[SLAM] 02 Some algorithms of 3D reconstruction
链接:http://www.zhihu.com/question/29885222/answer/100043031
1, 首先对某一场景多角度多位置得到很多初始数据,选择其中的某两个来初始化,选定其中一个为空间原点。
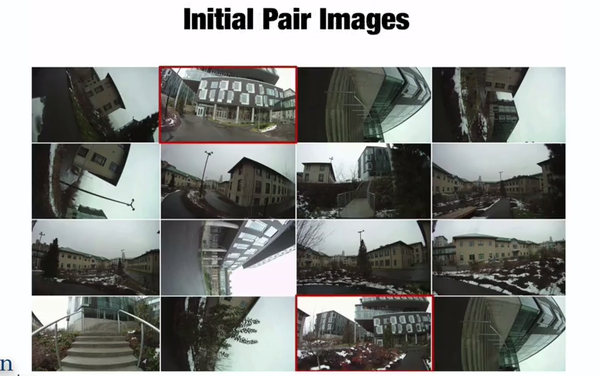
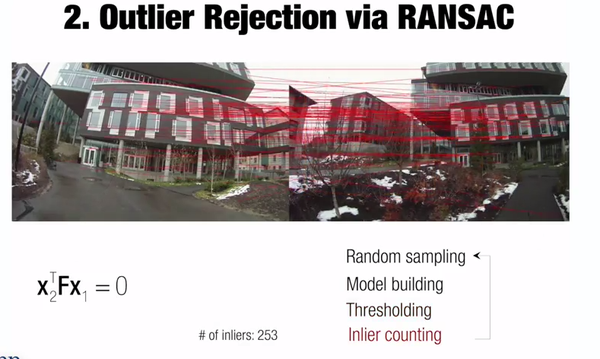
2. 通过SIFT ,SURF等特征点查找匹配之后,用 8点法 和 RANSAC,多次计算两张图之间的Fundamental Matrix,选择其中最好的一个。
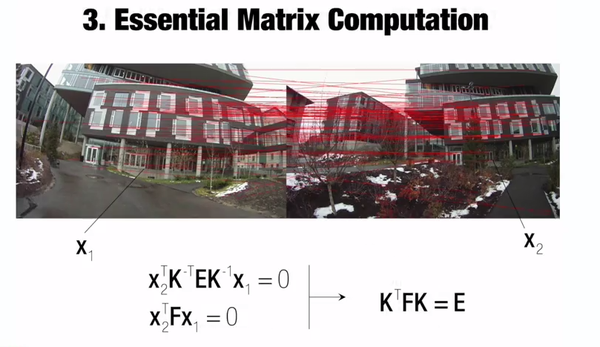
3. 用F-matrix 计算 Essential-matrix
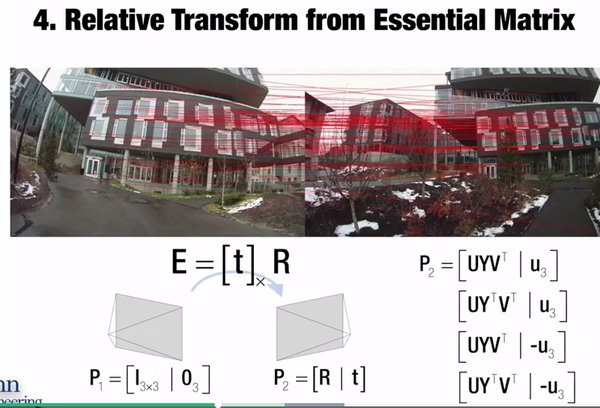
<img src="https://pic3.zhimg.com/ce0c15835abe5cd520d8c70945ce0232_b.png" data-rawwidth="809" data-rawheight="468" class="origin_image zh-lightbox-thumb" width="809" data-original="https://pic3.zhimg.com/ce0c15835abe5cd520d8c70945ce0232_r.png">4, 用E-matrix计算相机的R和T,需要用SVD分解,因为orientation R是一个正交阵。
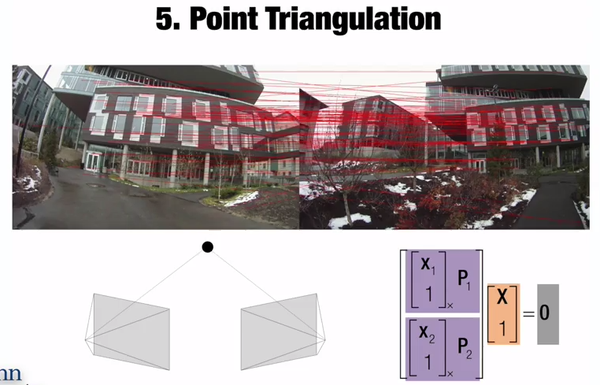
<img src="https://pic1.zhimg.com/6bf0b539b963550054d874f9697524f8_b.png" data-rawwidth="742" data-rawheight="504" class="origin_image zh-lightbox-thumb" width="742" data-original="https://pic1.zhimg.com/6bf0b539b963550054d874f9697524f8_r.png">5, 得到两个相机之间的P矩阵之后,通过对应点,用Triangulation计算对应点的空间坐标。
<img src="https://pic4.zhimg.com/e0b6757903e37599abf74fa0f30f7d0f_b.png" data-rawwidth="762" data-rawheight="489" class="origin_image zh-lightbox-thumb" width="762" data-original="https://pic4.zhimg.com/e0b6757903e37599abf74fa0f30f7d0f_r.png">6. 第三个位置的照片,直接根据已有的上步计算的点,与第三个位置图片上点的对应关系,计算P矩阵。
