Ubuntu14.04安装 ROS 安装步骤和问题总结
参考:
1.http://wiki.ros.org/indigo/Installation/Ubuntu
2.安装出现依赖库问题:
https://answers.ros.org/question/310473/ros-indigo-installation-dependency-issue/
首先看好自己的版本对应:(本人是Ubuntu14.04 对应的就是ROS Indigo)

step1:搜索Software&updates 使用清华的源文件
http://wiki.ros.org/ROS/Installation/UbuntuMirrors#Tsinghua_University

STEP2
sudo apt-get update && sudo apt-get install dpkg
就是一般因为dpkg版本低
需要更新 否则出现依赖库问题:
所以这一步相当重要,曾经被卡过得难受的一、塌糊涂
可能错误点:
(一定要有此步,如果跳过将会出现依赖库错误,依赖库错误如下:
Reading package lists... Done
Building dependency tree
Reading state information... Done
You might want to run 'apt-get -f install' to correct these:
The following packages have unmet dependencies:
python-rosdep : Depends: python-rosdistro (>= 0.4.0) but it is not going to be installed
ros-indigo-desktop-full : Depends: ros-indigo-desktop but it is not going to be installed
Depends: ros-indigo-perception but it is not going to be installed
Depends: ros-indigo-simulators but it is not going to be installed
Depends: ros-indigo-urdf-tutorial but it is not going to be installed
E: Unmet dependencies. Try 'apt-get -f install' with no packages (or specify a solution).
此时如果按照他的提示使用apt-get -f install 会出现:
dpkg-deb: error: archive '/var/cache/apt/archives/python-rosdistro-modules_0.7.0-1_all.deb' has premature member 'control.tar.xz' before 'control.tar.gz', giving up
dpkg: error processing archive /var/cache/apt/archives/python-rosdistro-modules_0.7.0-1_all.deb (--unpack):
subprocess dpkg-deb --control returned error exit status 2
dpkg-deb: error: archive '/var/cache/apt/archives/python-rosdistro_0.7.0-100_all.deb' has premature member 'control.tar.xz' before 'control.tar.gz', giving up
dpkg: error processing archive /var/cache/apt/archives/python-rosdistro_0.7.0-100_all.deb (--unpack):
subprocess dpkg-deb --control returned error exit status 2
Errors were encountered while processing:
/var/cache/apt/archives/python-rosdistro-modules_0.7.0-1_all.deb
/var/cache/apt/archives/python-rosdistro_0.7.0-100_all.deb
E: Sub-process /usr/bin/dpkg returned an error code (1)
)
STEP3
设置url
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
STEP4设置完之后更新一下
sudo apt-get update
STEP5安装ROS(注意对应的版本)
sudo apt-get install ros-indigo-desktop-full
STEP6
初始化rosdep
sudo rosdep init
rosdep update
可能错误点:
这里的rosdep update 可能会显示错误:
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
ERROR: error loading sources list:
The read operation timed out
网络问题,多尝试几次就ok了。或者换个网络。
STEP7设置环境变量
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
STEP8安装插件rosinsatll
sudo apt-get install python-rosinstall
STEP9测试ROS安装是否成功
1.启动ROS环境:
roscore
2.测试一下
(1)启动一个终端
roscore
启动服务。
(2)再启动一个终端
rosrun turtlesim turtlesim_node __name:=my_turtle
(3)再再启动一个终端,键盘控制turtlesim
rosrun turtlesim turtle_teleop_key
效果如图:
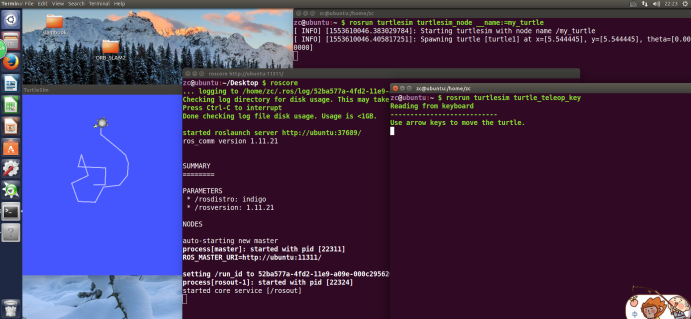
鼠标必须放在第三个控制小乌龟运动的终端上才行
Ubuntu14.04安装 ROS 安装步骤和问题总结的更多相关文章
- Ubuntu14.04 Django Mysql安装部署全过程
Ubuntu14.04 Django Mysql安装部署全过程 一.简要步骤.(阿里云Ubuntu14.04) Python安装 Django Mysql的安装与配置 记录一下我的部署过程,也方便 ...
