linux的串口驱动分析
1、串口驱动中的数据结构
• UART驱动程序结构:struct uart_driver 驱动
• UART端口结构: struct uart_port 串口
• UART相关操作函数结构: struct uart_ops 串口操作函数集
• UART状态结构: struct uart_state 串口状态
• UART信息结构: struct uart_info 串口信息
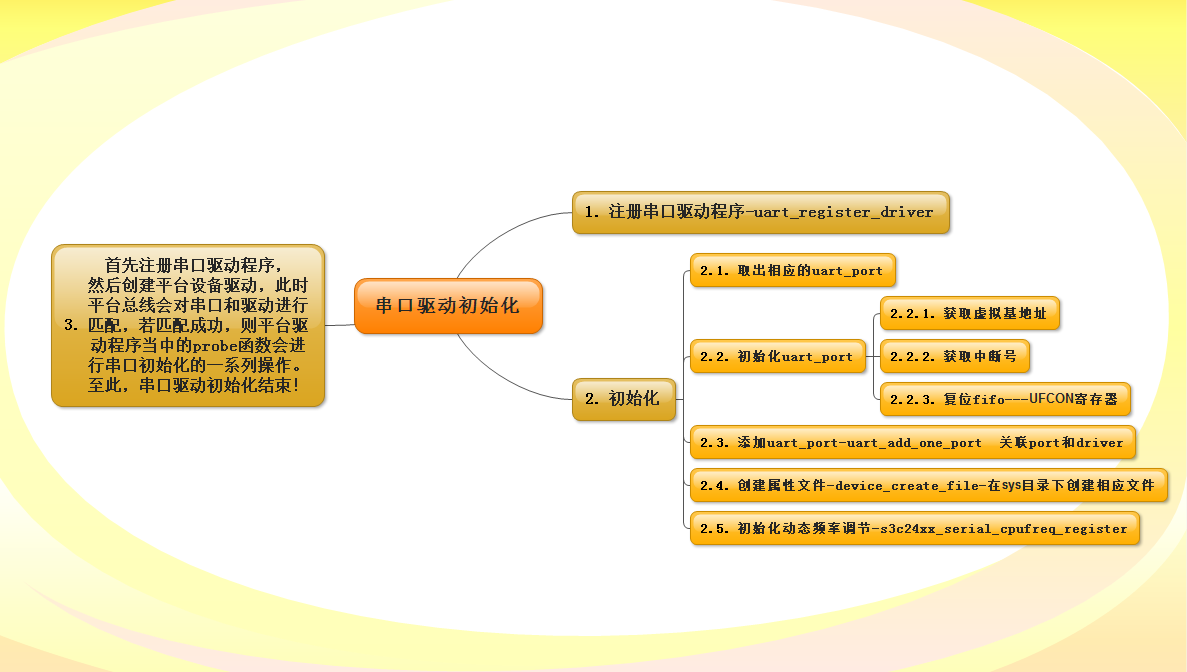
2、串口驱动程序-初始化
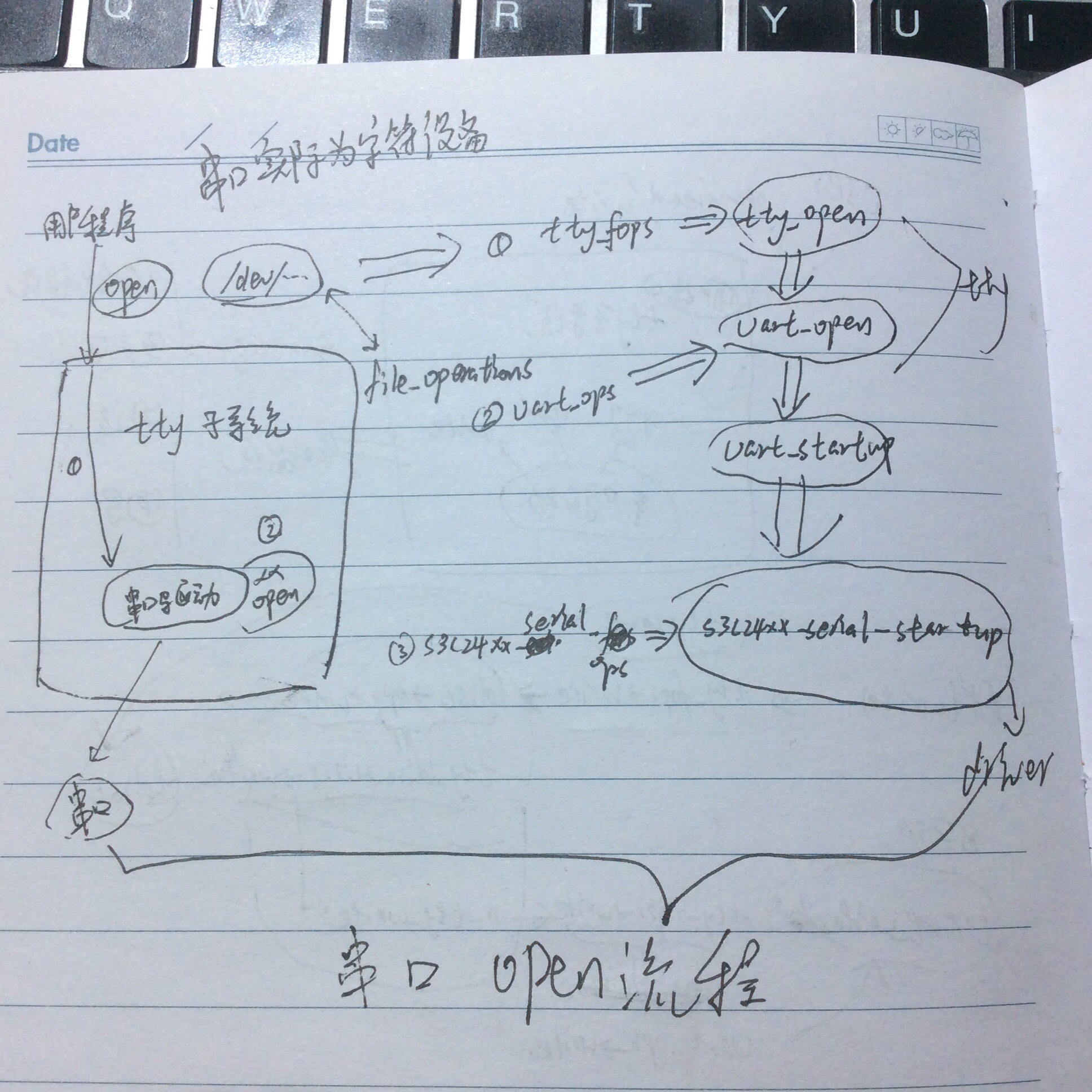
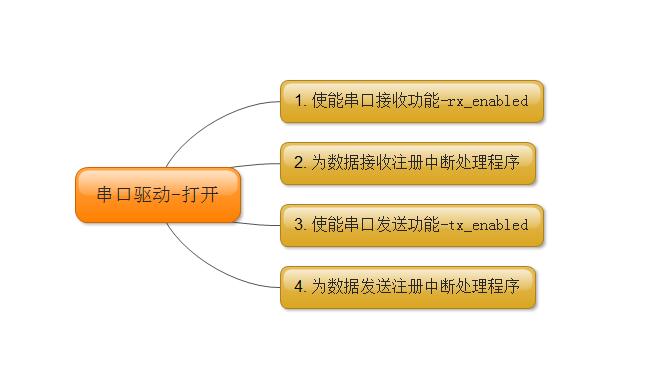
3、串口驱动分析-打开设备
static int s3c24xx_serial_startup(struct uart_port *port)
{
struct s3c24xx_uart_port *ourport = to_ourport(port);
int ret; dbg("s3c24xx_serial_startup: port=%p (%08lx,%p)\n",
port->mapbase, port->membase); rx_enabled(port) = ; ret = request_irq(ourport->rx_irq, s3c24xx_serial_rx_chars, ,
s3c24xx_serial_portname(port), ourport); if (ret != ) {
