Gaia2 与 ARE:赋能社区的智能体评测
在理想情况下,AI 智能体应当是可靠的助手。当接收到任务时,它们能够轻松处理指令中的歧义,构建逐步执行的计划,正确识别所需资源,按计划执行而不被干扰,并在突发事件中灵活适应,同时保持准确性,避免幻觉。
然而,开发智能体并测试这些行为并非易事:如果你曾尝试过调试自己的智能体,可能会体会到其中的繁琐和挫败感。现有的评测环境通常与特定任务紧密耦合,缺乏真实世界的灵活性,也无法反映开放世界中混乱的现实:模拟页面不会加载失败,事件不会自发发生,也不存在异步混乱。
因此,我们很高兴地介绍 Gaia2 ——智能体基准 GAIA 的后续版本,它能够分析更复杂的行为。Gaia2 与开放的 Meta Agents Research Environments (ARE) 框架一同发布,用于运行、调试和评测智能体。ARE 可以模拟复杂、接近真实世界的条件,并支持定制化,以便进一步研究智能体行为。Gaia2 数据集以 CC BY 4.0 许可证发布,ARE 框架则以 MIT 许可证开源。

图 1:Gaia2 的预算扩展曲线(Budget Scaling Curves)。随着预算增加,智能体在任务上的表现逐渐提升,用于展示在复杂环境中智能体能力随资源投入的变化趋势。
Gaia2:真实场景助理任务上的智能体评测
GAIA 是 2023 年发布的一个智能体基准测试,包含三类信息检索问题,需要工具调用、网页浏览和推理能力才能完成。两年过去,如今最简单的题目对模型来说已经过于容易,而社区也逐渐接近攻克最难的部分问题,因此,是时候推出一个全新且更具挑战性的智能体基准了!
这就是 Gaia2 —— GAIA 的全新升级版本,在能力覆盖与研究深度上都有大幅拓展!
相比于只读的 GAIA,Gaia2 升级为可读写的评测基准,更加关注交互行为与复杂性管理。
在 Gaia2 中,智能体不仅要完成搜索与检索任务,还需要在充满不确定性和时间敏感性的指令下执行操作,并在包含可控故障的嘈杂环境中运行——这一设定比以往任何模拟环境都更接近真实世界。
我们希望测试智能体在以下场景下的表现:
- 当工具或 API 偶尔失效时如何应对;
- 如何在严格的时间窗口中规划一系列动作;
- 如何快速适应突发事件。
这意味着智能体将面临全新的复杂性挑战!
为此,我们设计了以下任务组(基于全新创作的 1000 个人工场景):
- 执行能力(Execution):多步骤指令执行与工具使用(如更新联系人信息)
- 搜索能力(Search):跨来源信息收集(如从 WhatsApp 获取朋友所在城市)
- 歧义处理(Ambiguity Handling):澄清冲突请求(如解决日程冲突)
- 适应性(Adaptability):应对模拟环境中的变化(如根据后续信息修改邮件)
- 时间/时序推理(Time/Temporal Reasoning):处理时间敏感任务(如延迟 3 分钟后再叫车)
- 智能体间协作(Agent-to-Agent Collaboration):在无直接 API 访问的情况下进行智能体间通信
