卡尔曼滤波— Constant Velocity Model

假设你开车进入隧道,GPS信号丢失,现在我们要确定汽车在隧道内的位置。汽车的绝对速度可以通过车轮转速计算得到,汽车朝向可以通过yaw rate sensor(A yaw-rate sensor is a gyroscopic device that measures a vehicle’s angular velocity around its vertical axis. )得到,因此可以获得X轴和Y轴速度分量Vx,Vy
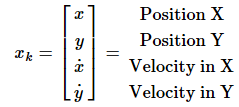
首先确定状态变量,恒速度模型中取状态变量为汽车位置和速度:
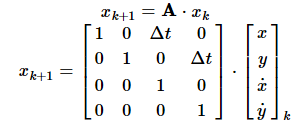
根据运动学定律(The basic idea of any motion models is that a mass cannot move arbitrarily due to inertia):
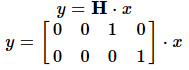
由于GPS信号丢失,不能直接测量汽车位置,则观测模型为:
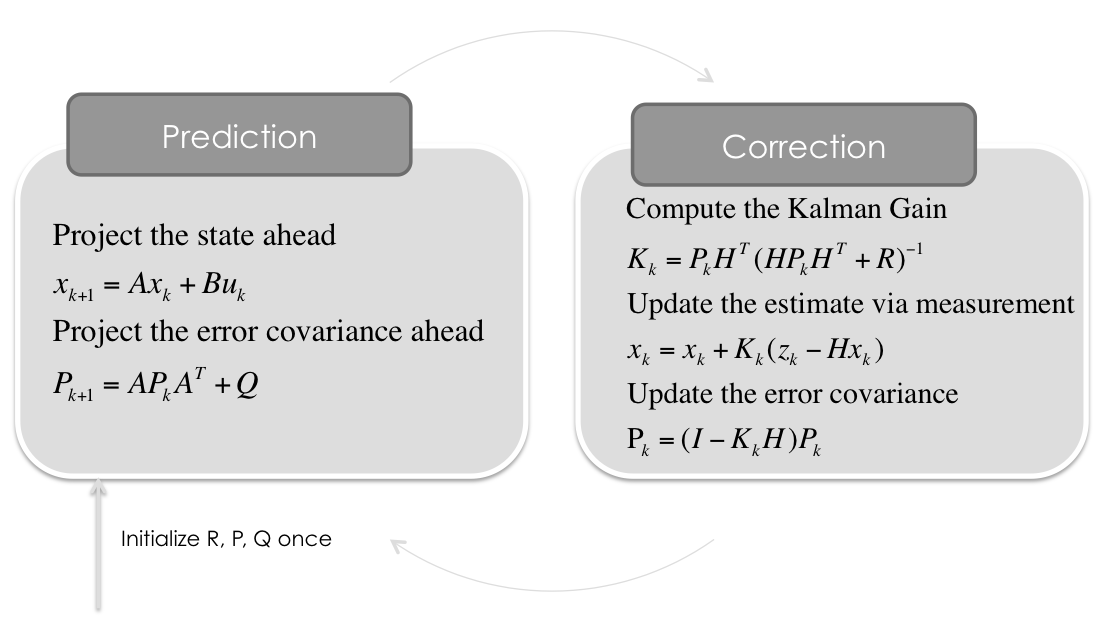
卡尔曼滤波步骤如下图所示:
# -*- coding: utf-8 -*-
import numpy as np
import matplotlib.pyplot as plt # Initial State x0
x = np.matrix([[0.0, 0.0, 0.0, 0.0]]).T # Initial Uncertainty P0
P = np.diag([1000.0, 1000.0, 1000.0, 1000.0]) dt = 0.1 # Time Step between Filter Steps # Dynamic Matrix A
