手撕深度学习之CUDA并行规约算法(下篇):硬核优化5连击,性能暴涨300%!附开箱即用模板,小白也能秒上手!
本文首发于本人微信公众号,链接:
https://mp.weixin.qq.com/s/XSXjwPZBwZCE1uy8gRZqWg
摘要
本文为CUDA并行规约系列文章的下篇,本文介绍了5种并行规约算法的实现,并从硬件的角度对它们进行分析和优化,最终给出一个开箱即用的模板代码及其使用示例。
勘误
首先是一个勘误,在上篇中存在一个拼写错误,线程束的正确单词是Warp而不是Wrap,非常抱歉给读者朋友们造成了误解。
写在前面
这是本系列文章的下篇。上篇介绍了一些CUDA并行规约优化涉及到的GPU硬件知识,并给出了两种并不完美的实现。
本文将接着介绍剩下的五种实现,并给出一个开箱即用的CUDA并行规约模板。
算法具体实现(下篇)
V2: Sequential Addressing
先简单回顾一下,在上篇的最后,我们发现V1版本的实现存在Bank Conflict的问题,具体表现为,当\(s=32\)时,\(T_0\)会访问\(A_0\),\(T_1\)会访问\(A_{32}\),\(T_2\)会访问\(A_{64}\).....,造成一个Warp里所有线程都同时访问Bank 0,导致这些访问被串行化,严重影响性能。
造成这一问题的根本原因是:同一个Warp里的线程,它们访问的地址存在可变的Stride
Bank机制设计之初的预期就是一个Warp里32个线程访问连续的32个地址,而不是访问分散在各处的地址。
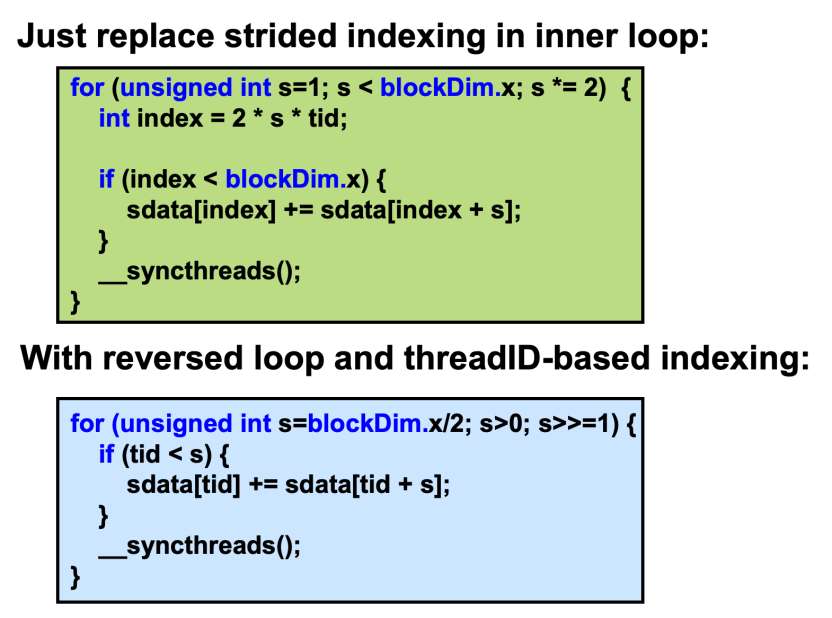
明确了这一点之后,优化方法就很明确了:我们只需要让每个线程都负责其threadIdx对应的内存地址的规约即可,比如\(T_0\)就只管\(A_0\),\(T_1\)就只管\(A_1\),这样就不会出现Bank Conflict了。
由于要防止Warp Divergence,所以第一轮循环只有前一半线程在工作,以\(n=512\)为例,第一轮循环只有\(T_0\)到\(T_{255}\)在工作,那么很显然的,\(T_0\)就需要规约\(A_0\)和\(A_{256}\),\(T_1\)需要规约\(A_1\)和\(A_{257}\),以此类推。这个过程如下图所示:
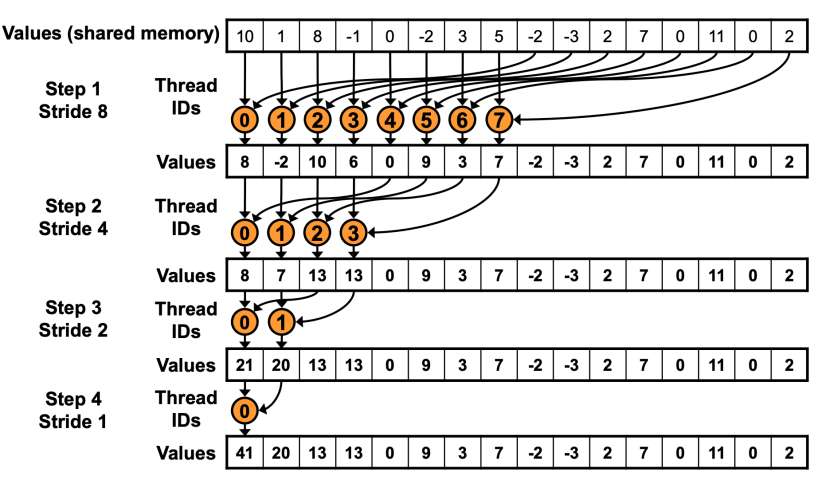
在代码实现上也不难,只需要做如下改变即可:
一个容易混淆的点
可能会有读者感到疑惑:总会有一次循环,\(T_0\)会访问\(A_0\)和\(A_{32}\),这怎么能算解决了Bank Conflict呢?