- 噪声容忍度(Noise Tolerance):在 API 故障和环境不稳定条件下保持稳健
延续 GAIA 的设计理念,这些场景不依赖专业知识 理论上人类可以轻松达到 100% 完成度,从而方便模型开发者进行调试和改进。
想要深入体验这个基准吗?欢迎查看我们的 数据集,
你也可以通过我们的 在线演示 更直观地探索与展示。
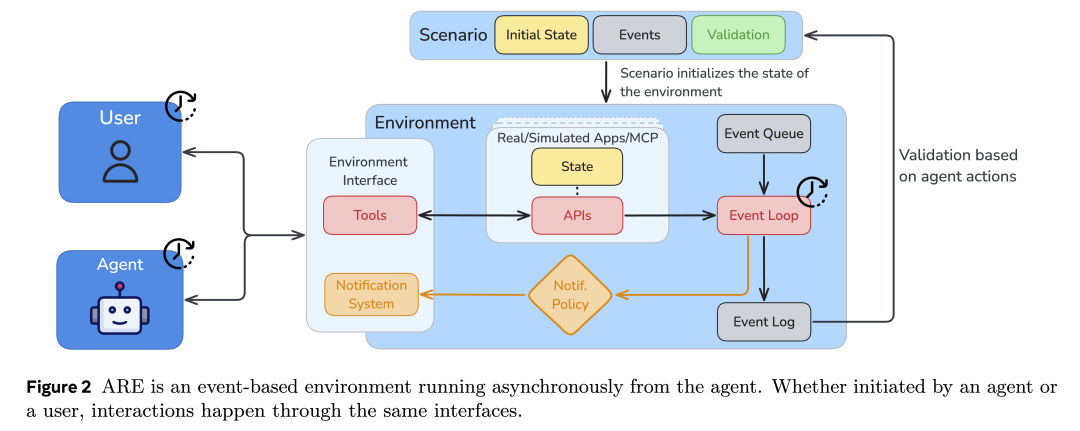
Gaia2 如何运行?
Gaia2 运行在 ARE(Agent Research Environments)执行环境中,在这里,用户可以选择任意智能体,并赋予其对一系列应用程序及预置数据的访问能力。
针对 Gaia2,我们打造了一个 智能手机模拟环境,再现人类日常生活中的使用场景。环境中包含真实世界常见的应用,如消息类(电子邮件)、工具类(日历、联系人、购物、文件系统等),以及一个与智能体对话的聊天界面。所有应用也都可以通过工具调用的方式被智能体访问。更有趣的是,演示环境还附带了一个虚拟用户的历史对话与应用交互记录。
在运行过程中,所有智能体的交互都会被自动记录为 结构化轨迹(structured traces),以便深入分析。这些轨迹包括:工具调用、API 响应、模型思考过程、时间指标(如响应延迟)、用户交互等,并可导出为 JSON 文件。
结果展示
作为参考,我们对比了多款开源与闭源的大模型,包括:Llama 3.3-70B Instruct、Llama-4-Maverick、GPT-4o、Qwen3-235B-MoE、Grok-4、Kimi K2、Gemini 2.5 Pro、Claude 4 Sonnet,以及 GPT-5 在不同推理模式下的表现。
所有模型均在相同配置下进行评测:采用统一的 ReAct 循环确保一致性,温度设定为 0.5,最大生成上限为 16K tokens。根据具体任务类型,评测方式结合了“模型判别(以 Llama 3.3 Instruct 70B 作为评审)”和“严格匹配(exact-match)”两种方法。同时,系统提示中预置了全部 101 个工具及通用环境描述。

在评测的模型中,截至 2025 年 9 月,整体得分最高的模型是具备强大推理能力的 GPT-5,而表现最好的开源模型则是 Kimi K2。
从能力维度来看,一些任务已经被顶级模型基本解决:例如简单工具调用与指令执行(execution),以及整体的检索能力(search)(这一点从 GAIA 的结果中已经有所预期)。然而,歧义处理(ambiguity)、适应性(adaptability)和抗噪性(noise)依旧是所有模型的普遍挑战。值得注意的是,那些过去被认为复杂的智能体任务(如指令执行与信息检索),并不能很好预测模型在更贴近真实世界任务上的表现。最后,目前所有模型在 time 维度上的表现最为薄弱:在处理时间敏感型操作上仍然非常困难(不过,未来通过专用工具与更好的时间推理机制可能有所改善)。详细分析可见论文正文。
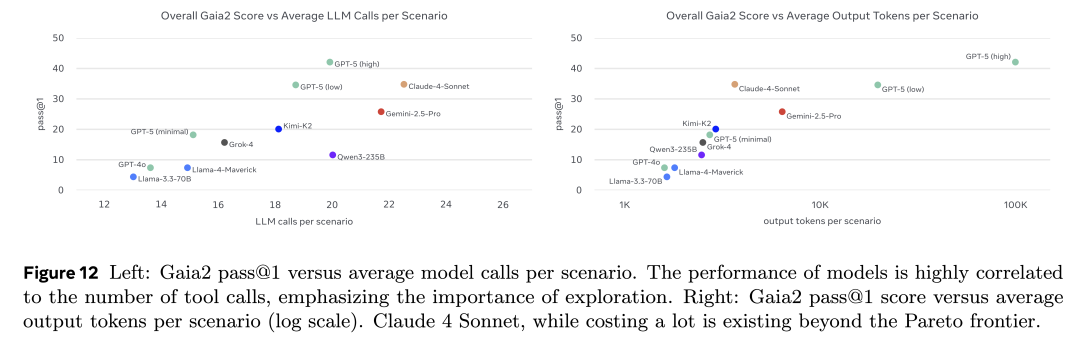