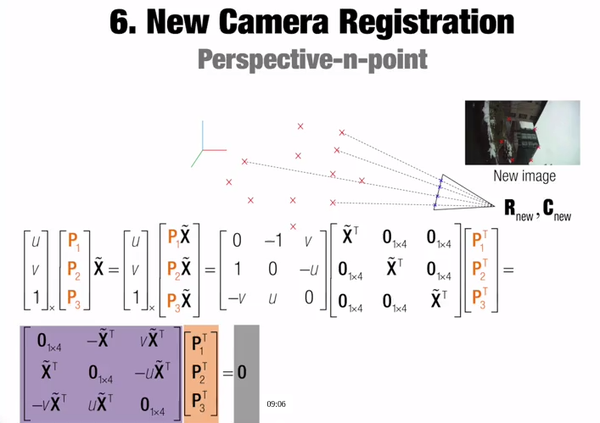
<img src="https://pic3.zhimg.com/08a972d34f7fa4f69bc6730324362b3e_b.png" data-rawwidth="631" data-rawheight="503" class="origin_image zh-lightbox-thumb" width="631" data-original="https://pic3.zhimg.com/08a972d34f7fa4f69bc6730324362b3e_r.png">
------------------------------------------------------------------------------------------------------------
推荐宾大Shi Jianbo教授在Coursera上的公开课 Robotics:Perception
上面所有的截图都来自他最后一次课的视频讲义截图
https://www.coursera.org/learn/robotics-perception/home/welcome
配合视觉圣经 Multiple View Geometry来看简直完美。Ransac, Bundle-adjustment, 2-View, Homography全部都有。一共四周,有线性代数基础(主要是SVD用来解线性方程),作业用Matlab.
第一周作业: Dolly Zoom
第二周作业: 平面摄影几何,广告牌在视频中的投影,类似2D增强现实
第三周作业: 在平面Barcode上通过sift检测特征点,通过H矩阵计算相机位置,做3D增强现实
第四周作业: 3D重建
[SLAM] 02 Some algorithms of 3D reconstruction的更多相关文章
- [SLAM] 02. Some basic algorithms of 3D reconstruction
链接:http://www.zhihu.com/question/29885222/answer/100043031 三维重建 3D reconstruction的一个算法思路介绍,帮助理解 首先一切 ...
- Camera Calibration and 3D Reconstruction
3D RECONSTRUCTION WITH OPENCV AND POINT CLOUD LIBRARY http://stackoverflow.com/questions/19205557/op ...