这里需要明确的一点是:Bank Conflict是发生在线程间的,而不是一个线程内的指令间的。
从指令执行的角度来分析,就以\(A_0 = A_0 + A_{32}\)为例,这条语句会分4步完成,分别是:读取\(A_0\),读取\(A_{32}\),计算\(A_0 + A_{32}\),写入\(A_0\)。
对\(T_0\)而言,读取\(A_0\)和读取\(A_{32}\)一定是先后发生的,不会并行,所以也就不存在Bank Conflict。
这里我们再从线程间执行的角度来看看,在\(T_0\)读取\(A_0\)时,\(T_1\)在读取\(A_1\),这不会发生冲突。但是如果是V1的实现,在\(T_0\)读取\(A_0\)时,\(T_1\)可能会同时在读取\(A_{32}\),这就导致了Bank Conflict。
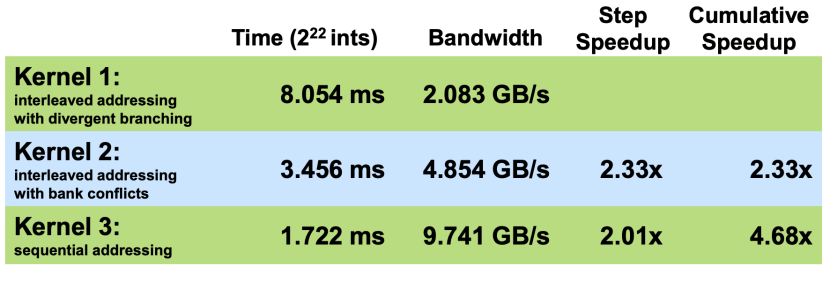
优化效果
根据NVIDIA的数据,这一优化将性能提升了接近1倍,也是相当可观的。
V3: First Add During Load
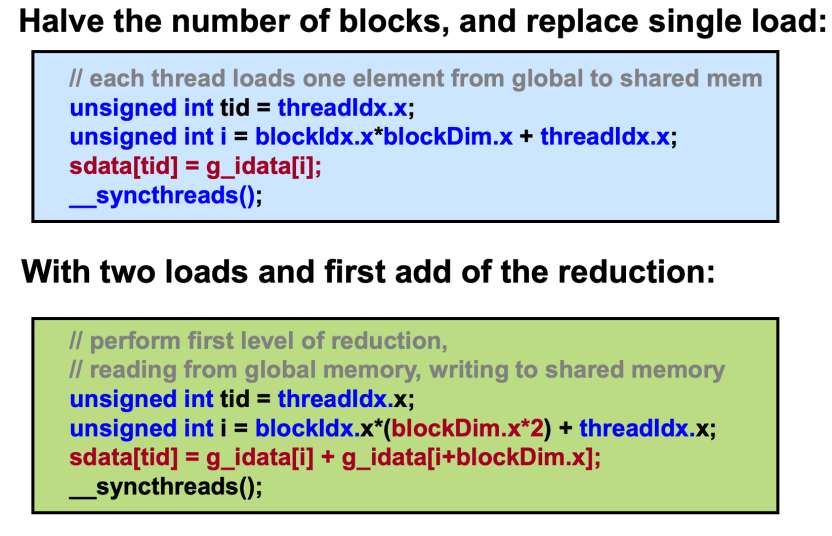
V2版本已经把硬件上踩过的坑基本都填完了,接下来就是一些细节上的优化。其中有一个思路就是在把数据加载到共享内存的阶段做一些预处理。
比如,我们可以先把\(A_0\)和\(A_1\)规约了,然后存储到\(A_0\)中,把\(A_2\)和\(A_3\)规约了,存储到\(A_1\)中。这样就只需要启动一半的线程,以几乎一半的时间执行完所有的任务。
这一想法还可以进一步推广,如果在加载阶段就提前规约4个元素,那就可以把时间压缩到\(\frac{1}{4}\)。
这一思想就是所谓的算法级联,即结合并行执行和串行执行的策略。这部分更详细的会在后面V6版本里分析。
由于这里NVIDIA的实现和我们的问题定义有冲突,这里就不详细展开了,仅贴出NVIDIA的实现供参考。
实测的数据也验证了这一理论的正确性,时间确实缩短了接近一半。

V4: Unroll the Last Warp
V3版本计算出的有效带宽为17GB/s,远没有达到硬件的上限,所以有理由怀疑这里还存在指令执行上的瓶颈。
