矢量水听器 近场 远场 --------------------常规波束形成,MVDR的比较
摘自《水平线阵的反卷积常规波束形成》,IRONMAN---------------------------------------------------
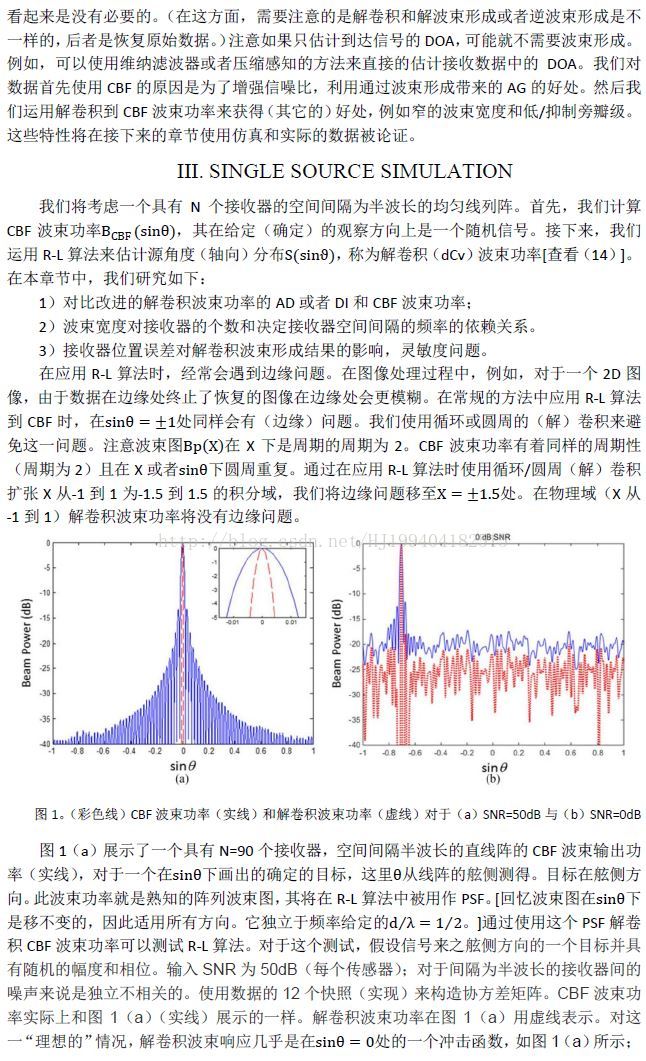
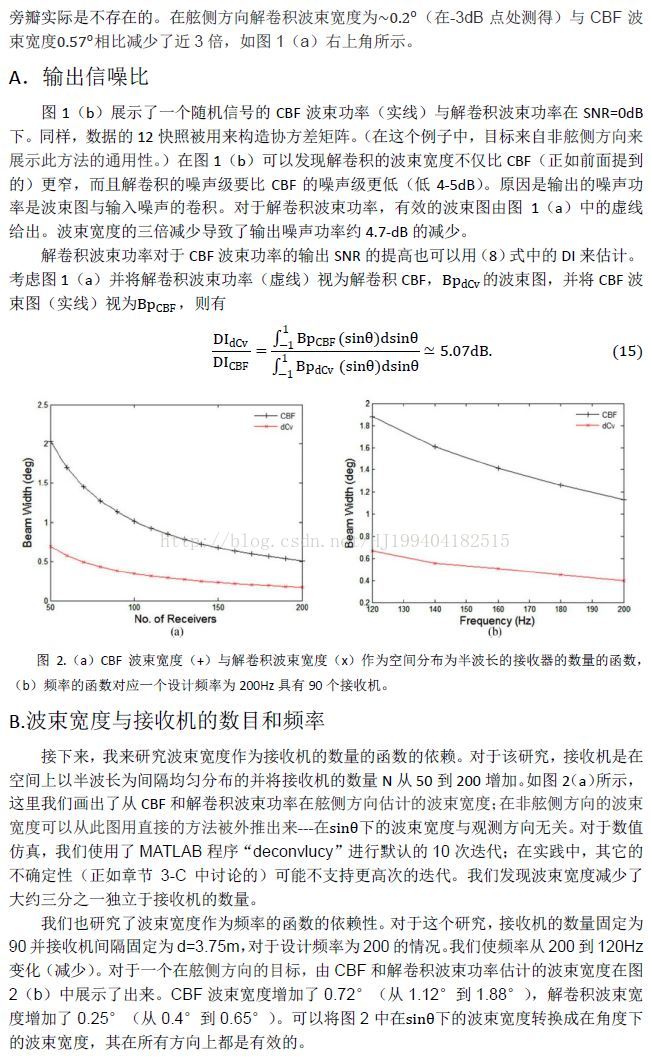
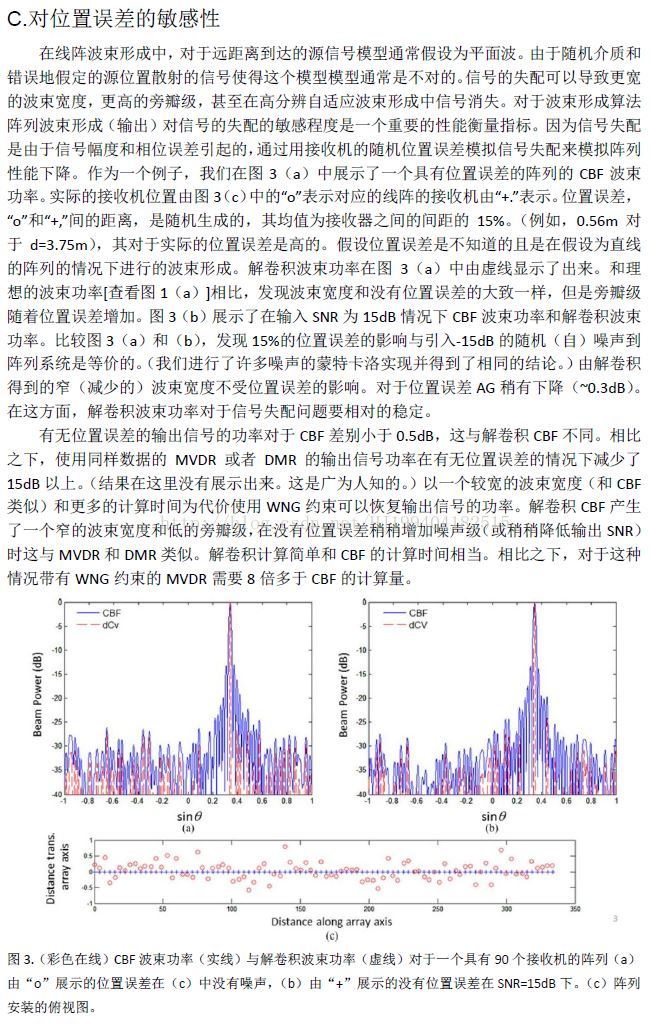