printk(KERN_ERR "cannot get irq %d\n", ourport->rx_irq);
return ret;
} ourport->rx_claimed = ; dbg("requesting tx irq...\n"); tx_enabled(port) = ; ret = request_irq(ourport->tx_irq, s3c24xx_serial_tx_chars, ,
s3c24xx_serial_portname(port), ourport); if (ret) {
printk(KERN_ERR "cannot get irq %d\n", ourport->tx_irq);
goto err;
} ourport->tx_claimed = ; dbg("s3c24xx_serial_startup ok\n"); /* the port reset code should have done the correct
* register setup for the port controls */ return ret; err:
s3c24xx_serial_shutdown(port);
return ret;
}
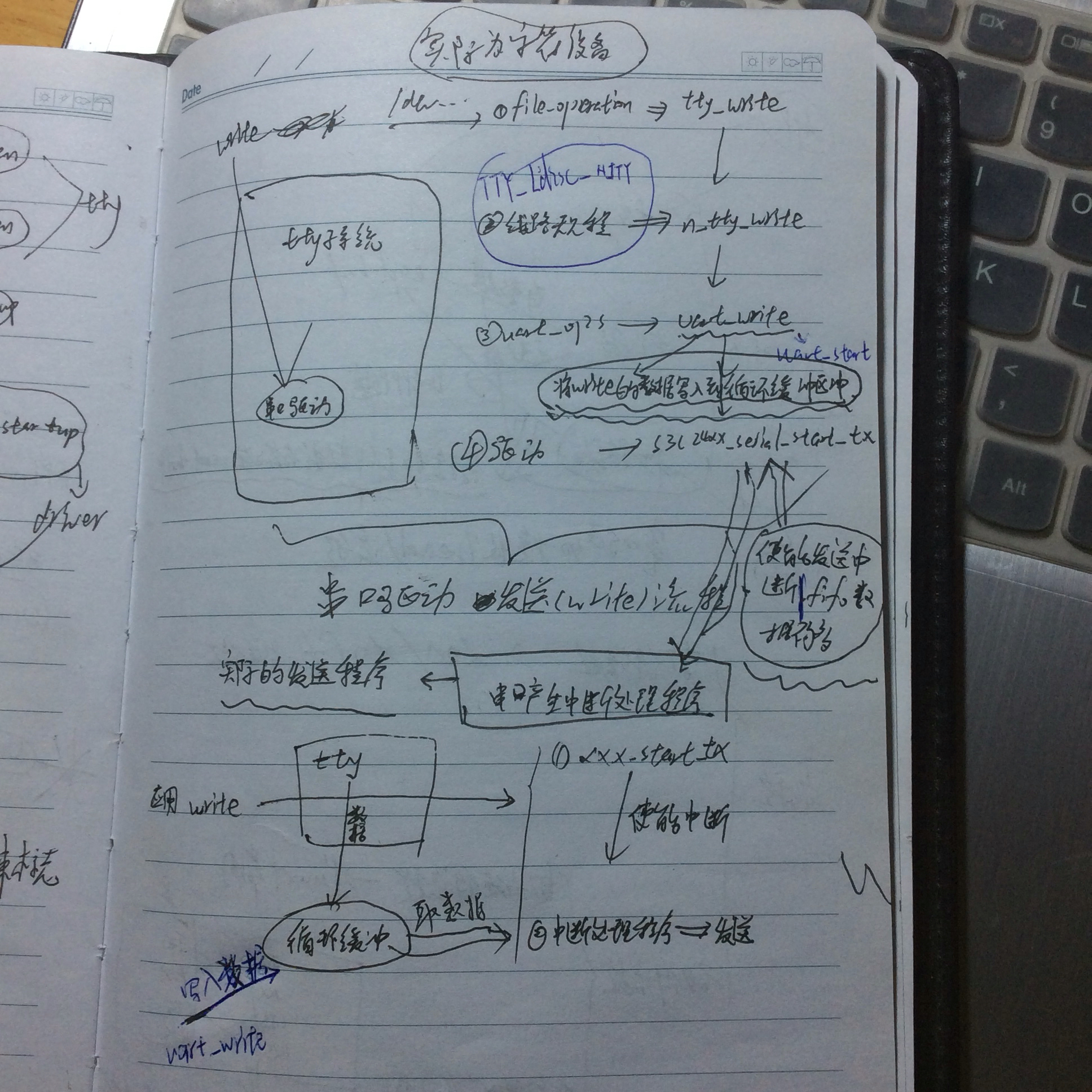
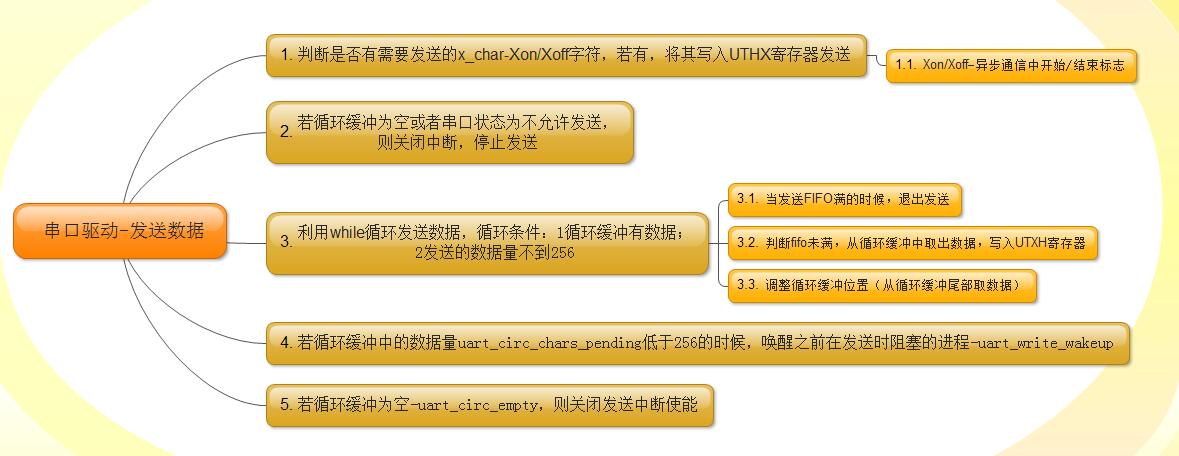
3、串口驱动程序-数据发送
static void s3c24xx_serial_start_tx(struct uart_port *port)