观察之后发现,这里的部分循环指令也许可以优化掉。在上篇中,我们提到过:在同一个Warp里,指令执行可以认为是同步的,所以我们可以在最后32个线程工作时去掉__syncthreads。
此外,既然都已经知道这里是最后32个线程在工作了,那循环也不必需要了,可以直接硬编码写\(T_i = A_i + A_{i+32}\),\(T_i = A_i + A_{i+16}\),......,最终的修改如下图所示
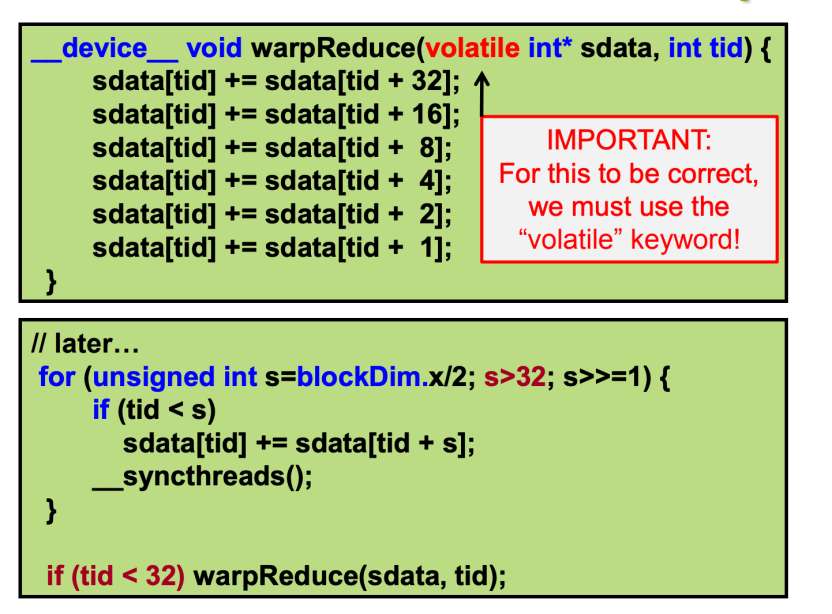
为什么不需要线程同步了?
因为这里可以保证进入warpReduce的线程是\(T_0\)到\(T_{31}\),即一个Warp内的线程。
根据之前的内容,\(T_0\)在执行函数第二行\(A_0 += A_{16}\)时,\(T_{16}\)是一定也在执行第二行,换言之,\(T_{16}\)是一定执行完成了第一行的,这就保证了在执行取\(A_{16}\)这个指令时,\(A_{16}\)存储的一定是规约了\(A_{16}\)和\(A_{48}\)之后的值。
那么还有一个疑问:这里\(T_{16}\)写入了新的\(A_{16}\)的值是\(A_{16} + A_{32}\),这不就破坏了整个规约过程了吗?
事实上,这里\(T_{16}\)写入了什么并不重要,这是基于两点事实:
首先,\(T_{16}\)写入\(A_{16}\)和\(T_0\)写入\(A_0\)一定是在同一个时钟周期内发生的,所以在一开始执行第二行时,\(T_0\)读取到的\(A_{16}\)一定是没被破坏的\(A_{16}\),这确保了\(T_0\)执行的正确性;
其次,在执行完第一行之后,实际上只有\(T_0\)到\(T_{15}\)真正起作用了,后面16个线程只要不乱写数据妨碍到前16个线程的工作,无论做什么都对结果没影响。
所以理论上讲,这里加个判断,只让\(tid < 16\)的线程执行,最终的结果都是正确的。这里没有这么做主要是为了防止Warp Divergence。
优化效果
实验数据表明,仅仅是对最后一个Warp做了循环展开,最终性能就优化了接近一倍。

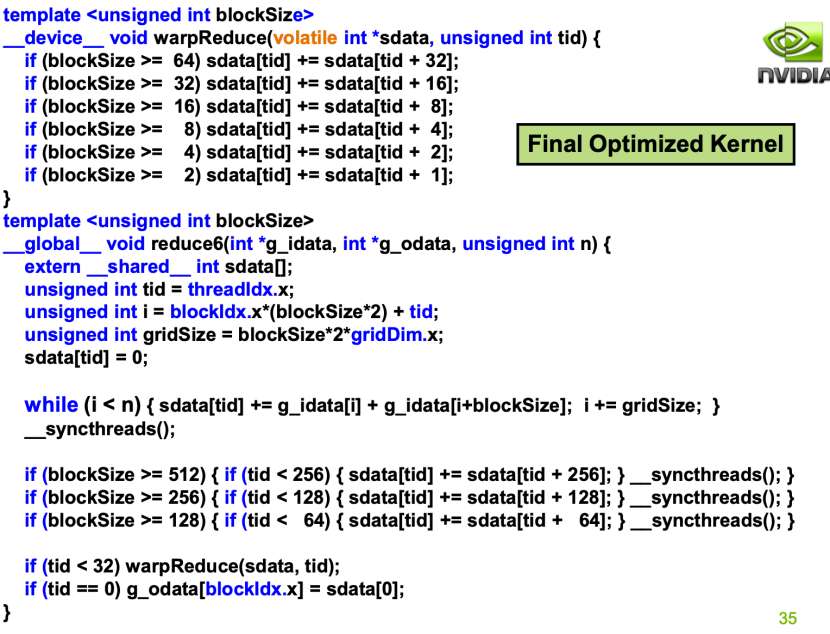
V5: Completely Unrolled
既然只对最后一个Warp进行循环展开优化就这么明显,那能不能再激进一些,把所有循环都丢掉呢?