同时,我们认为必须超越单纯的分数汇报:如果一个模型虽然答对了,但需要消耗数千个 token 或运行数小时才能得出结果,那么它的表现显然“不如”另一款在更短时间、更低成本下完成任务的模型。
因此,我们对得分进行了成本归一化:通过平均 LLM 调用次数与输出 token 数量来量化,并绘制出性能—成本的帕累托前沿(Pareto frontier)。在论文中,你将看到模型得分与实际金钱成本及耗时的对比结果。
与您喜爱的模型对比!在 Gaia2 上进行评测
如果你想在 Gaia2 上评测自己的模型,可以按照以下步骤操作:
首先,在你选择的 Python 环境(uv、conda、virtualenv 等)中安装 Meta 的 Agent Research Environment:
pip install meta-agents-research-environments
然后,运行基准测试,覆盖所有配置:执行(execution)、检索(search)、适应性(adaptability)、时间(time)以及歧义(ambiguity)。
别忘了使用 hf_upload 参数将结果上传到 Hugging Face Hub!
运行基准测试的示例命令如下:
are-benchmark run --hf meta-agents-research-environments/Gaia2 --split validation --config CONFIGURATION --model YOUR_MODEL --model_provider YOUR_PROVIDER --agent default --max_concurrent_scenarios 2 --scenario_timeout 300 --output_dir ./monitored_test_results --hf_upload YOUR_HUB_DATASET_TO_SAVE_RESULTS
运行 oracle 来生成汇总得分文件。
are-benchmark judge --hf meta-agents-research-environments/Gaia2 --split validation --config CONFIGURATION --agent default --max_concurrent_scenarios 2 --scenario_timeout 300 --output_dir ./monitored_test_results --hf_upload YOUR_HUB_DATASET_TO_SAVE_RESULTS
最后,请在 README 中补充与你的模型相关的所有信息,并将结果分享到排行榜,以便在 这里 集中展示 Gaia2 的运行轨迹!
超越 Gaia2:用 ARE 深入研究你的智能体
除了基准场景外,你还可以在 ARE 中使用 Gaia2 的应用和内容,测试模型是否能够正确完成一些更难验证的任务,例如加载邮件、撰写跟进回复、在日历中添加事件或预约会议。总之,ARE 提供了一个通过交互来评估 AI 助手的理想环境!
