Arduino入门笔记(9):蓝牙模块及第一辆蓝牙遥控小车
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi
一、本次实验所需器材
1、Arduino UNO板 https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-15820725129.16.AtgoEm&id=545093340395
2、蓝牙模块
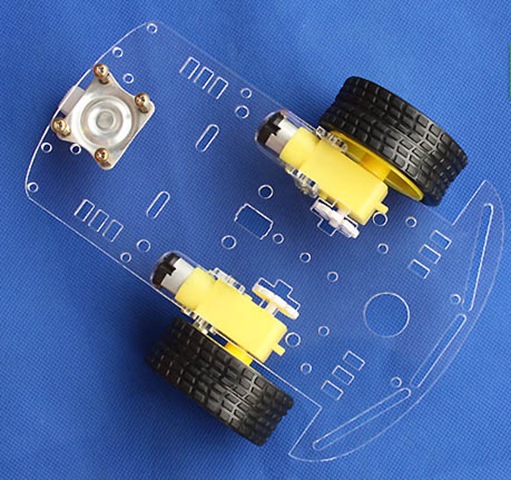
3、蓝牙小车底盘(可从淘宝网购买)
4、L298驱动模块:1个
3、面包板:1个
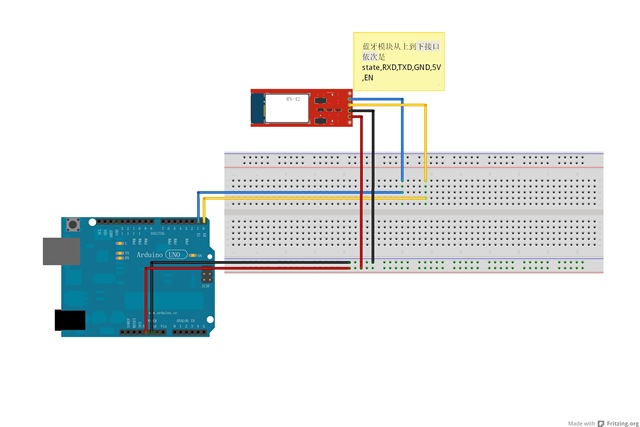
二、蓝牙模块的使用
实验:给蓝牙模块发送h,回复i am here;发送b,回复see you.
硬件连接:
代码:
char getstr;
void setup()
{
Serial.begin();
}
void loop()
{
getstr=Serial.read();
if(getstr=='h')
{
Serial.println("I am here!");
}
else if(getstr=='b'){
Serial.println("See you!");
}
}
将以上代码写入arduino时,要注意先将蓝牙断开,写入完成后,再连上蓝牙,否则会出错。
手机端下载一个bluetooth spp或者蓝牙串口程序即可,这里我用的是http://www.mumayi.com/android-92724.html。
然后通过手机与该蓝牙模块进行连接,一般默认连接码是1234或者0000。连接后,发送h,会显示I am here,发送b,会显示See you!
三、蓝牙遥控小车制作
1、从网上购买了蓝牙小车底盘,组装后如下图:
2、L298驱动模块
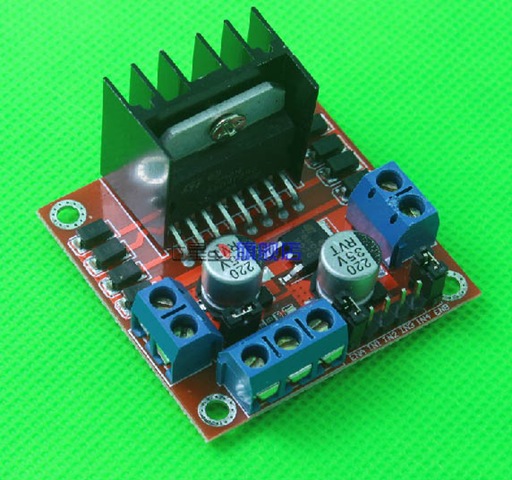
该模块的IN1、IN2、IN3、IN4分别连接arduino的12、11、10、9接口,电源12V口接arduino的5V,GND接地。
例子:
char getstr;
int in1=12;
int in2=11;
int in3=10;
int in4=9;
//上面定义了板上的4个控制端,12一组,34一组
void _mRight(int pin1,int pin2)//当in1和in2中有一个接高位时,电机会向某一方向转动
{
digitalWrite(pin1,HIGH);
digitalWrite(pin2,LOW);
}
void _mLeft(int pin1,int pin2)//同上
{
digitalWrite(pin1,LOW);
digitalWrite(pin2,HIGH);
}
void _mStop(int pin1,int pin2)//紧急制动,实际就是将电机两个端短接了
{
digitalWrite(pin1,HIGH);
digitalWrite(pin2,HIGH);
}
void setup()
{
Serial.begin(9600);
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
pinMode(in3,OUTPUT);
pinMode(in4,OUTPUT);
//下面程序开始时让控制端都为高电平,电机保持不动。
digitalWrite(in1,HIGH);
digitalWrite(in2,HIGH);
digitalWrite(in3,HIGH);
digitalWrite(in4,HIGH);
}
void loop()
{
getstr=Serial.read();
if(getstr=='f')
{
Serial.println("go forward!");
_mStop(in1,in2);
_mStop(in3,in4);
_mRight(in1,in2);
_mRight(in3,in4);
}
else if(getstr=='b'){
Serial.println("go back!");
_mStop(in1,in2);
_mStop(in3,in4);
_mLeft(in1,in2);
_mLeft(in3,in4);
}
else if(getstr=='l'){
Serial.println("go left!");
_mStop(in1,in2);
_mStop(in3,in4);
_mRight(in1,in2);
_mLeft(in3,in4);
}
else if(getstr=='r'){
Serial.println("go right!");
_mStop(in1,in2);
_mStop(in3,in4);
_mRight(in3,in4);
_mLeft(in1,in2);
}
else if(getstr=='s'){
Serial.println("Stop!");
