北理工机器人队RM视觉组ubuntu必备软件安装指南
基础软件安装
sudo apt update && sudo apt upgrade
sudo apt install git curl vim gcc g++
zsh终端安装
sudo apt install zsh curl git vim make cmake
chsh -s /bin/zsh
sh -c "$(curl -fsSL https://raw.githubusercontent.com/robbyrussell/oh-my-zsh/master/tools/install.sh)"
chsh -s /bin/zsh
sudo apt install autojump
git clone git://github.com/zsh-users/zsh-autosuggestions $ZSH_CUSTOM/plugins/zsh-autosuggestions
git clone git://github.com/zsh-users/zsh-syntax-highlighting.git $ZSH_CUSTOM/plugins/zsh-syntax-highlighting
echo 'plugins=(git autojump zsh-autosuggestions zsh-syntax-highlighting)' >> ~/.zshrc
automatic login non-GUI
cmake与make
sudo apt update
sudo apt install cmake make
vscode
下载deb包,安装即可。vscode download
xmake
下载xmake的deb包。xmake下载
下载完成后,安装即可。
在vscode下安装xmake插件。
QT
下载地址
选择5.13.0下载安装即可。中间可能需要注册账号,按照提示注册即可。
安装命令
sudo ./[softwarename]
第三方库安装
eigen
eigen是C++开源线性代数库。
sudo apt install libeigen3-dev
cJSON安装
该c语言库仅用与安装,不需要了解如何使用。
关于cjson的安装必须按照下述的install方式,避免由于安装方式的不同造成兼容性问题。
git clone https://github.com/DaveGamble/cJSON.git
cd cJSON
mkdir build
cd build
cmake ..
make
sudo make install
sudo ldconfig
VTK安装
# https://vtk.org/download/ 下载相应的版本源代码并解压缩
# cd vtk 切换到对应文件夹下
mkdir build
cd build
wget https://www.vtk.org/files/release/8.2/VTKData-8.2.0.zip # 这里的版本号应当与软件版本号相适应
unzip VTKData-8.2.0.zip
rm VTKData-8.2.0.zip
mv VTK-8.2.0/.ExternalData/ ..
cmake -D VTK_USE_CUDA=ON \
-D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D VTK_USE_MPI=ON \
-D VTK_WRAP_PYTHON=OFF \
-D VTK_SMP_IMPLEMENTATION_TYPE=TBB \
..
make -j4
sudo make install
sudo ldconfig
OpenCV安装
解决无法从github下载问题
在hosts文件中增加下面语句
54.231.98.184 github-com.s3.amazonaws.com
在ubuntu下,路径是/etc/hosts.
jetson nano安装
这是在jetson nano下安装OpenCV的教程,开启了CUDA编译,支持VTK和OpenGL,在使用下述脚本安装前,先看后面的报错部分进行环境配置。同时改脚本要求提前安装VTK。
# gpu_install
sudo apt update
sudo apt install -y git gcc g++ make cmake libgtk2.0-dev libgoogle-glog-dev
sudo apt install -y libtesseract-dev libgtkglext1 libgtkglext1-dev ffmpeg
sudo apt install -y libv4l-0 libv4l-dev
sudo apt install -y liblapacke-dev libopenblas-dev libgtk-3-dev libgstreamer-plugins-base1.0-dev
sudo apt install -y libgstreamer1.0-dev libavresample-dev libgphoto2-dev libdc1394-22-dev
sudo apt-get install -y build-essential make cmake cmake-curses-gui git g++ pkg-config curl
sudo apt-get install -y libavcodec-dev libavformat-dev libavutil-dev libswscale-dev libeigen3-dev libglew-dev libgtk2.0-dev
sudo apt-get install -y libtbb2 libtbb-dev libv4l-dev v4l-utils qv4l2 v4l2ucp
sudo apt-get install -y libdc1394-22-dev libxine2-dev libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
sudo apt-get install -y libjpeg8-dev libjpeg-turbo8-dev libtiff-dev libpng-dev
sudo apt-get install -y libxvidcore-dev libx264-dev libgtk-3-dev
sudo apt-get install -y libatlas-base-dev libopenblas-dev liblapack-dev liblapacke-dev gfortran
sudo apt-get install -y qt5-default
sudo apt-get install -y python3-dev python3-testresources
cd opencv-3.4.7
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D WITH_CUDA=ON \
-D CUDA_ARCH_BIN="5.3" \
-D CUDA_ARCH_PTX="5.3" \
-D WITH_CUBLAS=ON \
-D ENABLE_FAST_MATH=ON \
-D CUDA_FAST_MATH=ON \
-D ENABLE_NEON=ON \
-D WITH_GSTREAMER=ON \
-D WITH_LIBV4L=ON \
-D BUILD_opencv_python2=OFF \
-D BUILD_opencv_python3=ON \
-D BUILD_TESTS=OFF \
-D BUILD_PERF_TESTS=OFF \
-D BUILD_EXAMPLES=OFF \
-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-3.4.7/modules \
-D WITH_TBB=ON \
-D BUILD_opencv_world=OFF \
-D WITH_OPENGL=ON \
-D WITH_GTK_2_X=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D EIGEN_INCLUDE_PATH="/usr/include/eigen3" \
-D WITH_XINE=ON \
-D WITH_GDAL=ON \
-D WITH_QT=ON \
..
