化主机数据
iStart = cpuSecond(); // 记录开始时间
initialData(h_A, nElem); // 初始化数据
initialData(h_B, nElem); // 初始化数据
iElaps = cpuSecond() - iStart; // 记录结束时间
memset(hostRef, 0, nBytes); // 将hostRef清零
memset(gpuRef, 0, nBytes); // 将gpuRef清零
// 在主机做向量加法
iStart = cpuSecond(); // 记录开始时间
sumArraysOnHost(h_A, h_B, hostRef, nElem); // 在主机上计算
iElaps = cpuSecond() - iStart; // 记录结束时间
printf("sumArraysOnHost Time elapsed %f sec\n", iElaps); // 打印执行时间
// 分配设备全局内存
float *d_A, *d_B, *d_C;
cudaMalloc((float **) &d_A, nBytes);
cudaMalloc((float **) &d_B, nBytes);
cudaMalloc((float **) &d_C, nBytes);
// 拷贝数据到设备
cudaMemcpy(d_A, h_A, nBytes, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, nBytes, cudaMemcpyHostToDevice);
// 在设备端调用kernel
int iLen = 1024;
dim3 block(iLen);
dim3 grid((nElem + block.x - 1) / block.x);
iStart = cpuSecond(); // 记录开始时间
sumArraysOnGPU<<<grid, block>>>(d_A, d_B, d_C); // 调用kernel
cudaDeviceSynchronize(); // 同步device
iElaps = cpuSecond() - iStart; // 记录结束时间
printf("sumArraysOnGPU <<<%d, %d>>> Time elapsed %f sec\n", grid.x, block.x, iElaps); // 打印执行时间
// 拷贝结果到主机
cudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost);
// 检查结果
checkResult(hostRef, gpuRef, nElem);
// 释放设备内存
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
// 释放主机内存
free(h_A);
free(h_B);
free(hostRef);
free(gpuRef);
return 0;
}
输出结果,如下所示:
Using Device 0: NVIDIA GeForce RTX 3090
Vector size 16777216
sumArraysOnHost Time elapsed 0.059000 sec
sumArraysOnGPU <<<16384, 1024>>> Time elapsed 0.001000 sec
Arrays match.
2.用nvprof工具计时(已过时)
nvprof命令行工具可以从应用程序的CPU和GPU活动中获取时间线信息,包括内核执行、内存传输以及CUDA API的调用。使用语法如下所示:
$ nvprof [nvprof_args] <application> [application_args]
$ nvprof --help
$ nvprof ./sumArraysOnGPU-timer
遇到这个错误,将C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.8\extras\CUPTI\lib64添加到Path环境变量中即可,如下所示:


说明:对于计算能力为8.0及更高版本的设备,不支持使用nvprof。对于GPU跟踪和CPU采样,使用NVIDIA Nsight Systems;对于GPU分析,使用NVIDIA Nsight Compute。
这部分还不熟悉,先简要介绍,后续深入研究。Nsight是NVIDIA面相开发者提供的开发工具套件,能提供深入的跟踪、调试、评测和分析,以优化跨NVIDIA GPU和CPU的复杂计算应用程序。Nsight主要包含Nsight System、Nsight Compute、Nsight Graphics三部分。
(1)Nsight System
所有与NVIDIA GPU相关的程序开发都可以从Nsight System开始以确定最大的优化机会。Nsight System给开发者一个系统级别的应用程序性能的可视化分析。开发人员可以优化瓶颈,以便在任意数量或大小的CPU和GPU之间实现高效扩展[4]。
(2)Nsight Compute
Nsight Compute是一个CUDA应用程序的交互式kernel分析器。它通过用户接口和命令行工具的形式提供了详细的性能分析度量和API调试。Nsight Compute还提供了定制化的和数据驱动的用户接口和度量集合,可以使用分析脚本对这些界面和度量集合进行扩展,以获得后处理的结果[5]。
(3)Nsight Graphics
Nsight Graphics是一个用于调试、评测和分析Microsoft Windows和Linux上的图形应用程序。它允许您优化基于Direct3D 11,Direct3D 12,DirectX,Raytracing 1.1,OpenGL,Vulkan和KHR Vulkan Ray Tracing Extension的应程序的性能[6]。
3.CUDA数据类型
CUDA支持多种数据类型,包括标准的C/C++数据类型以及特定于CUDA的数据类型。常见的CUDA数据类型,如下所示:
(1)基本数据类型(与C/C++相似)
int
float
double
char
unsigned int
short
long
unsigned char
unsigned short
unsigned long
bool
void
signed int或signed
signed char
signed short
signed long
signed long long
unsigned long long
(2)向量数据类型
int1, int2, int3, int4: 1到4个整数元素的向量。
float1, float2, float3, float4: 1到4个浮点数元素的向量。
double1, double2, double3, double4: 1到4个双精度浮点数元素的向量。
(3)复数数据类型
cuComplex: 单精度复数。
cuDoubleComplex: 双精度复数。
(4)CUDA数据类型修饰符
__device__: 用于声明在设备上执行的函数或变量。
__constant__: 用于声明常量内存。
__shared__: 用于声明共享内存。
__global__: 用于声明全局内核函数。
(5)CUDA特定的数据类型
dim3: 三维坐标,通常用于线程和块的索引。
cudaStream_t: 用于管理CUDA流。
