Matlab解析LQR与MPC的关系
mathworks社区中的这个资料还是值得一说的。
1 openExample('mpc/mpccustomqp')
我们从几个角度来解析两者关系,简单的说就是MPC是带了约束的LQR.
在陈虹模型预测控制一书中P20中,提到在目标函数中求得极值的过过程中,相当于对输出量以及状态量相当于加的软约束
而模型预测控制与LQR中其中不同的一点,就是MPC中可以加入硬约束进行对状态量以及输出量的硬性约束
形如:S.T.表示的硬性约束,在LQR中没有这一项
下面我们从代码的角度解析这个问题:
1, 定义被控系统:
1 A = [1.1 2; 0 0.95];
2 B = [0; 0.0787];
3 C = [-1 1];
4 D = 0;
5 Ts = 1;
6 sys = ss(A,B,C,D,Ts);
7 x0 = [0.5;-0.5]; % initial states at [0.5 -0.5]
2,设计无约束LQR:

1 Qy = 1;
2 R = 0.01;
3 K_lqr = lqry(sys,Qy,R);
3, 运行仿真闭环结果:
1 t_unconstrained = 0:1:10;
2 u_unconstrained = zeros(size(t_unconstrained));
3 Unconstrained_LQR = tf([-1 1])*feedback(ss(A,B,eye(2),0,Ts),K_lqr);
4 lsim(Unconstrained_LQR,'-',u_unconstrained,t_unconstrained,x0);
5 hold on;
4,设计MPC控制器:
1 %%
2 % The MPC objective function is |J(k) = sum(x(k)'*Q*x(k) + u(k)'*R*u(k) +
3 % x(k+N)'*Q_bar*x(k+N))|. To ensure that the MPC objective function has the
4 % same quadratic cost as the infinite horizon quadratic cost used by LQR,
5 % terminal weight |Q_bar| is obtained by solving the following Lyapunov
6 % equation:
7 Q = C'*C;
8 Q_bar = dlyap((A-B*K_lqr)', Q+K_lqr'*R*K_lqr);
9
10 %%
11 % Convert the MPC problem into a standard QP problem, which has the
12 % objective function |J(k) = U(k)'*H*U(k) + 2*x(k)'*F'*U(k)|.
13 Q_hat = blkdiag(Q,Q,Q,Q_bar);
14 R_hat = blkdiag(R,R,R,R);
15 H = CONV'*Q_hat*CONV + R_hat;
16 F = CONV'*Q_hat*M;
17
18 %%
19 % When there are no constraints, the optimal predicted input sequence U(k)
20 % generated by MPC controller is |-K*x|, where |K = inv(H)*F|.
21 K = H\F;
22
23 %%
24 % In practice, only the first control move |u(k) = -K_mpc*x(k)| is applied
25 % to the plant (receding horizon control).
26 K_mpc = K(1,:);
27
28 %%
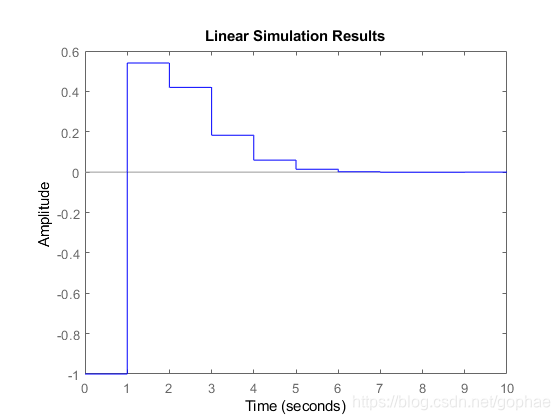
29 % Run a simulation with initial states at [0.5 -0.5]. The closed-loop
30 % response is stable.