make -j4
sudo make install
sudo ldconfig
编译完成后可以采用sudo make install进行安装,但是make install安装有一个问题就是需要保留build文件夹才能较为完整地卸载所安装的软件,而Opencv编译后的build文件夹有十多个G,所以十分占用空间,在这里考虑使用Checkinstall代替make install。
Checkinstall是将源码转换成deb或者rpm包的工具,操作简单。在编译完成后,首先修改一下checkinstall的配置文件checkinstallrc,可以通过whereis checkinstallrc查找此文件的位置,打开文件修改BACKUP变量为0(默认为1),这个变量控制在checkinstall过程中是否保存备份文件,由于Opencv编译生成的文件太大,保存备份文件会很耗时,所以选择不保存备份文件。
修改完checkinstall的配置文件后,直接运行sudo checkinstall即可,会在build目录下生成一个.deb包,此时Opencv已经安装上了,以后如果需要删除Opencv,直接运行:sudo dpkg -r build,而如果要安装直接运行sudo dpkg -i build_xxx.deb即可。
报错

该错误解决方案
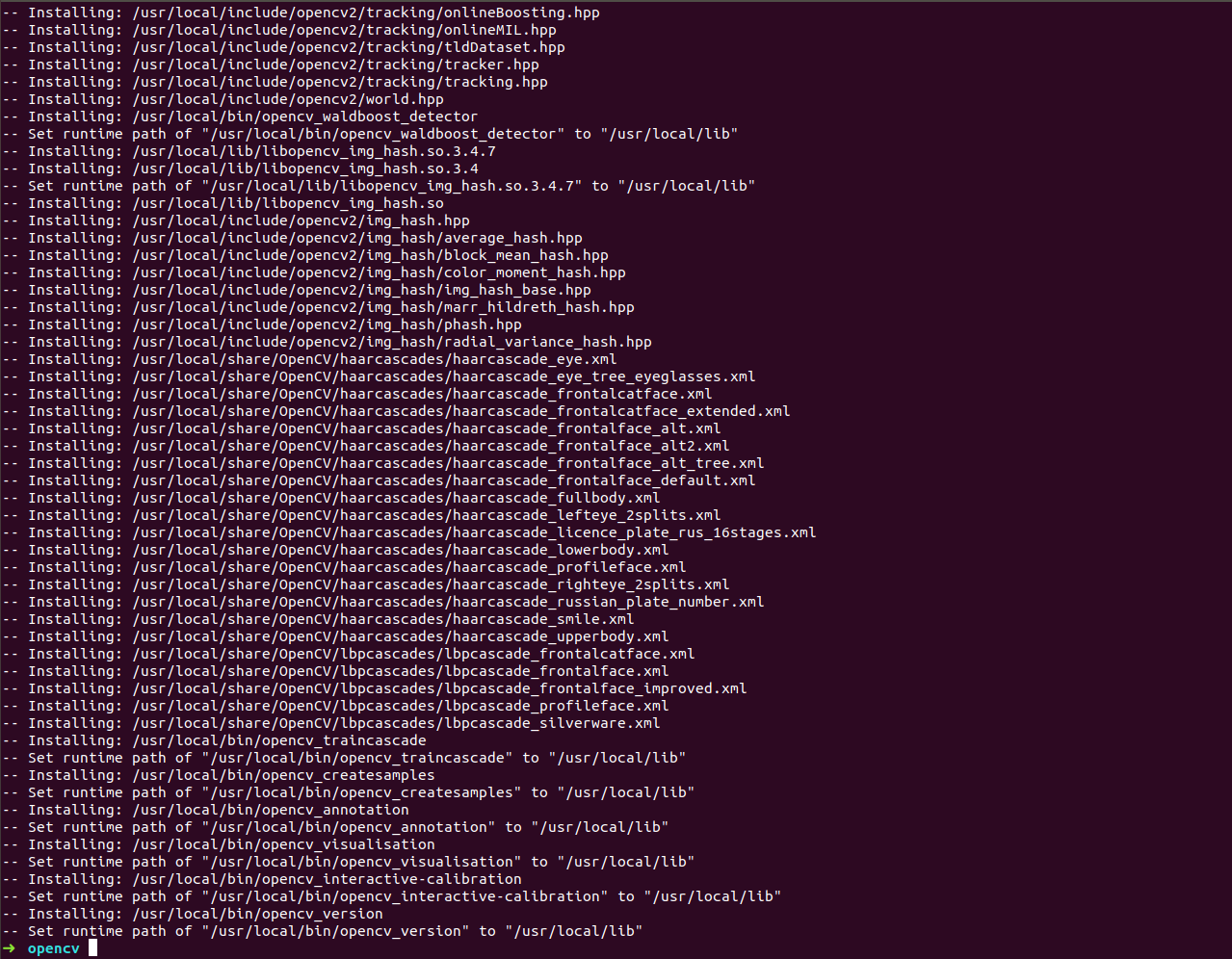
安装成功的界面
flameshot
这是一个截屏软件。
sudo apt install flameshot
设置快捷键:
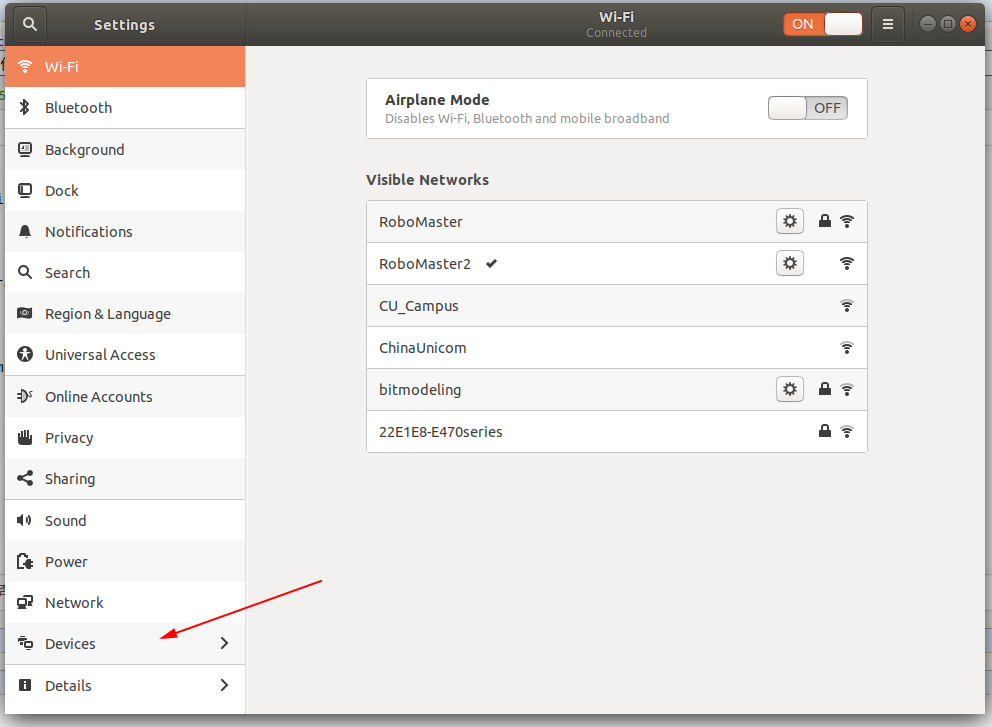
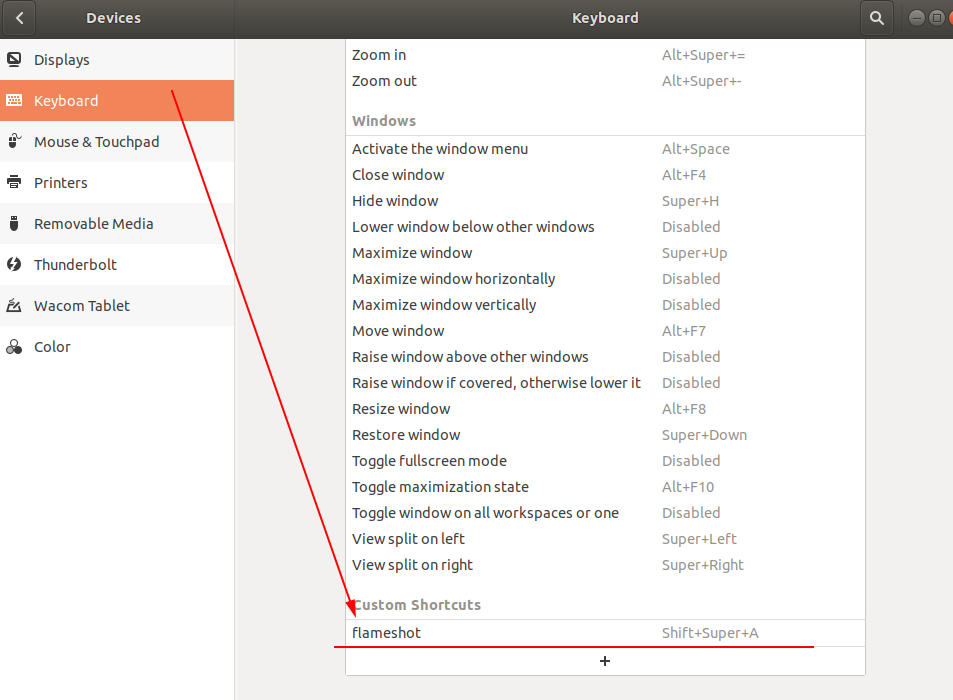
这里点击加号。
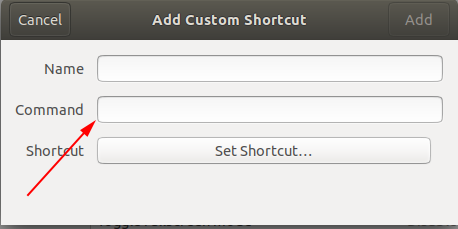
这里设置命令。首先要找到flameshot的位置。

然后输入
/usr/bin/flameshot gui
即可完成设置。
zeal
这是离线的API搜索引擎。
安装地址:zeal
北理工机器人队RM视觉组ubuntu必备软件安装指南的更多相关文章
- 北理工机器人队RM视觉组学习参考汇总(持续更新中)
欢迎大家有意加入北理工机器人队参与到视觉组的工作中.在大家能够正式作为队员参与到视觉组的准备工作之前,北理机器人队需要对各位进行培训.这篇文章主要面向有志于参加机器人队视觉组的同学.同时,欢迎所有对相 ...
- 我的大学,我的SPR机器人队
时间过的真快,我这个在协会呆了好多年的老油条今年都毕业了,在石油大学大学七年几乎三分之二的时间就是在协会度过的.实话说在北京这是我最亲切的地方,这里有我喜欢的各种设备,有亲爱的老师和一起奋斗的队友,在 ...