cudaEvent_t: 用于事件同步。
texture<...>: 用于声明纹理内存,支持不同的数据类型和维度。
除此之外CUDA还支持通过typedef和struct等方式定义自定义数据类型,以满足特定应用程序的需求。
4.C++数据类型
C++中数据类型完整列表,包括基本数据类型、复合数据类型和一些特殊数据类型,如下所示:
(1)基本数据类型
int
float
double
char
bool
void
wchar_t(宽字符类型)
short(或short int)
long(或long int)
long long(或long long int)
unsigned int
unsigned char
unsigned short
unsigned long
unsigned long long
(2)复合数据类型
array(数组)
struct(结构体)
union(联合体)
enum(枚举)
class(类)
(3)其它数据类型
signed(通常与int、char、short和long配合使用,表示有符号类型)
auto(C++11引入的自动类型推导)
decltype(C++11引入的类型推导)
nullptr(C++11引入的空指针)
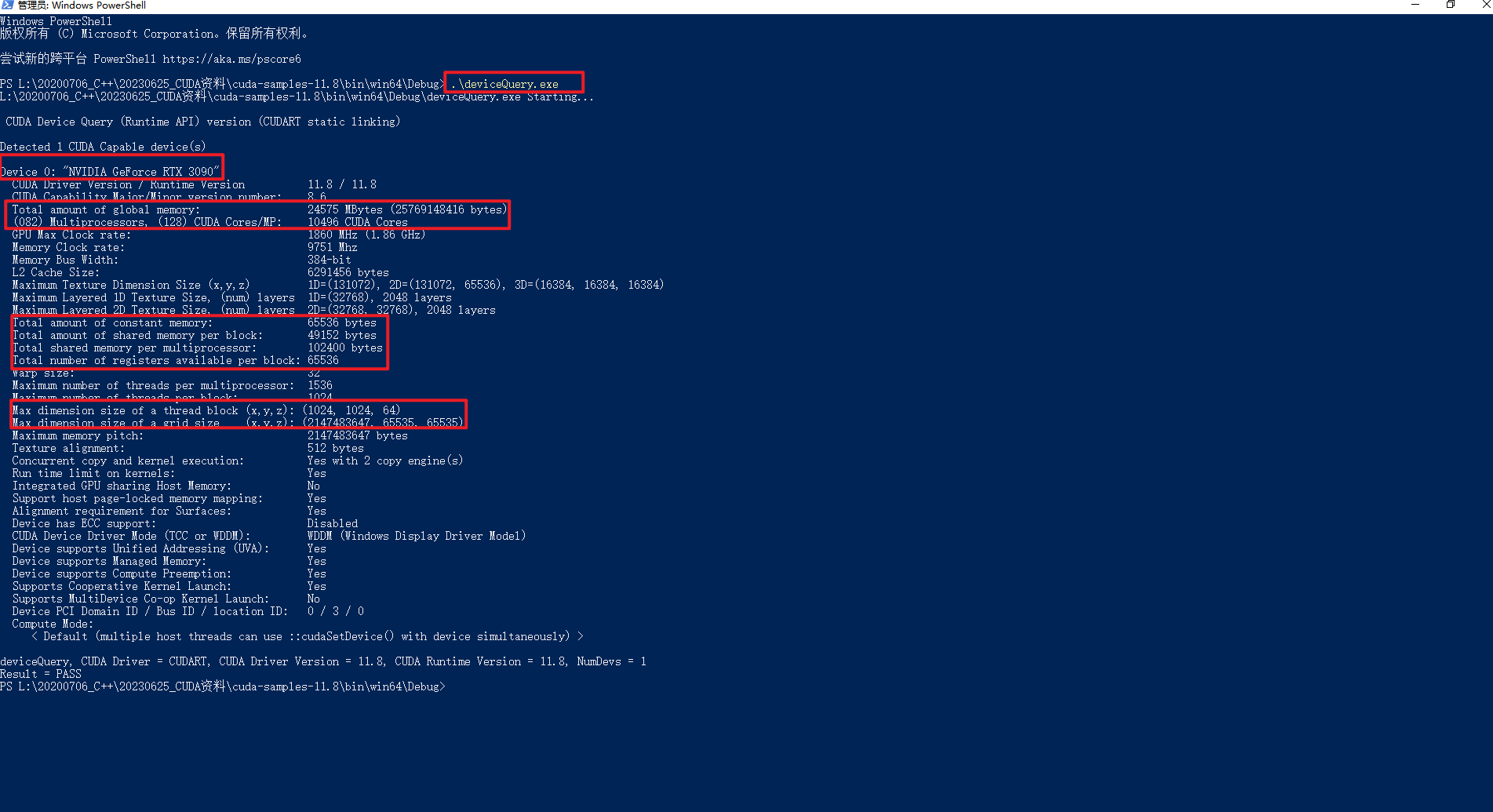
5.通过deviceQuery.exe查下设备信息
因为本地安装CUDA 11.8版本,所以下载https://github.com/NVIDIA/cuda-samples/releases/tag/v11.8,然后使用VS2022打开Samples_VS2022.sln编译,如下所示:

执行.\deviceQuery.exe后可以看到很多熟面孔的常量信息,如下所示:
参考文献:
[1]NVIDIA Developer Tools:https://developer.nvidia.com/tools-overview
[2]《CUDA C编程权威指南》
[3]使用Nsight工具分析优化应用程序:https://cloud.baidu.com/doc/GPU/s/el8mizux4
[4]https://developer.nvidia.com/nsight-systems
[5]https://developer.nvidia.com/nsight-compute
[6]https://developer.nvidia.com/nsight-graphics
[7]给核函数计时:https://github.com/ai408/nlp-engineering/tree/main/20230917_NLP工程化/20231004_高性能计算/20231003_CUDA编程/20231003_CUDA_C编程权威指南/2-CUDA编程模型/2.2-给核函数计时
CUDA C编程权威指南:2.2-给核函数计时的更多相关文章
- 『CUDA C编程权威指南』第二章编程题选做
第一题 设置线程块中线程数为1024效果优于设置为1023,且提升明显,不过原因未知,以后章节看看能不能回答. 第二题 参考文件sumArraysOnGPUtimer.cu,设置block=256,新 ...
- 读《Android编程权威指南》
因为去年双十二购买了一折的<Android 编程权威指南(第一版)>,在第二版出来后图灵社区给我推送了第二版的优惠码,激动之余就立马下单购买电子书,不得不说Big Nerd Ranch G ...
- 《Android编程权威指南》
<Android编程权威指南> 基本信息 原书名:Android programming: the big nerd ranch guide 原出版社: Big Nerd Ranch Gu ...