31 Unconstrained_MPC = tf([-1 1])*feedback(ss(A,B,eye(2),0,Ts),K_mpc);
32 lsim(Unconstrained_MPC,'*',u_unconstrained,t_unconstrained,x0)
33 legend show
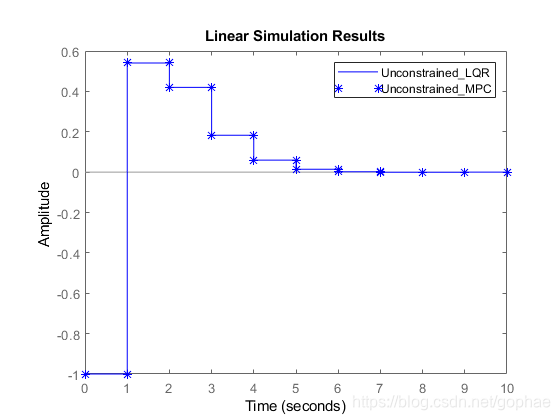
到这里,完全可以说明,在无约束前提下,两种方法是一致的:
1 K_lqr =
2
3 4.3608 18.7401
4
5
6 K_mpc =
7
8 4.3608 18.7401
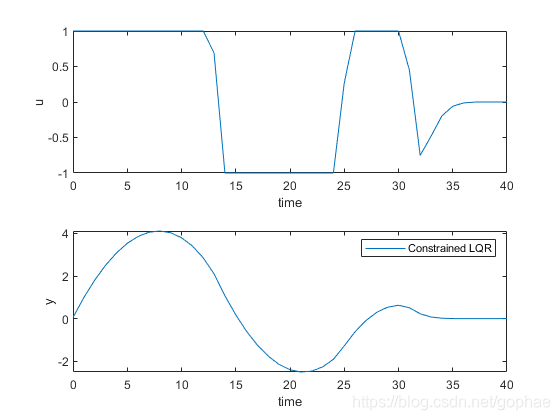
5,对LQR施加约束:
1 x = x0;
2 t_constrained = 0:40;
3 for ct = t_constrained
4 uLQR(ct+1) = -K_lqrx;
5 uLQR(ct+1) = max(-1,min(1,uLQR(ct+1)));
6 x = Ax+BuLQR(ct+1);
7 yLQR(ct+1) = Cx;
8 end
9 figure
10 subplot(2,1,1)
11 plot(t_constrained,uLQR)
12 xlabel(‘time’)
13 ylabel(‘u’)
14 subplot(2,1,2)
15 plot(t_constrained,yLQR)
16 xlabel(‘time’)
17 ylabel(‘y’)
18 legend(‘Constrained LQR’)
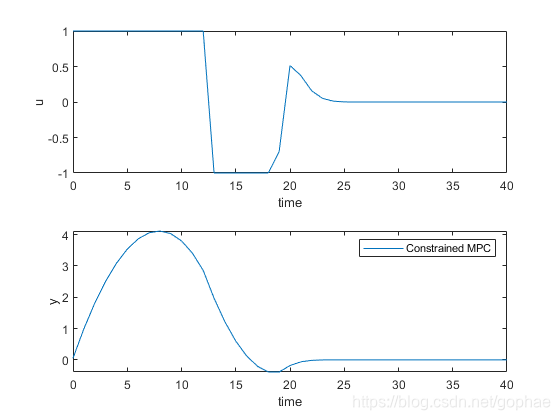
6,对MPC施加约束:
1 %% MPC Controller Solves QP Problem Online When Applying Constraints
2 % One of the major benefits of using MPC controller is that it handles
3 % input and output constraints explicitly by solving an optimization
4 % problem at each control interval.
5 %
6 % Use the built-in KWIK QP solver, |mpcqpsolver|, to implement the custom
7 % MPC controller designed above. The constraint matrices are defined as
8 % Ac*x>=b0.
9 Ac = -[1 0 0 0;...
10 -1 0 0 0;...
11 0 1 0 0;...
12 0 -1 0 0;...
13 0 0 1 0;...
14 0 0 -1 0;...
15 0 0 0 1;...
16 0 0 0 -1];
17 b0 = -[1;1;1;1;1;1;1;1];
18
19 %%
20 % The |mpcqpsolver| function requires the first input to be the inverse of
21 % the lower-triangular Cholesky decomposition of the Hessian matrix H.
22 L = chol(H,'lower');
23 Linv = L\eye(size(H,1));
24
25 %%
26 % Run a simulation by calling |mpcqpsolver| at each simulation step.
27 % Initially all the inequalities are inactive (cold start).
28 x = x0;
29 iA = false(size(b0));
30 opt = mpcqpsolverOptions;
31 opt.IntegrityChecks = false;
32 for ct = t_constrained
33 [u, status, iA] = mpcqpsolver(Linv,F*x,Ac,b0,[],zeros(0,1),iA,opt);
34 uMPC(ct+1) = u(1);
35 x = A*x+B*uMPC(ct+1);
36 yMPC(ct+1) = C*x;
37 end
38 figure
39 subplot(2,1,1)
40 plot(t_constrained,uMPC)
41 xlabel('time')
42 ylabel('u')
43 subplot(2,1,2)
44 plot(t_constrained,yMPC)
45 xlabel('time')
46 ylabel('y')
47 legend('Constrained MPC')
转载:https://blog.csdn.net/gophae/article/details/104546805/
Matlab解析LQR与MPC的关系的更多相关文章
- MATLAB模型预测控制(MPC,Model Predictive Control)
模型预测控制是一种基于模型的闭环优化控制策略. 预测控制算法的三要素:内部(预测)模型.参考轨迹.控制算法.现在一般则更清楚地表述为内部(预测)模型.滚动优化.反馈控制. 大量的预测控制权威性文献都无 ...
- Autofac官方文档翻译--二、解析服务--2隐式关系类型
Autofac 隐式关系类型 Autofac 支持自动解析特定类型,隐式支持组件与服务间的特殊关系.要充分利用这些关系,只需正常注册你的组件,但是在使用服务的组件或调用Resolve()进行类型解析时 ...