你也可以轻松定制环境:
- 连接你的工具(通过 MCP 或直接接入),在其上测试智能体;
- 实现自定义场景,包括设置 触发事件或定时事件(例如:2 分钟后,邮件应用收到来自联系人的新邮件),从而观察智能体如何适应动态变化的环境。
(默认情况下,智能体运行在 json agent 模式下,不会对你的本地机器造成影响;除非你将它们连接到具备不安全权限的外部应用。因此,在添加自定义应用或使用不可信的 MCP 时,请务必保持谨慎。)
以下是我们使用 ARE 的一些典型场景:
- 快速评估任意智能体:基于真实或模拟数据,测试不同规则、工具、内容和验证方式下的表现
- 测试智能体的 工具调用与编排能力:可结合本地应用或 MCP 工具
- 生成自定义的工具调用轨迹,用于 微调具备工具调用能力的模型
- 在统一框架下,轻松收集并 复现现有的智能体基准测试
- 在用户界面中,实时调试并 研究智能体之间的交互
- 在嘈杂环境中(如 API 超时、任务歧义),研究模型的局限性
我们录制了 3 段视频,展示了其中的一些使用场景(当然,我们也希望社区能在 ARE 上发挥更多创造力 :hugging_face:)。
这些视频基于前文提到的默认演示环境,内容模拟了一位名为 Linda Renne 的机器学习博士生的日常生活。
1) 测试智能体在简单任务中的表现:活动组织
为了测试默认模型在活动组织上的能力,我们来策划一场生日派对!
首先,我们让智能体给 Renne 家族的成员群发短信,告知用户的 30 岁生日派对将在 11 月 7 日举行。默认的模拟环境中共有 21 个联系人,其中 5 位属于 Renne 家族 —— 包括模拟“主人”Linda、她的父母 George 和 Stephie、妹妹 Anna,以及祖父 Morgan。智能体成功遍历了联系人列表,找到了这四位家族成员,并向他们发出了通知。
接下来,我们要求智能体创建一个日历邀请,并将他们添加为受邀者。智能体成功记住了之前的上下文:它在正确的日期创建了日历事件,并把家族成员正确添加进来。
2) 理解智能体:深入分析轨迹
ARE 还支持我们查看智能体在执行任务时的完整轨迹。
打开左侧的 Agent logs 工具后,可以看到系统提示、思维链(chain of thought)、通过工具执行的多步操作,以及最终结果——所有内容都被清晰地组织成日志形式。
如果需要离线分析,还可以将所有信息导出为 JSON 文件。

3) 玩转并扩展演示:将智能体连接到你自己的 MCP
在最后一个示例中,我们通过 MCP 将 ARE 连接到一只远程机械臂,让它可以做出手势。随后,我们要求智能体通过挥动机械臂来回答我们的是/否问题!以下是演示效果:

但以上这些示例只是非常简单的起点,我们真正期待的是——看看你们能用它们创造出什么!
(对于更高阶的用户,你甚至可以直接安装并编辑 Meta-ARE 的代码,点此查看。)
总结
Gaia2 与 ARE 是全新的研究工具,我们希望它们能够帮助更多人轻松构建更可靠、更具适应性的 AI 智能体。通过简化实验过程,让真实世界的评测对所有人都更易获得,并通过透明、可复现的基准与可调试的轨迹来增强信任。
我们非常期待看到大家能用这个项目做出什么!
Gaia2 与 ARE:赋能社区的智能体评测的更多相关文章
- 【SerpentAI:Python开源游戏智能体开发框架——相比OpenAI Universe可导入自己的游戏、可脱离Docker/VNC运行】
https://weibo.com/fly51fly?from=myfollow_all&is_all=1#1514439335614 [SerpentAI:Python开源游戏智能体开发框架 ...
- TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- 伯克利推出「看视频学动作」的AI智能体
伯克利曾经提出 DeepMimic框架,让智能体模仿参考动作片段来学习高难度技能.但这些参考片段都是经过动作捕捉合成的高度结构化数据,数据本身的获取需要很高的成本.而近日,他们又更进一步,提出了可以直 ...
- DRL 教程 | 如何保持运动小车上的旗杆屹立不倒?TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- STM32W108无线传感器网络节点自组织与移动智能体导航技术
使用STM32W108无线开发板及节点完毕大规模网络的自组建,网络模型选择树型,网络组建完毕之后,使用基于接收信号强度指示RSSI(ReceivedSignal Strength Indication ...