- Swift编程权威指南第2版 读后收获
自从参加工作一直在用OC做iOS开发.在2015年的时候苹果刚推出swift1.0不久,当时毕竟是新推出的语言,大家也都很有激情的学习.不过在学完后发现很难在实际项目中使用,再加上当时公司项目都是基于 ...
- 《Android编程权威指南》PhotoGallery应用梳理
PhotoGalley是<Android编程权威指南>书中另外一个重要的应用.
- 《Android编程权威指南》CriminalIntent项目梳理
相信很多新手或者初级开发人员都已经买了第2版的<Android编程权威指南>, 这本书基于Android Studio开发,对入门人员来说是很好的选择,但是很可惜的是, 在完成一个项目后, ...
- 使用最新AndroidStudio编写Android编程权威指南(第3版)中的代码会遇到的一些问题
Android编程权威指南(第3版)这本书是基于Android7.0的,到如今已经过于古老,最新的Android版本已经到10,而这本书的第四版目前还没有正式发售,在最近阅读这本书时,我发现这本书的部 ...
- Android编程权威指南第三版 第32章
版权声明:本文为博主原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明. 本文链接:https://blog.csdn.net/qq_35564145/article/de ...
- Android编程权威指南(第2版)--第16章 使用intent拍照 挑战练习
16.7挑战练习:优化照片显示 新建dialog_photo.xml 1234567891011121314 <?xml version="1.0" encoding=&qu ...
- Android编程权威指南(第三版)- 2.8 挑战练习:添加后退按钮
package com.example.geoquiz; import android.support.v7.app.AppCompatActivity; import android.os.Bund ...
随机推荐
- Docker 中的 .NET 异常了怎么抓 Dump
一:背景 1. 讲故事 有很多朋友跟我说,在 Windows 上看过你文章知道了怎么抓 Crash, CPU爆高,内存暴涨 等各种Dump,为什么你没有写在 Docker 中如何抓的相关文章呢?瞧不上 ...
- go web学习(四)
跟着b站https://space.bilibili.com/361469957 杨旭老师学习做的笔记 中间件 什么是中间件 请求----> 中间件 ----> Handler 响应 &l ...
- OpenCV计算机视觉学习(14)——浅谈常见图像后缀(png, jpg, bmp)的区别(opencv读取语义分割mask的坑)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 本来 ...
- Mysql生成测试数据函数
1.查看设置是否允许创建函数系统参数 show variables like 'log_bin_trust_function_creators'; 2.临时设置允许创建函数系统参数 set globa ...
- Spring-Bean实例化三种的方式
Bean实例化三种方式 无参构造实例化(重点) 工厂静态方法实例化 工厂实例方法实例化 工厂静态方法实例化 1.编写接口 package com.my; public interface UserDa ...
- FreeBSD 内核模块和硬盘相关
查看已加载的内核模块 使用命令:kldstat 加载驱动: kldload xx 查看识别到的硬盘 使用命令:dmesg | grep sector freeBSD 查看硬件信息 使用命令:dmesg ...
- 2022-1-11 控件学习3 文本渲染、TabIndex、Border、Slider、ProgressBar、
WPF文本渲染 TextOptions.TextFormattingMode:默认值Ideal大部分是好用的,但是非常小的文本使用Display渲染会好一些 TextRenderMode:使用抗锯齿 ...
- C#byte数组获取每一位值
获取byte中每一位的值 byte byData = 0x36; int n0, n1, n2, n3, n4, n5, n6, n7; n0 = (byData & 0x01) == 0x0 ...
- Jmeter+Ant+Jenkins接口自动化框架(续)
前段时间给公司内部项目搭建了一套接口自动化框架,基于实际使用,需要配置自动发送邮件功能,将 执行结果发送给相关负责人.Jenkins本身也提供了一个邮件通知功能,但在提供详细的邮件内容.自定义邮 件格 ...
- Java并发(十五)----synchronized解决共享的问题
为了避免临界区的竞态条件发生,有多种手段可以达到目的. 阻塞式的解决方案:synchronized,Lock 非阻塞式的解决方案:原子变量 此次介绍使用阻塞式的解决方案:synchronized,来解 ...