A = np.matrix([[1.0, 0.0, dt, 0.0],
[0.0, 1.0, 0.0, dt],
[0.0, 0.0, 1.0, 0.0],
[0.0, 0.0, 0.0, 1.0]]) # Measurement Matrix
# We directly measure the velocity vx and vy
H = np.matrix([[0.0, 0.0, 1.0, 0.0],
[0.0, 0.0, 0.0, 1.0]]) # Measurement Noise Covariance
ra = 10.0**2
R = np.matrix([[ra, 0.0],
[0.0, ra]]) # Process Noise Covariance
# The Position of the car can be influenced by a force (e.g. wind), which leads
# to an acceleration disturbance (noise). This process noise has to be modeled
# with the process noise covariance matrix Q.
sv = 8.8
G = np.matrix([[0.5*dt**2],
[0.5*dt**2],
[dt],
[dt]])
Q = G*G.T*sv**2 I = np.eye(4) # Measurement
m = 200 # 200个测量点
vx= 20 # in X
vy= 10 # in Y
mx = np.array(vx+np.random.randn(m))
my = np.array(vy+np.random.randn(m))
measurements = np.vstack((mx,my)) # Preallocation for Plotting
xt = []
yt = [] # Kalman Filter
for n in range(len(measurements[0])): # Time Update (Prediction)
# ========================
# Project the state ahead
x = A*x # Project the error covariance ahead
P = A*P*A.T + Q # Measurement Update (Correction)
# ===============================
# Compute the Kalman Gain
S = H*P*H.T + R
K = (P*H.T) * np.linalg.pinv(S) # Update the estimate via z
Z = measurements[:,n].reshape(2,1)
y = Z - (H*x) # Innovation or Residual
x = x + (K*y) # Update the error covariance
P = (I - (K*H))*P # Save states for Plotting
xt.append(float(x[0]))
yt.append(float(x[1])) # State Estimate: Position (x,y)
fig = plt.figure(figsize=(16,16))
plt.scatter(xt,yt, s=20, label='State', c='k')
plt.scatter(xt[0],yt[0], s=100, label='Start', c='g')
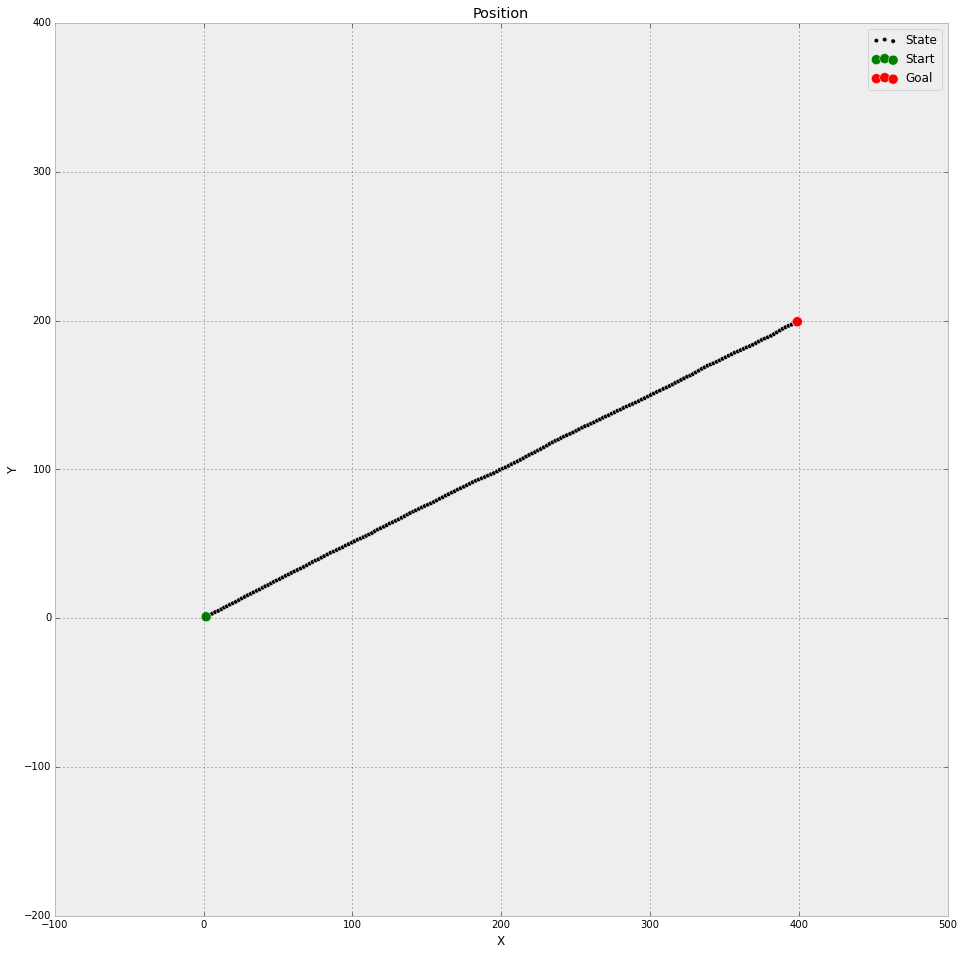
plt.scatter(xt[-1],yt[-1], s=100, label='Goal', c='r') plt.xlabel('X')
plt.ylabel('Y')
plt.title('Position')
plt.legend(loc='best')
plt.axis('equal')
plt.show()
汽车在隧道中的估计位置如下图:
参考
Improving IMU attitude estimates with velocity data
https://zhuanlan.zhihu.com/p/25598462
卡尔曼滤波— Constant Velocity Model的更多相关文章
- 卡尔曼滤波—Simple Kalman Filter for 2D tracking with OpenCV
之前有关卡尔曼滤波的例子都比较简单,只能用于简单的理解卡尔曼滤波的基本步骤.现在让我们来看看卡尔曼滤波在实际中到底能做些什么吧.这里有一个使用卡尔曼滤波在窗口内跟踪鼠标移动的例子,原作者主页:http ...