- MATLAB解析PFM格式图像
http://www.p-chao.com/ja/2016-09-27/matlab%E8%A7%A3%E6%9E%90pfm%E6%A0%BC%E5%BC%8F%E5%9B%BE%E5%83%8F/ ...
- wordpress源码解析-目录结构-文件调用关系(1)
学习开源代码,是一种很快的提升自己的学习方法.Wordpress作为一个开源的博客系统,非常优秀,应用广泛,使用起来简单方便,具有丰富的主题和插件,可以按照自己的需求来任意的进行修改.所以就从word ...
- 黄聪:wordpress源码解析-目录结构-文件调用关系(转)
Wordpress是一个单入口的文件,所有的前端处理都必须经过index.php,这是通过修改web服务器的rewrite规则来实现的.这种做法的好处是显而易见的,这样URL更好看,不必为每一个url ...
- Apollo代码学习(七)—MPC与LQR比较
前言 Apollo中用到了PID.MPC和LQR三种控制器,其中,MPC和LQR控制器在状态方程的形式.状态变量的形式.目标函数的形式等有诸多相似之处,因此结合自己目前了解到的信息,将两者进行一定的比 ...
- 开发者说 | Apollo控制算法之汽车动力学模型和LQR控制
参考:https://mp.weixin.qq.com/s?__biz=MzI1NjkxOTMyNQ==&mid=2247486444&idx=1&sn=6538bf1fa74 ...
- 以神经网络使用为例的Matlab和Android混合编程
由于需要在一个Android项目中使用神经网络,而经过测试发现几个Github上开源项目的训练效果就是不如Matlab的工具箱好,所以就想在Android上使用Matlab神经网络代码(可是...) ...
- Matlab与数学建模
一.学习目标. (1)了解Matlab与数学建模竞赛的关系. (2)掌握Matlab数学建模的第一个小实例—评估股票价值与风险. (3)掌握Matlab数学建模的回归算法. 二.实例演练. 1.谈谈你 ...
随机推荐
- 哈工大 计算机系统 实验七 TinyShell
所有实验文件可见github 计算机系统实验整理 实验报告 实 验(七) 题 目 TinyShell 微壳 计算机科学与技术学院 目 录 第1章 实验基本信息 - 4 - 1.1 实验目的 - 4 - ...
- Qt:QString
0.说明 区别于QByteArray,QString串是Unicode串,每个元素都是QChar 16-bit UTF-16编码(Unicode) :而QByteArray是8-bit串. 0.1.初 ...
- VSCode 安装Vue 插件 - vetur
想要编辑器识别vue文件需要安装vue插件,在VSCode上好用的是vetur 如下图:(如果没有安装就会出现安装按钮,点击进行安装) 安装完成之后,重启VSCode,就能识别vue文件了,方便我们编 ...
- 小白上手Linux系统安装jdk教程
1.查看是否有预装jdk及jdk版本: rpm -qa|grep jdk 如果有则卸载安装:rpm -e --nodeps jdk-1.7.0_79-fcs.x86_64 2.先将linux版的jdk ...
- LeetCode-022-括号生成
括号生成 题目描述:数字 n 代表生成括号的对数,请你设计一个函数,用于能够生成所有可能的并且 有效的 括号组合. 示例说明请见LeetCode官网. 来源:力扣(LeetCode) 链接:https ...
- HTML的怎么使用,开发工具以及常用标签。
前端学习:学习地址:黑马程序员pink老师前端入门教程,零基础必看的h5(html5)+css3+移动,下面这些都是一些学习笔记.临渊羡鱼,不如退而结网!!愿我自己学有所成,也愿每个前端爱好者学有所成 ...
- 使用 Istio CNI 支持强安全 TKE Stack 集群的服务网格流量捕获
作者 陈计节,企业应用云原生架构师,在腾讯企业 IT 负责云原生应用治理产品的设计与研发工作,主要研究利用容器集群和服务网格等云原生实践模式降低微服务开发与治理门槛并提升运营效率. 摘要 给需要快速解 ...
- Vue基础语法-数据绑定、事件处理和扩展组件等知识详解(案例分析,简单易懂,附源码)
前言: 本篇文章主要讲解了Vue实例对象的创建.常用内置指令的使用.自定义组件的创建.生命周期(钩子函数)等.以及个人的心得体会,汇集成本篇文章,作为自己对Vue基础知识入门级的总结与笔记. 其中介绍 ...
- larav jq ajax 登录
//自高自测登录8.10 Route::get('name/login','nameLoginController@login'); Route::post('/name/logins','nameL ...
- laravel8安装步骤
网址: https://learnku.com/docs/laravel/8.x/installation/9354 安装: # 安装laravel composer create-project - ...