- Ubuntu14.04(64位)安装ATI_Radeon_R7_M265显卡驱动
电脑型号:Dell inspiron 14-5447 笔记本 显卡配置:集成显卡Intel核心显卡,Cpu是i5-4210U;独立显卡ATI_Radeon_R7_M265 网上关于ATI/Intel双 ...
- ubuntu14.04下编译安装ambari-2.4.2.0
ubuntu14.04下编译安装ambari-2.4.2.0 编译前的准备工作 准备工作有: 系统参数 系统依赖(编译环境) 离线安装包 java环境 maven环境 Nodejs环境 git环境 a ...
- Ubuntu14.04下Ambari安装搭建部署大数据集群(图文分五大步详解)(博主强烈推荐)
不多说,直接上干货! 写在前面的话 (1) 最近一段时间,因担任我团队实验室的大数据环境集群真实物理机器工作,至此,本人秉持负责.认真和细心的态度,先分别在虚拟机上模拟搭建ambari(基于CentO ...
- ubuntu14.04下手动安装eclipse
ubuntu14.04下手动安装eclipse 第一步: 安装jdk 第二步: 下载eclipse,假设下载的文件文件名为eclipse.tar.gz 第三步: 解压 sudo -zxvf ./ecl ...
- ubuntu14.04 下手动安装java jdk
ubuntu14.04 下手动安装java jdk 第一步: 下载jdk.tar.gz (这里假设下载的文件名为jdk.tar.gz) 第二步: 解压 sudo tar -zxvf ./jdk.tar ...
- ubuntu14.04 64位 安装Tomcat
ubuntu14.04 64位 安装Tomcat 1 下载Tomcat 在htt://www.tomcat.apache.org官网上下载apache-tomcat-7.0.57.tar.gz 2 解 ...
- ubuntu14.04 64位 安装eclipse
ubuntu14.04 64位 安装eclipse 1 在官网上下载eclipse http://www.eclipse.org/downloads/下载eclipse-jee-luna-SR1-li ...
- ubuntu14.04 64位 安装JDK1.7
ubuntu14.04 64位 安装JDK1.7 1 新建文件夹 youhaidong@youhaidong:~$ sudo mkdir /usr/lib/jvm 2 解压文件 youhaidong@ ...
- virtualbox谨记:win7上只有4.3.x的版本支持ubuntu14.04.3虚拟机安装Oracle Rac,其他的版本3.x和5.0.2(至2015-08-30)均不可以
virtualbox谨记:win7上只有4.3.x的版本支持ubuntu14.04.3虚拟机安装Oracle Rac,其他的版本3.x和5.0.2(至2015-08-30)均不可以
随机推荐
- JDK8.0接口中的默认方法和静态方法
我们在接口中通常定义的方法是抽象方法,即没有方法体,只有返回值类型和方法名:(public abstract) void Method(); 类在实现接口的时候必须重写抽象方法才可以 jdk8中新加的 ...
- 剑指Offer 59. 按之字形顺序打印二叉树 (二叉树)
题目描述 请实现一个函数按照之字形打印二叉树,即第一行按照从左到右的顺序打印,第二层按照从右至左的顺序打印,第三行按照从左到右的顺序打印,其他行以此类推. 题目地址 https://www.nowco ...
- C# Ini、Json、Xml 封装类
1.Ini是什么?(我对它的理解,用于存储用户配置信息的文件,该文件放在用户电脑...) INI文件是一个无固定标准格式的配置文件.它以简单的文字与简单的结构组成,常常使用在Windows操作系统,或 ...
- 一道笔试题来理顺Java中的值传递和引用传递
题目如下: private static void change(StringBuffer str11, StringBuffer str12) { str12 = str11; str11 = ...
- 浅谈MVC中的service层(转)
概述 mvc框架由model,view,controller组成,执行流程一般是:在controller访问model获取数据,通过view渲染页面. mvc模式是web开发中的基础模式,采用的是分层 ...
- less--入门
Less(Learner Style Sheets)是向后兼容css扩展语言. 变量(Variables) @width: 10px; @height: @width + 10px; header{ ...
- Codeforces 977E:Cyclic Components(并查集)
题意 给出nnn个顶点和mmm条边,求这个图中环的个数 思路 利用并查集的性质,环上的顶点都在同一个集合中 在输入的时候记录下来每个顶点的度数,查找两个点相连,且度数均为222的点,如果这两个点的父节 ...
- C# 关于 DataTable 的一些使用
1.抽取其中的distinct数据 DataTable dt; DataView dv = dt.DefaultView; //ToTable()的第一个参数为是否DISTINCT DataTable ...
- JS ajax请求参数格式( formData 、serialize)
$("#importBtn").click(function(){ if($("#conId").val() == ""){ alert(& ...
- jQuery汇总
closest() 方法返回被选元素的第一个祖先元素. $("span").closest("ul")返回 <span> 的第一个祖先元素,是一个 ...