- (转) Deep Reinforcement Learning: Pong from Pixels
Andrej Karpathy blog About Hacker's guide to Neural Networks Deep Reinforcement Learning: Pong from ...
- Mini-project # 4 - "Pong"___An Introduction to Interactive Programming in Python"RICE"
Mini-project #4 - "Pong" In this project, we will build a version of Pong, one of the firs ...
- RootMotionComputer 根运动计算机
using UnityEngine; using System.Collections; /* * -------------------------------------------------- ...
- Framework for Graphics Animation and Compositing Operations
FIELD OF THE DISCLOSURE The subject matter of the present disclosure relates to a framework for hand ...
- Tracking without bells and whistles
Tracking without bells and whistles 2019-08-07 20:46:12 Paper: https://arxiv.org/pdf/1903.05625 Code ...
- [Elementary Mechanics Using Python-02]Feather in tornado
Problem 9.17 Feather in tornado. In this project you will learn to use Newton's laws and the force m ...
- [UE4]自定义MovementComponent组件
自定义Movement组件 目的:实现自定义轨迹如抛物线,线性,定点等运动方式,作为组件控制绑定对象的运动. 基类:UMovementComponent 过程: 1.创建UCustomMovement ...
- UIScrollview使用
改变内容偏移 - (void)setContentOffset:(CGPoint)contentOffset animated:(BOOL)animated; // animate at const ...
随机推荐
- Nginx防蜘蛛爬虫处理
假定一个场景:某个网站它可能不希望被网络爬虫抓取,例如测试环境不希望被抓取,以免对用户造成误导,那么需要在该网站中申明,本站不希望被抓取.有如下方法: 方法一:修改nginx.conf,禁止网络爬虫的 ...
- TI BLE CC2541的I2C主模式
由于要写TM1680, 写命令跟写数据, 所以需要使用CC2541的I2C, 2541是有硬件I2C的. tm1680.c: #include "tm1680.h" //TM168 ...
- cpu进程调度---RT Throttling【转】
转自:http://book.2cto.com/201302/16291.html RT Throttling是对分配给实时进程的CPU时间进行限制的功能.使用实时调度策略的进程由于bug等出现不可控 ...
- JavaEE基础(二)
1.Java语言基础(常量的概述和使用) A:什么是常量 在程序执行的过程中其值不可以发生改变 B:Java中常量的分类 字面值常量 自定义常量(面向对象部分讲) C:字面值常量的分类 字符串常量 用 ...
- python中split函数的使用
最近学习python,对split函数做了下总结,内容如下:
- mybatis中#{}和${}的区别
1. #将传入的数据都当成一个字符串,会对自动传入的数据加一个双引号.如:order by #user_id#,如果传入的值是111,那么解析成sql时的值为order by "111&qu ...
- Java对象转xml报文和xml报文转Java对象帮助类
import javax.xml.bind.JAXBContext; import javax.xml.bind.JAXBException; import javax.xml.bind.Marsha ...
- js函数自执行
在javascript里,任何function在执行的时候都会创建一个执行上下文,因为function声明的变量和function有可能只在该function内部,这个上下文,在调用function的 ...
- YTU 3004: 栈的基本运算(栈和队列)
3004: 栈的基本运算(栈和队列) 时间限制: 1 Sec 内存限制: 128 MB 提交: 32 解决: 10 题目描述 编写一个程序,实现顺序栈的各种基本运算,主函数已给出,请补充每一种方法 ...
- css不同浏览器兼容性调试 --- 转自: [http://wo.115.com/?ct=detail&id=31733&bid=1018841]
css不同浏览器兼容性调试 IE6.0,IE7.0与Firefox的CSS兼容性问题1.DOCTYPE 影响 CSS 处理 2.FF: div 设置 margin-left, margin-right ...