单像空间后方交会(python实现)
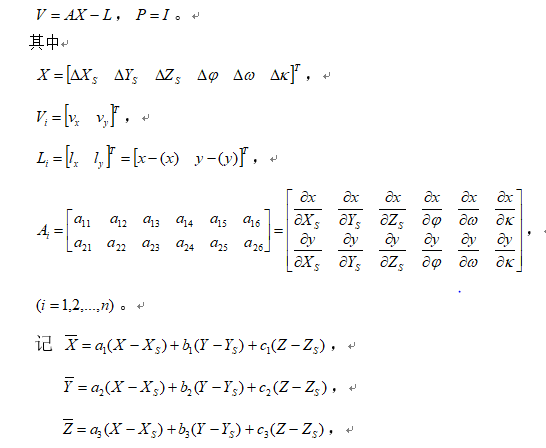
原理:空间后方交会是以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的外方位元素Xs,Ys,Zs,φ,ω,κ。
算法:由于每一对像方和物方对应点可列出2个方程,因此若有3个已知地面坐标的控制点,则可列出6个方程,解求6个外方位元素的改正数△Xs,△Ys,△Zs,△φ,△ω,△κ。实际应用中为了提高解算精度,常有多余观测方程,通常是在影像的四个角上选取4个或均匀地选择更多的地面控制点,因而要用最小二乘平差方法进行计算。
在不考虑控制点误差和内方位元素误差、像点观测值视为等权的情况下,视、、、φ,ω,κ为待定参数(未知数),列出线性化误差方程式如下:
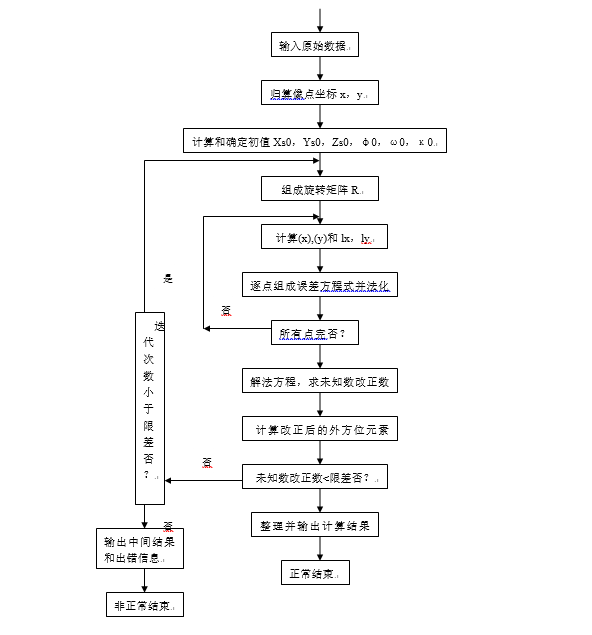
步骤:
1)获取数据。
2)确定Xs、Ys、Zs、φ,ω,κ的初值。
3)计算旋转矩阵R。
4)逐点计算像点坐标的近似值、。
5)逐点计算误差方程式的系数和常数项。
6)计算法方程的系数和常数项。
7)解求未知数Xs、Ys、Zs、φ,ω,κ的改正数。
8)检查计算是否收敛。
将所求得的外方位元素的改正数与规定的限差比较,通常对φ,ω,κ的改正数△φ,△ω,△κ给予限差,通常为0.000001弧度,当3个改正数均小于0.000001弧度时,迭代结束。否则用近似值加上改正数作为新的近似值,重复3)至7)步的计算。如果迭代次数超过某一规定的次数,则停止迭代,认为不收敛,输出中间结果和出错信息。
9)评定精度,计算单位权中误差,其中v为观测值的残差。
示例代码:
# -*- coding: utf-8 -*- import numpy as np
import math as m
##示例数据
X=[36589.41,37631.08,39100.97,40426.54]
Y=[25273.32,31324.51,24934.98,30319.81]
Z=[2195.17, 728.69, 2386.50, 757.31] x=[-86.15,-53.40,-14.78,10.46]
y=[-68.99,82.21,-76.63,64.43] fo = wo = ko = 0
xo = yo = 0
f = 153.24
Zsum = 0
Xsum=0
Ysum=0
for i in [0,1,2,3]:
###Zsum =Zsum + Z[i]
Xsum =Xsum + X[i]
Ysum =Ysum + Y[i] Zos = 7200
Xos = Xsum/4.