答案是Yes。
因为一个线程块内的线程数量上限是1024,并且我们要求线程数量是2的整数次幂,所以我们可以枚举所有可能的线程数量,然后仿照之前展开最后一个循环的方法,针对每种情况直接写出对应的展开后的代码。
如果只是在参数列表里加一个blockSize,那么在运行时还是会经过多个无意义的if-else,影响执行效率。这里可以借助C++的模板机制,进一步地提升执行性能。具体的修改如下图所示:
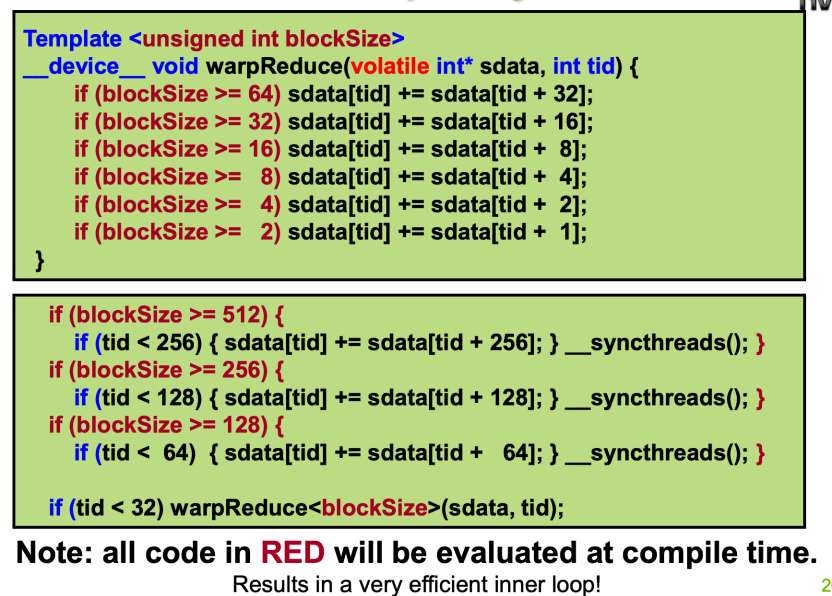
这里的blockSize是在调用时使用模板传递的,这里面的if会在编译时就进行优化。
编译器会使用Dead Code Elimination,根据blockSize删掉不可达的代码,所以最终编译出的二进制里面是不会有这些红色的if的,只有一串顺序执行的指令。
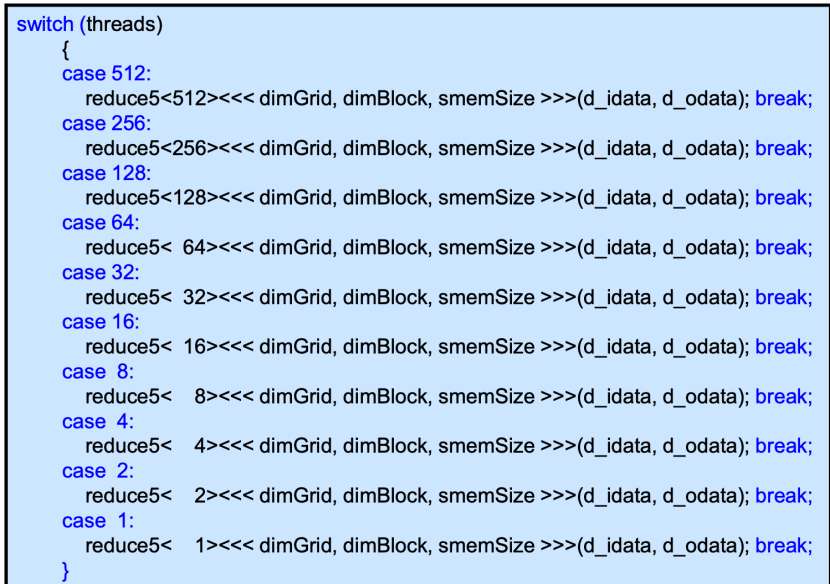
但是模板要求我们在编译阶段就确定blockSize,在实际实现时是比较困难的,这个该如何解决呢?答案是在调用时使用switch来枚举,简单粗暴,如下图所示:
优化效果

V6: Multiple Adds
理论分析
这里我们要从成本的角度来看待一下现有的方案。
和我们租用算力服务器一样,成本可以用使用时间 * GPU核心数量来衡量,这里GPU核心数量可以认为是线程数量,两者之间只有常数倍的差别。
我们假设这样一个场景来计算成本:
- 只有1个Batch,共有\(N\)个元素
- 启动\(P\)个线程来处理,在V5实现中,\(P=N\)
这里使用Brent定理:
\]