- Multi-View 3D Reconstruction with Geometry and Shading——Part-2
From PhDTheses Multi-View 3D Reconstruction with Geometry and Shading 我们的主要目标是只利用图像中的信息而没有额外的限制或假设来得 ...
- Multi-View 3D Reconstruction with Geometry and Shading——Part-1
From PhDTheses Multi-View 3D Reconstruction with Geometry and Shading 计算机视觉的主要任务就是利用图像信息能智能理解周围的世界. ...
- Real-time 3D Reconstruction using Kinect
http://jiakaizhang.com/project/real-time-3d-reconstruction/ Real-time 3D Reconstruction using Kinect ...
- 视觉SLAM的数学基础 第一篇 3D空间的位置表示
视觉SLAM中的数学基础 第一篇 3D空间的位置表示 前言 转眼间一个学期又将过去,距离我上次写<一起做RGBD SLAM>已经半年之久.<一起做>系列反响很不错,主要由于它为 ...
- 本人AI知识体系导航 - AI menu
Relevant Readable Links Name Interesting topic Comment Edwin Chen 非参贝叶斯 徐亦达老板 Dirichlet Process 学习 ...
- AI资源对接需求汇总:第3期
更好的阅读体验,请查看首发原文链接:AI资源对接需求汇总:第3期 平台介绍 平台由人工智能领域几个知名原创公众号发起,总读者约25万. 主要面向人工智能领域的从业者,涵盖图像处理.三维计算机视觉.机器 ...
- [SLAM] 01 "Simultaneous Localization and Mapping" basic knowledge
发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发信站: 水木社区 (Thu Jun 16 19:18:24 2016), 站内 ...
随机推荐
- iframe父子页面调用小结
子页面调用父页面 $('#Id', window.parent.document); //调用父页面元素 window.parent.func1(); //调用父页面方法 (子页面同理,需将js方 ...
- 使用AJAX填充<select>标签下拉项,没有显示指定的option项
newCarInfo.js代码如下: $(function() { // 获取燃油种类 url = "basicFuelType_queryAll.action"; ...
- android: UriMatcher的用法
ContentProvider是Android四大组件之一,网上也有不少关于它的文章,基本用法都可以查到,但关于UriMatcher在其中的作用,文章中都有例子,但我觉得还没有说清楚. 先说为什么用U ...
- 安卓App流量统计
http://keepcleargas.bitbucket.org/2013/10/12/android-App-Traffic.html 安卓App流量统计 12 OCT 2013 android流 ...
- Xamarin.Forms bug? System.ObjectDisposedException: Cannot access a disposed object
Hi, My Android Xamarin.Forms application uses a Navigation stack to display various views, I often h ...
- 使用Gulp和Browserify创建多个绑定文件
Browserify是一个Javascript的绑定工具,帮助我们理顺module之间的依赖关系.Gulp用来优化workflow.两者的共同点都是使用流,但在使用流方面也有不同之处: Browser ...
- gson 自定义对象转换格式
有时候我们希望gson按照我们想要的方式转换,比如将日期转换为时间戳 class GsonBuilderUtil { public static Gson create() { GsonBuilder ...
- Think in java 4th读书笔记__last update20151130
一周至少两章,去掉最后的并发和图形化用户界面,刚好需要2个半月才能学好.这进度感觉有点慢,所以做下调整吧,改成一个月会不会更好点^^,认认真真的把java的圣经给看一遍. 计划: 第1~6 11.17 ...
- 【Vegas原创】Mysql绿色版安装方法
所谓的绿色版,就是没有installer的MySQL,完全需要靠人工来操作,好处是,重装系统后,只要再做一次本次配置,即可使用. 具体操作方法: 1,设置系统环境变量, 在Path中添加 D:\mys ...
- javaweb 学习总结
http://www.cnblogs.com/xdp-gacl/category/574705.html 这个总结很好,以前看书没搞懂的,这里基本上都清楚了,赞一个,推荐. Servlet与普通Jav ...