- 多智能体系统(MAS)简介
1.背景 自然界中大量个体聚集时往往能够形成协调.有序,甚至令人感到震撼的运动场景,比如天空中集体翱翔的庞大的鸟群.海洋中成群游动的鱼群,陆地上合作捕猎的狼群.这些群体现象所表现出的分布.协调.自 ...
- 基于ROBO-MAS多智能体自主协同 高频投影定位系统
- 基于E-PUCK 2.0多智能体自主协同 高频投影定位系统
群体智能机器人是一种国际前沿的人工智能研究项目,由多个小型机器人组成的集群式解决系统,灵感源于蚂蚁.蜜蜂.鱼等群体生物,在没有统一领导的情况下,也能合作执行大量复杂的任务,比如组建一个图形,再在此基础 ...
- 多智能体仿真环境 NetLogo
http://ccl.northwestern.edu/netlogo/ 创建agentcreate-turtles 10 动一动ask turtle 0 [forward 10 right 90 l ...
- 强化学习——如何提升样本效率 ( DeepMind 综述深度强化学习:智能体和人类相似度竟然如此高!)
强化学习 如何提升样本效率 参考文章: https://news.html5.qq.com/article?ch=901201&tabId=0&tagId=0&docI ...
随机推荐
- bfs 和 dfs + 回溯 的比较好的写法
简介 刷题经常会使用bfs 和 dfs 总结 问题, 从0,0 走到 n,m 最小花费是多少? 0, 花费2元 1, 花费1元 2, 此路不通 code dfs void dfs(vector< ...
- 安装 mathtype
简介 有些会议一定要用mathtype对公式进行编辑,其实我觉得office提供的公式编辑挺好的 参考链接 https://www.bilibili.com/video/BV14i4y1V7gt?p= ...
- java combobox 多选框
简介 简单 code package calcu; import java.awt.*; import javax.swing.*; public class ComboBoxFrame extend ...
- 谷云科技RestCloud完成数千万人民币Pre-A轮融资
聚焦企业系统集成及数据融合场景的谷云科技RestCloud iPaaS于近期完成数千万人民币Pre-A轮融资,本轮融资由SIG 海纳亚洲创投基金独家投资. 谷云科技RestCloud是一家专注于大型企 ...
- 通过ETLCloud CDC构建高效数据管道解决方案
随着企业数据规模的快速增长和多样化的数据,如何高效地捕获.同步和处理数据成为了业务发展的关键.本文将介绍如何利用ETLCloud CDC技术,构建一套高效的CDC数据管道,实现实时数据同步和分析,助力 ...
- SciTech-Mathmatics-Statistics-Descriptive Statistics-"Pandas + NumPy" + "Best Ways to Grayscale/"Color Channels Split" Images with Python Using OpenCV+Pandas+NumPy
问题:怎么解释 答案:percentile函数是统计学用于计算数据集的特定百分位数. percentile百分位数 与 percentile()函数 # 示原理代码 img = cv.imread(' ...
- Leetcode1681-模拟,位运算
题目链接:https://leetcode.cn/problems/count-the-number-of-consistent-strings/description/ 32位int构造出现过的字符 ...
- MySQL视图、触发器
一.视图 1.什么是视图? SQL语句的执行结果是一张虚拟表 我们可以基于该表做其他操作 如果这张虚拟表需要频繁使用 那么为了方便可以将虚拟表保存起来 保存起来之后就称之为"视图" ...
- .net framework 4.7.2 框架winform项目升级到.net 8.0项目 log4net不起作用的解决办法
问题描述: 在.net framework 4.7.2 框架中的winform项目,引入log4net作为日志组件使用,一切正常,可以正常输出日志. 但项目框架升级到.net 8.0后,log4net ...
- 基于stm32单片机家庭环境监测系统
1.演示视频 基于stm32单片机家庭环境监测系统视频演示_哔哩哔哩_bilibili 2. 项目介绍 本项目基于STM32F103C8T6最小系统板,打造了一个功能强大.显示直观的家庭环境监测系统. ...