{
struct s3c24xx_uart_port *ourport = to_ourport(port);
static int a =;//temp
if (port->line == ) {
// printk("485_start_tx\n"); if(a){
s3c_gpio_cfgpin(S3C64XX_GPK(), S3C_GPIO_SFN());
a=;
}
gpio_set_value(S3C64XX_GPK(), );
}
if (!tx_enabled(port)) {
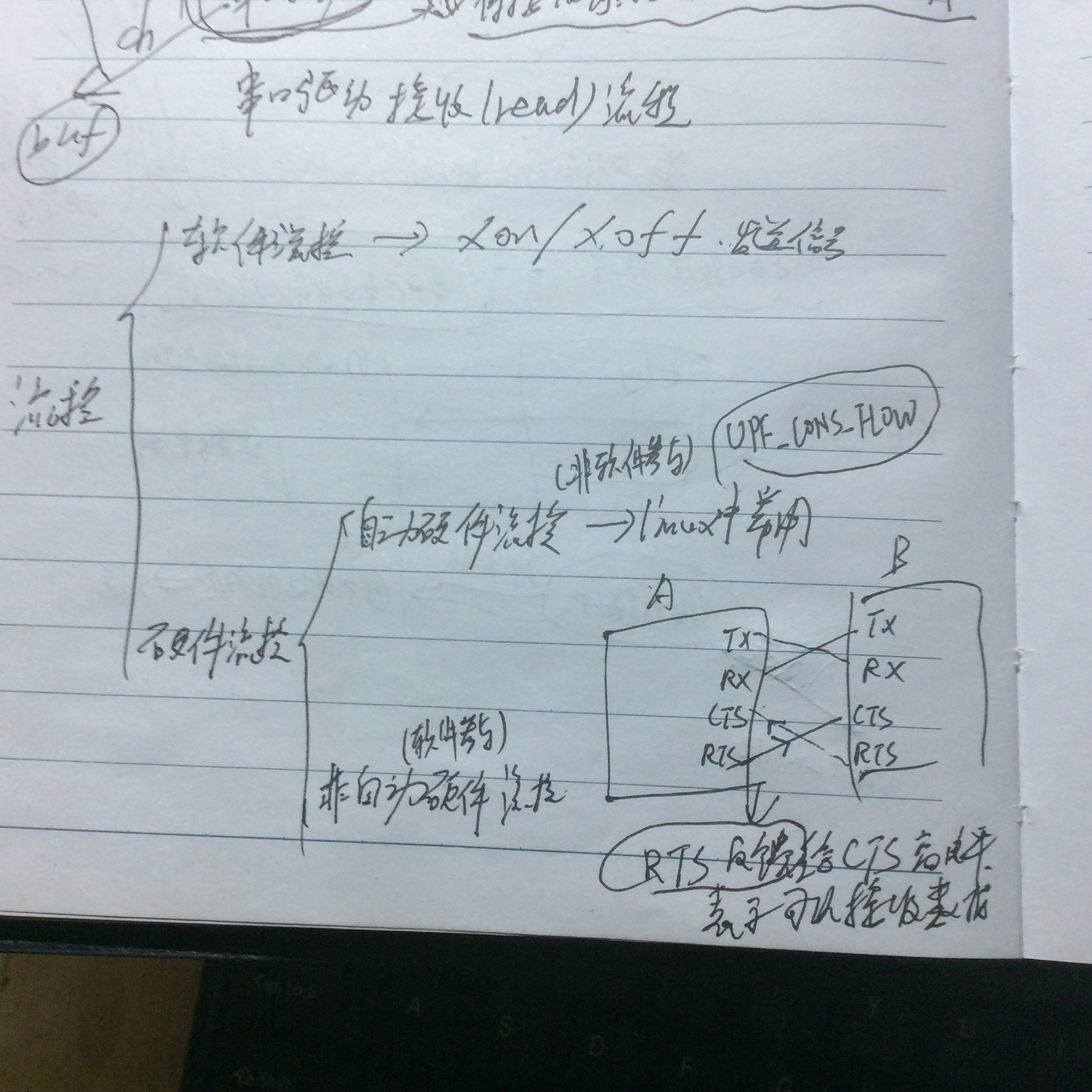
if (port->flags & UPF_CONS_FLOW)
s3c24xx_serial_rx_disable(port); enable_irq(ourport->tx_irq);
tx_enabled(port) = ;
}
}
static irqreturn_t s3c24xx_serial_tx_chars(int irq, void *id)
{
struct s3c24xx_uart_port *ourport = id;
struct uart_port *port = &ourport->port;
struct circ_buf *xmit = &port->state->xmit;
int count = ; if (port->x_char) {
wr_regb(port, S3C2410_UTXH, port->x_char);
port->icount.tx++;