Yos = Ysum/4. def r_mat(f,w,k):
Rf = np.mat([[m.cos(f), 0, -m.sin(f)],
[0, 1, 0],
[m.sin(f), 0, m.cos(f)]]) Rw = np.mat([[1, 0, 0],
[0, m.cos(w), -m.sin(w)],
[0, m.sin(w), m.cos(w)]]) Rk = np.mat([[m.cos(k), -m.sin(k), 0],
[m.sin(k), m.cos(k), 0],
[0, 0, 1]]) R = Rf*Rw*Rk return R def xy_approximate(X,Y,Z,x,y,Xs,Ys,Zs,R):
x_apxm = [0,0,0,0]
y_apxm = [0,0,0,0] for i in [0,1,2,3]:
x_apxm[i] =x[i] - (xo - f*((R[0,0]*(X[i]-Xs)+R[1,0]*(Y[i]-Ys)+R[2,0]*(Z[i]-Zs))
/(R[0,2]*(X[i]-Xs)+R[1,2]*(Y[i]-Ys)+R[2,2]*(Z[i]-Zs))))
y_apxm[i] =y[i] - (yo - f*((R[0,1]*(X[i]-Xs)+R[1,1]*(Y[i]-Ys)+R[2,1]*(Z[i]-Zs))
/(R[0,2]*(X[i]-Xs)+R[1,2]*(Y[i]-Ys)+R[2,2]*(Z[i]-Zs)))) return x_apxm,y_apxm def a_parameter(X,Y,Z,Xs,Ys,Zs,x,y,w,k,R):
parameter = np.zeros((2,6))
mean = np.zeros((3,1))
minus = np.zeros((3,1)) minus = np.array([[X-Xs],
[Y-Ys],
[Z-Zs]])
mean = R.T * np.mat(minus) parameter[0][0] = (R[0,0]*f+R[0,2]*(x-xo))/mean[2]
parameter[0][1] = (R[1,0]*f+R[1,2]*(x-xo))/mean[2]
parameter[0][2] = (R[2,0]*f+R[2,2]*(x-xo))/mean[2]
parameter[1][0] = (R[0,1]*f+R[0,2]*(y-yo))/mean[2]
parameter[1][1] = (R[1,1]*f+R[1,2]*(y-yo))/mean[2]
parameter[1][2] = (R[2,1]*f+R[2,2]*(y-yo))/mean[2] parameter[0][3] = (y-yo)*m.sin(w)-(((x-xo)/f)*((x-xo)*m.cos(k)-(y-yo)*m.sin(k))+f*m.cos(k))*m.cos(w)
parameter[0][4] = -f*m.sin(k)-((x-xo)/f)*((x-xo)*m.sin(k)+(y-yo)*m.cos(k))
parameter[0][5] = y-yo
parameter[1][3] = -(x-xo)*m.sin(w)-(((y-yo)/f)*((x-xo)*m.cos(k)-(y-yo)*m.sin(k))-f*m.cos(k))*m.cos(w)
parameter[1][4] = -f*m.cos(k)-((y-yo)/f)*((x-xo)*m.sin(k)+(y-yo)*m.cos(k))
parameter[1][5] = -(x-xo) return parameter x_apxm = [0,0,0,0]
y_apxm = [0,0,0,0] R = np.mat(np.zeros((3,3)))
L = np.mat(np.zeros((8,1)))
A = np.mat(np.zeros((8,6))) f_cor=w_cor=k_cor = 1
flag = 0 while (abs(f_cor)>0.000001) | (abs(w_cor)>0.000001) | (abs(k_cor)>0.000001):
R = r_mat(fo,wo,ko)
x_apxm,y_apxm = xy_approximate(X,Y,Z,x,y,Xos,Yos,Zos,R) for i in [0,1,2,3]:
L[2*i] = x_apxm[i]
L[2*i+1] = y_apxm[i] for i in [0,1,2,3]:
A[2*i:2*i+2,:] = a_parameter(X[i],Y[i],Z[i],Xos,Yos,Zos,x[i],y[i],wo,ko,R) X_mat = np.mat(np.zeros((6,1)))
X_mat = (A.T*A).I*A.T*L f_cor = X_mat[3,0]
w_cor = X_mat[4,0]
k_cor = X_mat[5,0] Xos = Xos + X_mat[0,0]
Yos = Yos + X_mat[1,0]
Zos = Zos + X_mat[2,0]
fo = fo + X_mat[3,0]
wo = wo + X_mat[4,0]
ko = ko + X_mat[5,0] flag += 1
if flag <= 100:
print("第 %d 次迭代:f_cor = %f,w_cor = %f,k_cor = %f" %(flag,f_cor,w_cor,k_cor))
else :
print("级数不收敛,中间结果为:")
break if flag <= 100:
print("级数收敛,最终结果为:")
print(" Xs=%f,\n Ys=%f,\n Zs=%f,\n f=%f,\n w=%f,\n k=%f" %(Xos,Yos,Zos,fo,wo,ko))
print(" R = ", end='')
print(R) V = np.mat(np.zeros((8,1)))
V = A*X_mat - L
errorValue = m.sqrt((V.T*V)/(2*4-6))
print("单位权中误差:%f" %errorValue)
单像空间后方交会(python实现)的更多相关文章
- 单链表的python实现
首先说下线性表,线性表是一种最基本,最简单的数据结构,通俗点讲就是一维的存储数据的结构. 线性表分为顺序表和链接表: 顺序表示指的是用一组地址连续的存储单元依次存储线性表的数据元素,称为线性表的顺序存 ...