_mStop(in1,in2);
_mStop(in3,in4);
}
}
注意,当输入f\b\l\r时,无论前往、后退、左转、右转,电机都是先停一下,再转,这样电机都流畅。
3、蓝牙模块
接法与二中蓝牙模块的使用接法相同。
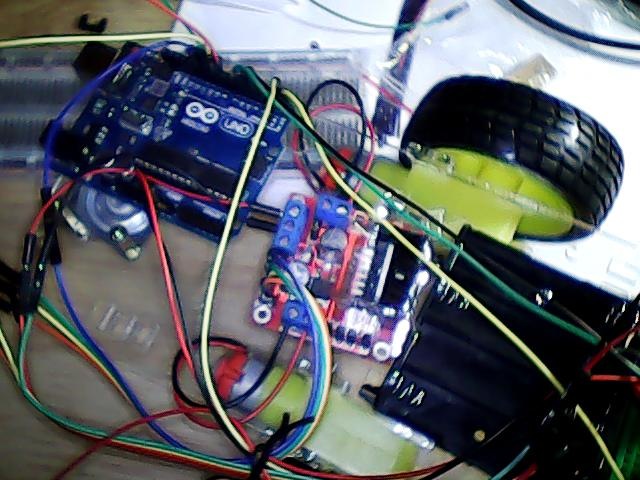
4、超声波测距模块
连接方法是将VCC接5V,GND接地,trig接5口,Echo接6口。
5、硬件连接图


6、代码
char getstr;
int in1=;
int in2=;
int in3=;
int in4=;
//上面定义了板上的4个控制端,12一组,34一组
int TrigPin = ;
int EchoPin = ;
float cm;
int i=;//记录测量次数,每5次取一下平均值
float cmsum;//计算5次总值
float cmeve;//计算5次平均值 void _mRun(int pin1,int pin2)//电机右转,电机到底是右转还是左转取决于电机端的接线和控制脚的顺序
{
digitalWrite(pin1,HIGH);
digitalWrite(pin2,LOW);
}
void _mBack(int pin1,int pin2)//同上
{
digitalWrite(pin1,LOW);
digitalWrite(pin2,HIGH);
}
void _mStop(int pin1,int pin2)//紧急制动,实际就是将电机两个端短接了
{
digitalWrite(pin1,HIGH);
digitalWrite(pin2,HIGH);
} void setup()
{
Serial.begin();
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
pinMode(in3,OUTPUT);
pinMode(in4,OUTPUT);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);
//下面程序开始时让控制端都为高电平,电机保持不动。
digitalWrite(in1,HIGH);
digitalWrite(in2,HIGH);
digitalWrite(in3,HIGH);
digitalWrite(in4,HIGH);
} void loop()
{
getstr=Serial.read();
delayMicroseconds();
digitalWrite(TrigPin, HIGH);
delayMicroseconds();
digitalWrite(TrigPin, LOW); cm = pulseIn(EchoPin, HIGH) / 58.0; //将回波时间换算成cm
cm = (int(cm * 100.0)) / 100.0; //保留两位小数 if (i==){//连接测5次,计算平均值,如果小于10厘米则紧急停车
i=;
cmeve=cmsum/;
cmsum=; if (cmeve< and cmeve>) {
Serial.println(cmeve);
_mStop(in1,in2);
_mStop(in3,in4);
}
}
else {
i=i+;
cmsum=cmsum+cm;
} if(getstr=='f')
{
Serial.println("go forward!");
_mStop(in1,in2);
_mStop(in3,in4);
_mRun(in1,in2);
_mRun(in3,in4);
}
else if(getstr=='b'){
Serial.println("go back!");
_mStop(in1,in2);
_mStop(in3,in4); _mBack(in1,in2);
_mBack(in3,in4);
}
else if(getstr=='l'){
Serial.println("go left!");
_mStop(in1,in2);
_mStop(in3,in4); _mRun(in1,in2);
_mBack(in3,in4);
}
else if(getstr=='r'){
Serial.println("go left!");
_mStop(in1,in2);
_mStop(in3,in4); _mRun(in3,in4);
_mBack(in1,in2);
}
else if(getstr=='s'){
Serial.println("Stop!");
_mStop(in1,in2);
_mStop(in3,in4);
}
}
7、视频
Arduino入门笔记(9):蓝牙模块及第一辆蓝牙遥控小车的更多相关文章
- Arduino入门笔记(4):用蜂鸣器演奏音乐并配有LED闪烁
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.Arduino板 https://item.taoba ...