其中\(t(n)\)为算法的估计实际执行时间;\(W(n)\)表示算法的总工作量,即一共执行多少次运算;\(p\)表示线程数量;\(T(n)\)表示算法在最理想的情况下,算法执行的最短用时
很显然,这里\(p=N\);由于最少也需要执行\(\log N\)步规约,所以\(T(n)=\log N\);一通计算可以得到,\(W(n)=O(N)\),这里具体计算过程见NVIDIA的PPT,这里不再赘述。
带入公式可得,\(t(n)=O(\log N)\)
那么可以计算得到,V5版本算法的成本为\(O(N \log N)\)。
但是如果用一个线程串行处理所有数据,成本却只有\(O(N)\),也就是说,我们的并行算法的成本比纯串行处理还要高。那么怎么把这个成本降下来呢?
这里成本变高的本质是:线程数量过多,使得每个线程的工作量太少,导致了整体成本的增大。
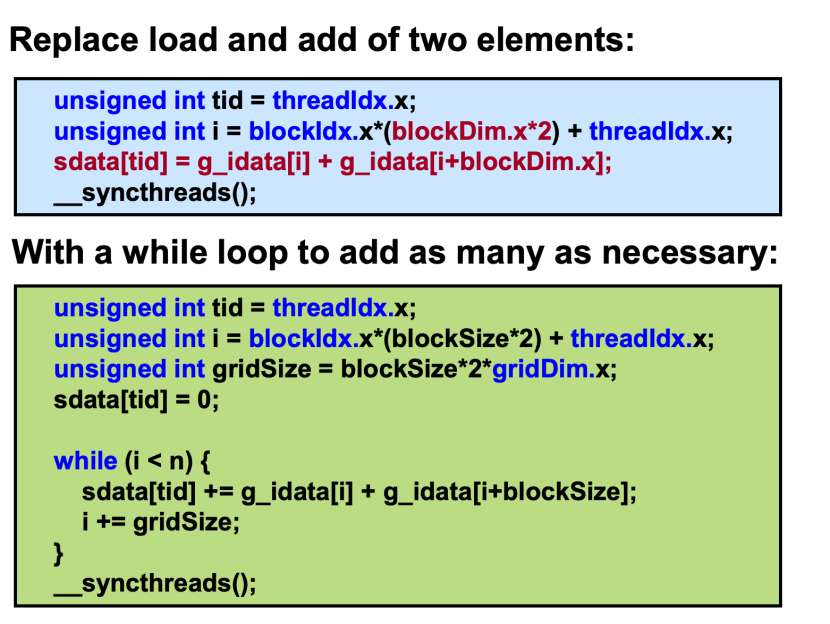
那么相对应的,我们可以通过减少线程数量来实现降本增效。具体来说,我们可以使用V3中提到的方法,即在加载数据的阶段就提前做几次规约。
那么具体应该做多少次呢?这里NVIDIA的PPT里给出的数据是应该做\(\log N\)次,如此优化之后,最终的成本能降到\(O(N)\),可以和串行执行持平。
这里把串行和并行搭配使用的策略就是算法级联。
实现方式
这里NVIDIA的实现和我们的问题定义相冲突,所以这里不再赘述了,后面在开箱即用的部分会解释我们是如何处理这一冲突的。
下图是V5到V6版本的变化以及V6的完整代码实现。
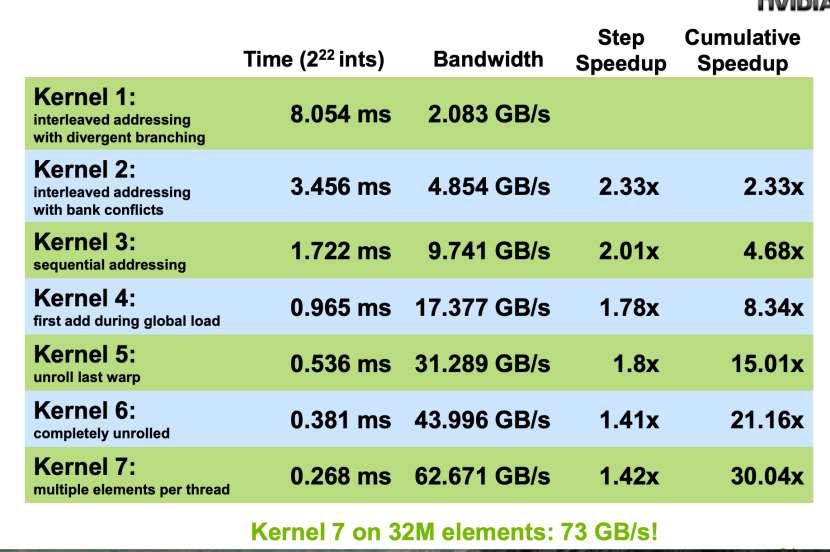
优化效果
这里贴出7个版本的优化效果数据表格:
还能再优化吗?