- Python与数据结构[0] -> 链表/LinkedList[0] -> 单链表与带表头单链表的 Python 实现
单链表 / Linked List 目录 单链表 带表头单链表 链表是一种基本的线性数据结构,在C语言中,这种数据结构通过指针实现,由于存储空间不要求连续性,因此插入和删除操作将变得十分快速.下面将利 ...
- 用最容易的方式学会单链表(Python实现)
单链表与数组 在本博客中,我们介绍单链表这种数据结构,链表结构为基于数组的序列提供了另一种选择(例如Python列表). 基于数组的序列也会有如下缺点: 一个动态数组的长度可能超过实际存储数组元素所需 ...
- 大学生可用来接单,利用Python实现教务系统扩容抢课!
最近一学期一次的抢课大戏又来了,几家欢乐几家愁.O(∩_∩)O哈哈~(l我每次一选就过了hah,我还是有欧的时候滴).看着他们盯着教务系统就着急,何况我们那教务系统,不想说什么.emmm 想周围的朋友 ...
- Ceres-Solver库入门
示例1:求极值 首先我们以Ceres库官网中的Hello World例子来进行说明.这里例子的目的是为了计算方程取得最小值时x的值.从这个方程很容易看出来当x=10时,f(x)取得最小值0.这个方程虽 ...
- Python学习之单继承与多继承
继承 面向对象编程语言的一个主要功能就是“继承”. 继承是指这样一种能力:它可以使用现有类的所有功能,并在无需重新编写原来的类的情况下对这些功能进行扩展. (1) 单继承:python同时支持类的继承 ...
- python算法与数据结构-单链表(38)
一.链表 链表是一种物理存储单元上非连续.非顺序的存储结构,数据元素的逻辑顺序是通过链表中的指针链接次序实现的.链表由一系列结点(链表中每一个元素称为结点)组成,结点可以在运行时动态生成.每个结点包括 ...
- Python之路【第六篇】python基础 之面向对象(一)
一.三大编程范式 1.面向过程编程 2.函数式编程 3.面向对象编程 二.编程进化论 1.编程最开始就是无组织无结构,从简单控制流中按步写指令 2.从上述的指令中提取重复的代码块或逻辑,组织到一起(比 ...
- python _、__和__xx__的区别
python _.__和__xx__的区别 本文为译文,版权属于原作者,在此翻译为中文分享给大家.英文原文地址:Difference between _, __ and __xx__ in Pytho ...
随机推荐
- Dubbo与Kubernetes集成
Dubbo应用迁移到docker的问题 Dubbo是阿里开源的一套服务治理与rpc框架,服务的提供者通过zookeeper把自己的服务发布上去,然后服务调用方通过zk获取服务的ip和端口,dubbo客 ...
- 第六篇 Flask中的路由系统
Flask中的路由系统其实我们并不陌生了,从一开始到现在都一直在应用 @app.route("/",methods=["GET","POST" ...
- Linux常见命令之文件处理命令
ls命令 ls(选项)(参数) 选项 -a:显示所有档案及目录(ls内定将档案名或目录名称为“.”的视为影藏,不会列出): -A:显示除影藏文件“.”和“..”以外的所有文件列表: -C:多列显示输出 ...
- ABP WebApi的请求类型
Api对应的请求类型分为以下四种方法: 1.POST 2.PUT 3.DELETE 4.GET 一般abp的请求类型都是根据接口命名来定义的,Create——POST,Delete——DELETE,U ...
- Java 干货之深入理解Java内部类
可以将一个类定义在另一个类或方法中,这样的类叫做内部类 --<Thinking in Java> 说起内部类,大家并不陌生,并且会经常在实例化容器的时候使用到它.但是内部类的具体细节语法, ...
- Unity3-各个内置面板,对象说明
*在Inspector面板中,是表示每个物体(诸如摄像机,圆柱,正方体)的组件. 组件包含: 1.Transform,在第一节当中,可以用于变换物体的位置.每个物体对象都有. 2.cube,网格,对于 ...
- MAC配置JAVA环境变量
一.下载安装文件 地址:http://www.oracle.com/technetwork/java/javase/downloads/index.html jdk-8u144-macosx-x64. ...
- 「2019.8.9 考试」神仙的dp总让人无所适从
T1是个容斥,我掐手指一算他为了卡容斥的正确性,绝不会把n和m出的很相近($O(n^2)$算法在nm相等的时候达到最高时间复杂度),不然就太好做了,于是开了特判+各种卡常和滚动数组优化,卡到了70分, ...
- jquery判断手指滑动方向
jquery判断手指滑动方向 <pre> /*判断哪个滑动方向还是自己改下 要么上下 要么左右*/ var startX; var startY; $(".shanghua&qu ...
- Apache Spark 3.0 预览版正式发布,多项重大功能发布
2019年11月08日 数砖的 Xingbo Jiang 大佬给社区发了一封邮件,宣布 Apache Spark 3.0 预览版正式发布,这个版本主要是为了对即将发布的 Apache Spark 3. ...