- Arduino入门笔记(1):认识Arduino
转载请注明:@小五义http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 各种网站论坛里经常看到网友DIY各种遥控小车.机器人什么的,一直很好奇,很想学习一 ...
- Arduino入门笔记(3):单LED闪烁
转载请注明:@小五义http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 在搭建好arduino开发环境(http://www.cnblogs.com/xi ...
- Arduino入门笔记(6):温度传感器及感温杯实验
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.Arduino板 :https://item.taob ...
- Arduino入门笔记(5):1602液晶实验(实现时钟)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.Arduino板 https://item.taoba ...
- Arduino入门笔记(8):利用12864和ADXL345学习重力感应控制
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.Arduino UNO板 https://item.t ...
- Arduino入门笔记(7):利用1602、1302实现时钟和定时器
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 常常听到老妈在做饭时说“开锅15分钟后叫我一下”,为何不做个定时器,来提醒老妈呢 ...
- Arduino入门笔记(2):Arduino的开发和virtualbreadboard仿真环境
欢迎加入讨论群 64770604 1.开发环境 (1)下载开发环境 Arduino的开发环境从http://arduino.cc/en/Main/Software官网下载即可,分为windows版本. ...
- Arduino入门笔记【1】
刚刚接触这个东西只知道这是类似于单片机的开发板,可以做一些单片机实现或者不能实现的东西,但是比单片机要简单得多. Arduino到底是什么? 维基百科上的描述是:Arduino是一块开发板的微控制器和 ...
随机推荐
- C# 免客户端访问Oracle的DLL
代码示例: OracleConnection con = new OracleConnection(); con.ConnectionString ="user ...
- 关于chrome 插件PageMonitor 安装及使用步骤
首先是安装: 第一步:打开谷歌浏览器的设置界面(如果没有谷歌浏览器需要下载安装下) 然后 点击左侧扩展程序:出现如下图 然后把附件中Page_Monitor_Chrome.crx文件托到扩展程序界面, ...
- HDU1257(dp)
最少拦截系统 Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)Total Subm ...
- JS代理模式实现图片预加载
---恢复内容开始--- 刚刚说了懒加载,现在我们来搞搞预加载吧 预加载的核心: 图片等静态资源在使用前提前请求. 资源后续使用可以直接从缓存中加载,提升用户体验. 几个误区: 预加载不是为了减少页面 ...
- 【代码笔记】iOS-只让textField使用键盘通知
代码: #import "ViewController.h" @interface ViewController () @end @implementation ViewContr ...
- Flex布局的学习经验
做为css布局的又一种新方式,Flex拥有极强的使用效果,相比原来的float,position对元素样式的操作更加简洁,本文是我的一点学习经验和心得吧,如有错误以及不足之处,请多多指点. 好进入正题 ...
- 在ASP.NET MVC 中使用ActiveReports报表控件
随着MVC模式的广泛运用,对Web应用系统的开发带来了巨大的影响,我们好像又回到了原来的ASP时代,视乎这是一种后退而不是一种进步,不过MVC模式给我们带来的影响不仅限于我们所看到的这一点..MVC看 ...
- SQLServer SQL连接查询深度探险(摘录
SQL连接查询深度探险[摘录] 测试环境: Windows XP Profession MySQL 5.0.45 Oracle 9i DB2 UDB 9.1 测试的SQL脚本如下:此脚本适合MySQL ...
- RecyclerView--添加头部和底部
1.先构建WrapRecyclerAdapter /** * Description: 可以添加头部和底部的Adapter */ public class WrapRecyclerAdapter ex ...
- 与HttpSession相关的监听器
概述 与HttpSession相关的监听器有四个:分别是HttpSessionListener.HttpSessionAttributeListener.HttpSessionBindingListe ...