NVIDIA官方的PPT到这里就结束了。我们可以思考一下:V6版本还能进一步优化吗?
也许还可以,比如用循环展开的技巧和最开始的while循环展开一下,这个就作为open issue供大家探讨了。
开箱即用的实现
数据要求
- 输入:\(m \times n\)矩阵按行优先展开成的一个向量\(x\)
- 输出:\(m\)维向量\(out\)
- 要求线程块内线程的数量(
block_size) \(\leq 1024\),并且为2的整数次幂 - 要求\(n\)一定要能整除
block_size
NVIDIA官方的实现里似乎没有batch的概念,感觉是想要把输入的所有数据都规约到一个值,因此在V3和V6里面会有跨Block规约的情况。
我们这里就不采用这个方案,而是把\(n\)分为了若干个fold,最终的线程数量就是 \(\frac{n}{\text{fold_num}}\),在一开始加载数据时就提前规约fold_num次。这个fold_num由调用方传递。
对于一个batch数量大于1024的情况,和数据数量不是2的整数次幂的情况,则需要调用CUDA的上层框架做处理了,这里暂时不考虑这些case。
代码实现
这一实现使用了C++的模板特性,支持调用者自行选择数据类型和规约函数。
template<typename T>
using ReduceFunc = T(*)(T, T);
template<typename T, ReduceFunc<T> reduce_func, size_t block_size>
__device__ void reduceWarp(volatile T *shared_memory, size_t tid) {
if (block_size >= 64) shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 32]);
if (block_size >= 32) shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 16]);
if (block_size >= 16) shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 8]);
if (block_size >= 8) shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 4]);
if (block_size >= 4) shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 2]);
if (block_size >= 2) shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 1]);
}
/**
* Grid(m, 1, 1)
* Block(block_size, 1, 1)
* @tparam T 需要Reduce的数据类型
* @tparam reduce_func Reduce函数
* @tparam block_size 一个block里的线程数量,要求一定是2的整数次幂,最多支持1024
* @param x 输入矩阵,按行优先展开
* @param out 输出向量
* @param n 一个batch里的元素数量,要求一定能整除block_size
*/
template<typename T, ReduceFunc<T> reduce_func, size_t block_size>
__global__ void ReduceKernelTemplateFinal(const T *x, T *out, const size_t n) {
assert(block_size <= 1024);
assert((block_size & (block_size - 1)) == 0); // 确保n是2的整数次幂
assert((n & (block_size - 1)) == 0); // 确保n能够整除batch_size
extern __shared__ T shared_memory[];
const size_t tid = threadIdx.x;
const size_t fold_num = n >> __builtin_ctz(block_size); // 这里会直接在编译阶段就展开,更高效
size_t i = 1;
size_t last_x_index = blockIdx.x * blockDim.x + tid;
shared_memory[tid] = x[last_x_index];
while (i < fold_num) {
const size_t current_x_index = last_x_index + block_size;
shared_memory[tid] = reduce_func(shared_memory[tid], x[current_x_index]);
last_x_index = current_x_index;
i++;
}
__syncthreads();
// 完成加载阶段,开始规约
if (block_size >= 1024) {
if (tid < 512) {
shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 512]);
__syncthreads();
}
}
if (block_size >= 512) {
if (tid < 256) {
shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 256]);
__syncthreads();
}
}
if (block_size >= 256) {
if (tid < 128) {
shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 128]);
__syncthreads();
}
}
if (block_size >= 128) {
if (tid < 64) {
shared_memory[tid] = reduce_func(shared_memory[tid], shared_memory[tid + 64]);
__syncthreads();
}
}
if (tid < 32) {
reduceWarp<T, reduce_func, block_size>(shared_memory, tid);
}
// 规约完成,写入结果
if (tid == 0) {
out[blockIdx.x] = shared_memory[0];
}
}
template<typename T, ReduceFunc<T> reduce_func>
void InvokeReduceFunc(const T *x, T *out, const size_t m, const size_t n, size_t fold) {
if (n < fold) {
fold = 1;
}
assert(n % fold == 0);
size_t block_size = n / fold;
dim3 grid(m, 1, 1);
dim3 block(block_size, 1, 1);
switch (block_size) {
case 1024:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 1024><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 512:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 512><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 256:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 256><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 128:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 128><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 64:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 64><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 32:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 32><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 16:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 16><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 8:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 8><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 4:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 4><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 2:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 2><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
case 1:
ReduceKernelTemplateFinal<scalar_t, reduce_func, 1><<<grid, block, sizeof(scalar_t) * block_size>>>(x, out, n);
break;
}
}
使用示例
使用起来还是比较简单的,如下所示:
__device__ inline scalar_t sum_reduce_func(scalar_t x, scalar_t y) {
return x + y;
}
void ReduceMax(const CudaArray& a, CudaArray* out, size_t reduce_size) {
/**
* Reduce by taking maximum over `reduce_size` contiguous blocks. Even though it is inefficient,
* for simplicity you can perform each reduction in a single CUDA thread.