- C语言练习题_北理工的恶龙
背景:最近,北理工出现了一只恶龙,它长着很多 头,而且还会吐火,它将会把北理工烧成废墟, 于是,校长下令召集全校所有勇士杀死这只恶龙.要杀死这只龙,必须把它所有的头都砍掉,每个勇士只能砍一个龙头,龙的 ...
- NLPIR(北理工张华平版中文分词系统)的SDK(C++)调用方法
一.本文内容简介 二.具体内容 1. 中文分词的基本概念 2.关于NLPIR(北理工张华平版中文分词系统)的基本情况 3.具体SDK模块(C++)的组装方式 ①准备内容: ②开始组装 三.注意事项 一 ...
- 2022徐特立科学营&BIT机器人队电控课程讲义
目录 \(\cdot\)电控简介 \(\cdot\)认识单片机 什么是单片机 时钟-单片机的脉搏 \(\cdot\)外设及应用 GPIO PWM 定时器 UART \(\cdo ...
- Debian系列Linux/Ubuntu 安装软件
wps(http://community.wps.cn/download/) 优客天气(https://launchpad.net/indicator-china-weather/+download) ...
- ubuntu系统安装软件方法
ubuntu系统安装软件方法 ubuntu下安装软件有三种方式,分别为在线安装apt-get方式,软件商店安装方式和 1. 软件商店安装方式 这种方式对经常使用windows系统的同学来说最为简单,因 ...
- [ubuntu]deb软件源
虽然ubuntu的中国服务器的速度已经非常不错,但是难免,会有网络不畅的情形,所以修改软件源地址是一个基础的知识点. 修改ubuntu的软件源的方式有多种,一直是通过ubuntu软件中心提供的UI,还 ...
- Ubuntu 中软件的安装、卸载以及查看的方法总结
Ubuntu 中软件的安装.卸载以及查看的方法总结 博客分类: Linux UbuntuDebian配置管理CacheF# 说明:由于图形化界面方法(如Add/Remove... 和Synaptic ...
随机推荐
- linux 环境下 apache tomcat 安装jenkins
参考文档: https://blog.51cto.com/12629984/1980034 https://www.cnblogs.com/lxs1314/p/8567652.html https:/ ...
- JDK8在接口中引入的default
default关键字介绍 default是在java8中引入的关键字,也可称为Virtual extension methods——虚拟扩展方法.是指,在接口内部包含了一些默认的方法实现(也就是接口中 ...
- JS高阶---为什么说JS是单线程执行的???
大纲: [主体] (1)如何证明JS运行是单线程的? 上述代码执行顺序结果为:fn()→timeout →timeout 接下来对上述代码做下修改 执行结果如右图所示 接下来点击确认,关闭弹框,再往后 ...
- ssh 到服务器然后输入中文保存到本地变成乱码
很有可能是 默认的编码导致的 尝试执行 echo $LANG 如果是 en_US vim 输入中文有较大概率是 GBK 编码 尝试把这个加入到 ~/.bashrc export LANG=zh_CN. ...
- android 开发工具 adb
1.abd基本使用 1.启动一个adb应用程序 adb -P <port> start-server # -P指定端口 默认是5037 1.停止adb adb kill-server 2. ...
- 01-numpy-笔记-empty
import numpy as np >>> a = np.empty([2,3]) >>> a array([[0.00000000e+000, 4.935933 ...
- Premiere Pro cc 2019 下载链接
[安装环境]:win7/win8/win10 [64位下载] 百度网盘链接:pan.baidu.com/s/1mUDK5-CLafUDXn2Rsl-Mjw 提取码:ecx4
- python SSL 错误
python 使用pip 安装模块是提示SSL错误 出现该问题的原因由于系统的openssl是1.0.1的版本,对于python3.7太老了,需要更新为openssl1.0.2或者libressl2. ...
- 洛谷P1706 全排列问题
题目描述 输出自然数1到n所有不重复的排列,即n的全排列,要求所产生的任一数字序列中不允许出现重复的数字. 输入输出格式 输入格式: n(1≤n≤9) 输出格式: 由1-n组成的所有不重复的数字序列, ...
- Java链接Oracle
首先在Navicat里面链接Oracle: 连接时老报错:ORA-12505, TNS:listener does not currently know of SID given in connect ...