port->x_char = ;
goto out;
} /* if there isn't anything more to transmit, or the uart is now
* stopped, disable the uart and exit
*/ if (uart_circ_empty(xmit) || uart_tx_stopped(port)) {
s3c24xx_serial_stop_tx(port);
goto out;
} /* try and drain the buffer... */ while (!uart_circ_empty(xmit) && count-- > ) {
if (rd_regl(port, S3C2410_UFSTAT) & ourport->info->tx_fifofull)
break; wr_regb(port, S3C2410_UTXH, xmit->buf[xmit->tail]);
xmit->tail = (xmit->tail + ) & (UART_XMIT_SIZE - );
port->icount.tx++;
} if (uart_circ_chars_pending(xmit) < WAKEUP_CHARS)
uart_write_wakeup(port); if (uart_circ_empty(xmit))
s3c24xx_serial_stop_tx(port); out:
return IRQ_HANDLED;
}
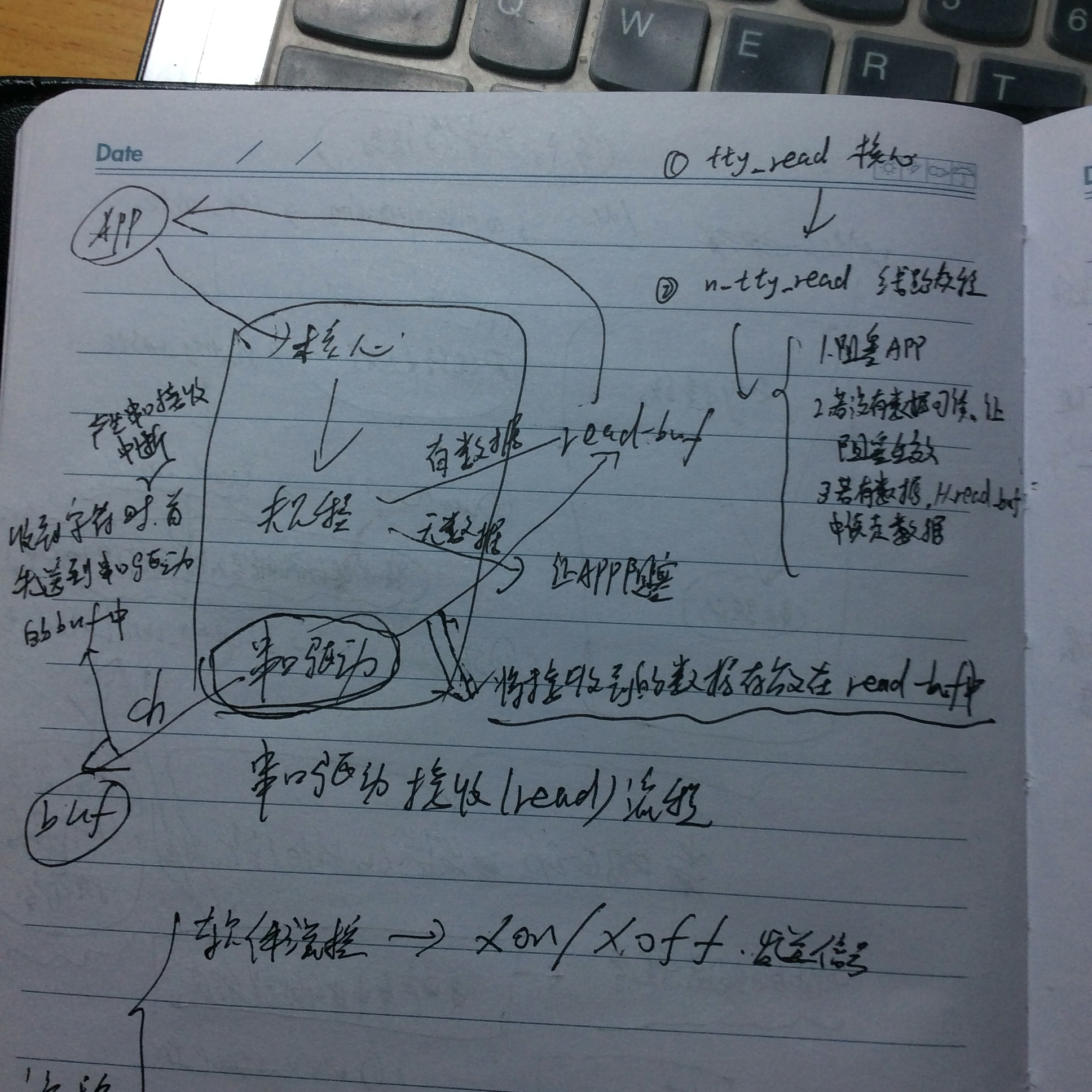