*
* Args:
* a: compact array of size a.size = out.size * reduce_size to reduce over
* out: compact array to write into
* redice_size: size of the dimension to reduce over
*/
/// BEGIN SOLUTION
const size_t fold = 4;
const size_t m = a.size / reduce_size;
const size_t n = reduce_size;
InvokeReduceFunc<scalar_t, max_reduce_func>(a.ptr, out->ptr, m, n, fold);
/// END SOLUTION
}
结语
CUDA并行计算入门比较容易,但是要做好很难。NVIDIA官方给了一些如何做性能优化的建议,这里贴在下面供大家参考
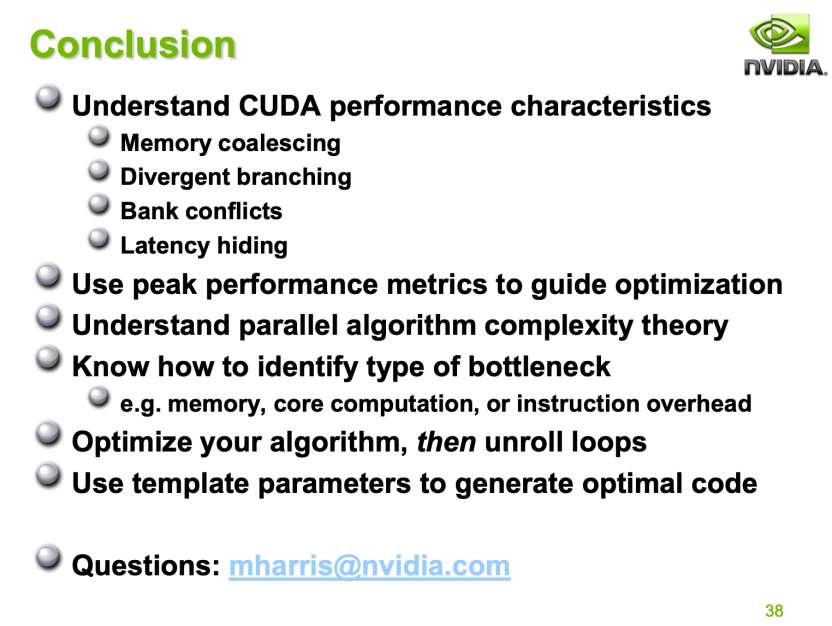
非常感谢NVIDIA的知识开源,这38页PPT可以算得上一个比较好的并行计算优化的教材了。
以上就是本系列文章的全部内容,很感谢屏幕前的读者朋友能耐心看到现在,希望这些内容能帮到大家,如果大家对文章内容有疑问也欢迎在评论区探讨。
手撕深度学习之CUDA并行规约算法(下篇):硬核优化5连击,性能暴涨300%!附开箱即用模板,小白也能秒上手!的更多相关文章
- 解析基于keras深度学习框架下yolov3的算法
一.前言 由于前一段时间以及实现了基于keras深度学习框架下yolov3的算法,本来想趁着余热将自己的心得体会进行总结,但由于前几天有点事就没有完成计划,现在趁午休时间整理一下. 二.Keras框架 ...
- 深度学习 CNN CUDA 版本2
作者:zhxfl 邮箱:zhxfl##mail.ustc.edu.cn 主页:http://www.cnblogs.com/zhxfl/p/4155236.html 第1个版本blog在这里:http ...
- 深度学习必备:随机梯度下降(SGD)优化算法及可视化
补充在前:实际上在我使用LSTM为流量基线建模时候,发现有效的激活函数是elu.relu.linear.prelu.leaky_relu.softplus,对应的梯度算法是adam.mom.rmspr ...
- 深度学习(一)——CNN算法流程
深度学习(一)——CNN(卷积神经网络)算法流程 参考:http://dataunion.org/11692.html 0 引言 20世纪60年代,Hubel和Wiesel在研究猫脑皮层中用于局部敏感 ...
- 【深度学习】BP反向传播算法Python简单实现
转载:火烫火烫的 个人觉得BP反向传播是深度学习的一个基础,所以很有必要把反向传播算法好好学一下 得益于一步一步弄懂反向传播的例子这篇文章,给出一个例子来说明反向传播 不过是英文的,如果你感觉不好阅读 ...
- 深度学习-使用cuda加速卷积神经网络-手写数字识别准确率99.7%
源码和运行结果 cuda:https://github.com/zhxfl/CUDA-CNN C语言版本参考自:http://eric-yuan.me/ 针对著名手写数字识别的库mnist,准确率是9 ...
- 深度学习笔记之目标检测算法系列(包括RCNN、Fast RCNN、Faster RCNN和SSD)
不多说,直接上干货! 本文一系列目标检测算法:RCNN, Fast RCNN, Faster RCNN代表当下目标检测的前沿水平,在github都给出了基于Caffe的源码. • RCNN RCN ...
- [源码解析] 深度学习流水线并行Gpipe(1)---流水线基本实现
[源码解析] 深度学习流水线并行Gpipe(1)---流水线基本实现 目录 [源码解析] 深度学习流水线并行Gpipe(1)---流水线基本实现 0x00 摘要 0x01 概述 1.1 什么是GPip ...
- [源码解析] 深度学习流水线并行 PipeDream(4)--- 运行时引擎
[源码解析] 深度学习流水线并行 PipeDream(4)--- 运行时引擎 目录 [源码解析] 深度学习流水线并行 PipeDream(4)--- 运行时引擎 0x00 摘要 0x01 前言 1.1 ...
- 深度学习多机多卡解决方案-purine
未经允许请不要转载,原作者:zhxfl,http://www.cnblogs.com/zhxfl/p/5287644.html 目录: 一.简介 二.环境配置 三.运行demo 四.硬件配置建议 五. ...
随机推荐
- docusaurus默认访问地址前缀 以及多实例
前言 默认情况下 所有的md文档 都应该以docs为根目录. you-project |--docs |--test.md 而访问路由 也是默认的http://localhost:3000/docs/ ...
- vue中的一个组件就是一个vue实例吗?
所有的 Vue 组件都是 Vue 实例,并且接受相同的选项对象 先说结论 这句话,这是官方文档说的 不过严谨来说,应该是 一个单页应用就是一个 vue 的实例 每个自定义组件就是一个 vueCompo ...
- 【8】AC自动机学习笔记
前言 四大玄学玩意:SPFA,动态规划,组合数学,AC自动机. 前置知识: [5]KMP学习笔记 [6]字典树学习笔记 AC 自动机 给定 \(n\) 个模式串 \(s_i\) 和一个文本串 \(t\ ...
- LSTM 文本预测
LSTM RNN对于前面的信息会有意外,LSTM可以基础相应的信息 code #加载数据 data = open("LSTM_text.txt").read() #移除换行 dat ...
- ble python 成功的例子 创建GATT服务 BLUEZ 5.47
发现是偶然事件,正确的做法可能要修改bluez里面服务的注册方式,把ble的服务发现注册到sdp.具体做法不清楚.但是肯定要修改源码. 工欲善其事,必先利其器 使用未知的工具,现在一个良好的平台上走通 ...
- tigervnc配置
简介 使用vnc 访问 服务器 下载链接 https://bintray.com/tigervnc/stable/tigervnc/1.10.1 简易使用命令 x0vncserver -rfbport ...
- SciTech-BigDataAIML-Statistical Model-Bayes Inference-数据/事实 ∩ 假设: 政治经济、社会和科学分析
SciTech-BigDataAIML-Statistical Model Bayes Inference-数据/事实 ∩ 假设 \(\large \begin{array}{rl} \\ P(H|D ...
- 13Java基础之final关键字、常量详解
final关键字 final关键字是最终的意思,可以修饰(类.方法.变量) 修饰类:该类被称为最终类,特点是不能被继承了.例如工具类. 修饰方法:该方法被称为最终方法,特点是不能被重写了. 修饰变量: ...
- P11363 [NOIP2024] 树的遍历 题解
思路: 从简单情况考虑,所以考虑当 \(k = 1\) 时的答案.可以发现,当我们有了一个关键边之后,到达每个点的边都是确定的,并且,这个点的邻边在新树上会构成一条链,所以除了进入这个点的边以外,其他 ...
- 《算法导论》笔记--归并排序 & 算法原理
归并排序 算法原理: 现在还是沿用牌堆的比喻: 一共两个操作: 1.分解: 现在我们将牌分为两堆,对其中的每一堆都进行 '分为两堆' 这个操作,直到单个堆的元素只有一个 此时每个牌堆都是有序的 2.合 ...