4、串口驱动程序-数据接收
s3c24xx_serial_rx_chars(int irq, void *dev_id)
{
struct s3c24xx_uart_port *ourport = dev_id;
struct uart_port *port = &ourport->port;
struct tty_struct *tty = port->state->port.tty;
unsigned int ufcon, ch, flag, ufstat, uerstat;
int max_count = ; while (max_count-- > ) {
ufcon = rd_regl(port, S3C2410_UFCON);
ufstat = rd_regl(port, S3C2410_UFSTAT); if (s3c24xx_serial_rx_fifocnt(ourport, ufstat) == )
break; uerstat = rd_regl(port, S3C2410_UERSTAT);
ch = rd_regb(port, S3C2410_URXH); if (port->flags & UPF_CONS_FLOW) {
int txe = s3c24xx_serial_txempty_nofifo(port); if (rx_enabled(port)) {
if (!txe) {
rx_enabled(port) = ;
continue;
}
} else {
if (txe) {
ufcon |= S3C2410_UFCON_RESETRX;
wr_regl(port, S3C2410_UFCON, ufcon);
rx_enabled(port) = ;
goto out;
}
continue;
}
} /* insert the character into the buffer */ flag = TTY_NORMAL;
port->icount.rx++; if (unlikely(uerstat & S3C2410_UERSTAT_ANY)) {
dbg("rxerr: port ch=0x%02x, rxs=0x%08x\n",
ch, uerstat); /* check for break */
if (uerstat & S3C2410_UERSTAT_BREAK) {
dbg("break!\n");
port->icount.brk++;
if (uart_handle_break(port))
goto ignore_char;
} if (uerstat & S3C2410_UERSTAT_FRAME)
port->icount.frame++;
if (uerstat & S3C2410_UERSTAT_OVERRUN)
port->icount.overrun++; uerstat &= port->read_status_mask; if (uerstat & S3C2410_UERSTAT_BREAK)
flag = TTY_BREAK;
else if (uerstat & S3C2410_UERSTAT_PARITY)
flag = TTY_PARITY;
else if (uerstat & (S3C2410_UERSTAT_FRAME |
S3C2410_UERSTAT_OVERRUN))
flag = TTY_FRAME;
} if (uart_handle_sysrq_char(port, ch))
goto ignore_char; uart_insert_char(port, uerstat, S3C2410_UERSTAT_OVERRUN,
ch, flag); ignore_char:
continue;
}
tty_flip_buffer_push(tty); out:
return IRQ_HANDLED;
}

附:linux系统中一般的流控技术
linux的串口驱动分析的更多相关文章
- linux串口驱动分析
linux串口驱动分析 硬件资源及描写叙述 s3c2440A 通用异步接收器和发送器(UART)提供了三个独立的异步串行 I/O(SIO)port,每一个port都能够在中断模式或 DMA 模式下操作 ...
- linux UART串口驱动开发文档
转:http://www.360doc.com/content/10/0417/18/829197_23519037.shtml linux UART串口驱动开发文档时间:2010-01-09 14: ...
- linux串口驱动分析——发送数据
一.应用程序中write函数到底层驱动历程 和前文提到的一样,首先先注册串口,使用uart_register_driver函数,依次分别为tty_register_driver,cdev_init函数 ...
- linux串口驱动分析——打开设备
串口驱动是由tty_driver架构实现的.一个应用程序中的函数要操作硬件,首先会经过tty,级级调用之后才会到达驱动之中.本文先介绍应用程序中打开设备的open函数的整个历程. 首先在串口初始化中会 ...
- linux串口驱动分析【转】
转自:http://blog.csdn.net/hanmengaidudu/article/details/11946591 硬件资源及描述 s3c2440A 通用异步接收器和发送器(UART)提供了 ...
- tiny4412 串口驱动分析七 --- log打印的几个阶段之内核启动阶段(earlyprintk)
作者:彭东林 邮箱:pengdonglin137@163.com 开发板:tiny4412ADK+S700 4GB Flash 主机:Wind7 64位 虚拟机:Vmware+Ubuntu12_04 ...
- tiny4412 串口驱动分析四 --- 修改默认的串口输出
作者:彭东林 邮箱:pengdonglin137@163.com 开发板:tiny4412ADK+S700 4GB Flash 主机:Wind7 64位 虚拟机:Vmware+Ubuntu12_04 ...
- tiny4412 串口驱动分析一 --- u-boot中的串口驱动
作者:彭东林 邮箱:pengdonglin137@163.com 开发板:tiny4412ADK+S700 4GB Flash 主机:Wind7 64位 虚拟机:Vmware+Ubuntu12_04 ...
- (linux)MMC 卡驱动分析
最近花时间研究了一下 MMC 卡驱动程序,开始在网上找了很多关于 MMC 卡驱动的分析文章,但大都是在描述各个层,这对于初学者来讲帮助并不大,所以我就打算把自己的理解写下来,希望对大家有用.个人觉得理 ...
随机推荐
- JQuery 插件FlexiGrid 之完全配置与使用
博客分类: Java综合 jQuery配置管理jsonServlet数据结构 自己再做这个的时候.也是找了很多资料..但网上搜索了很多资料. 没有介绍的很全的. 鄙人就在此献丑一下. 来全面的介绍一 ...
- HDU1325
http://acm.split.hdu.edu.cn/showproblem.php?pid=1325 #include<stdio.h> #include<algorithm&g ...
- android menu 开发
menu 分类: 选项菜单(OptionsMenu) 上下文菜单(ContextMenu) 子菜单(SubMenu) 弹出菜单(Popup) 首先说 选项菜单(OptionsMenu) 一.方法介 ...
- mysql的一些心得
1.unsigned修饰整型 ,既为非负数,用此类型可以增加数据长度! 类型 大小 范围(有符号) ...
- 使用postman玩转接口测试
(一)前言: 之前搞自动化接口测试,由于接口的特性,要验证接口返回xml中的数据,所以没找到合适的轮子,就自己用requests造了个轮子,用着也还行,不过就是case管理有些麻烦,近几天又回头看了看 ...
- 数据结构(一)之HelloWord
最近由于学习上面的需要,要重新的看看数据结构方面的知识!当然,我觉得数据结构也非常的重要,下面是我的学习的一点小小的记录,以备日后的查看! 我的环境: 1:操作系统:windows7 2:编码环境:M ...
- SQL 如果存在就更新,如果不存在就添加,使用 Merge 函数(SQL2008版本及以上)
USE [NationalUnion] GO /****** Object: StoredProcedure [dbo].[proc_DataSummary] Script Date: 07/03/2 ...
- Git 使用及原理 总结
1. $git diff origin/master master (show me the changes between the remote master branch and my mast ...
- php文件大小单位转换GB MB KB
private function formatBytes($size){ $units = array('字节','K','M','G','T'); $i = 0; for( ; $size>= ...
- MFC读取XML文件并解析
现在经常会对XML文件进行操作,怎么在MFC下去读和解析XML文件呢?直接上代码: 首先得等在stdafx.h中加入这句,以引入MSXML命名空间 #import <msxml3.dll> ...