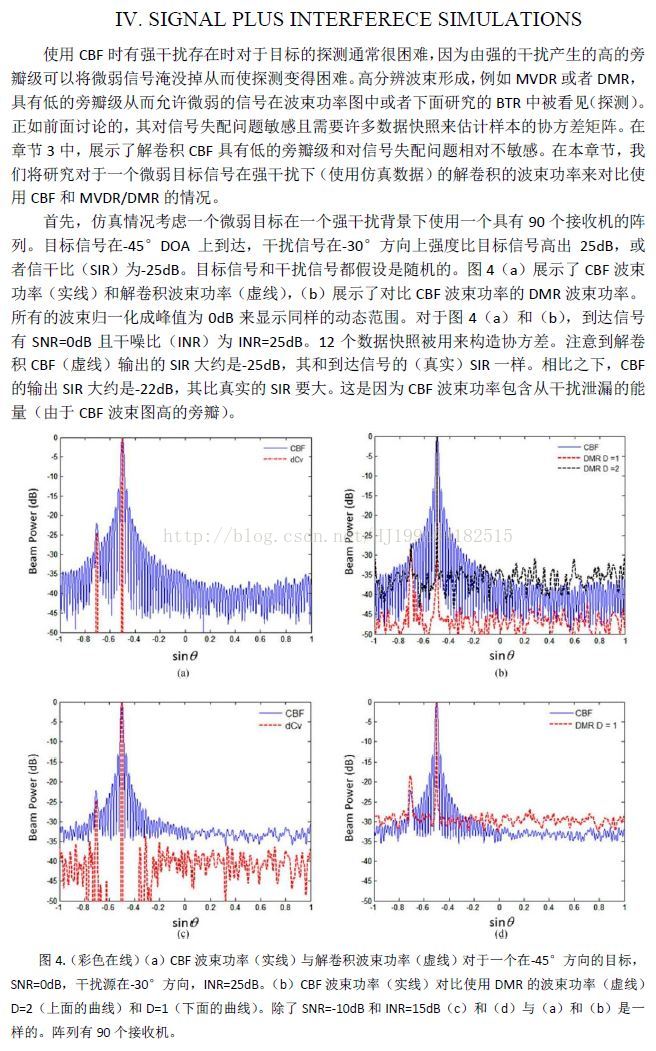
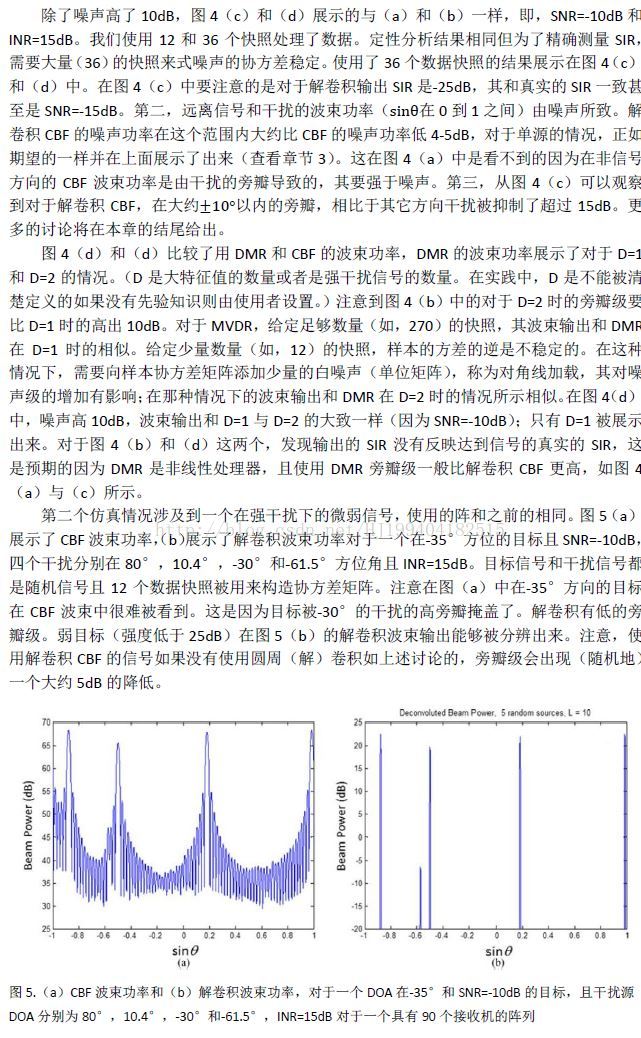
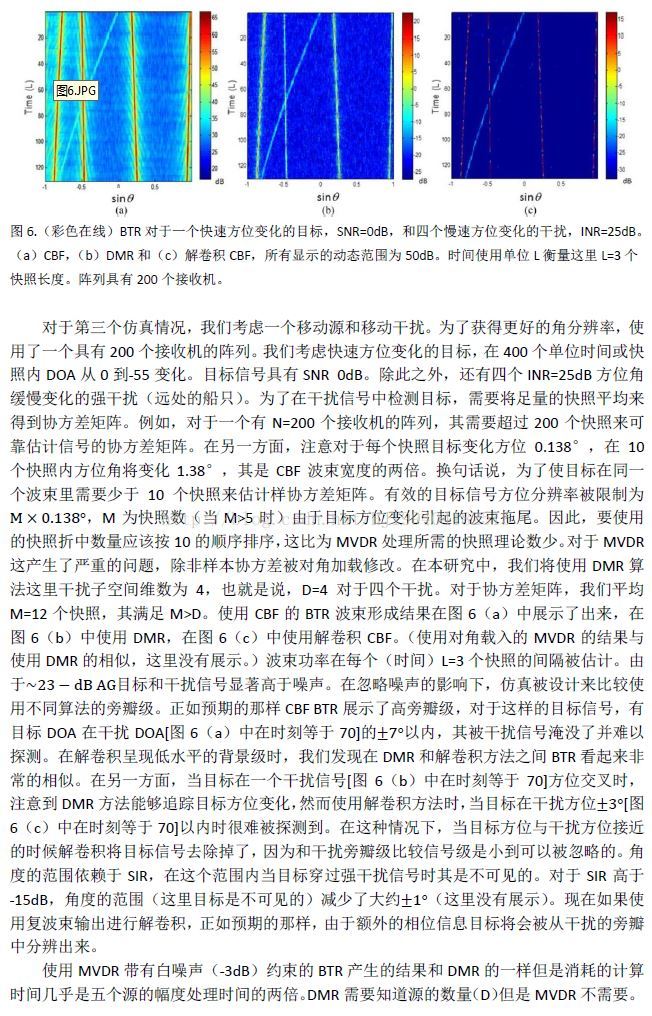
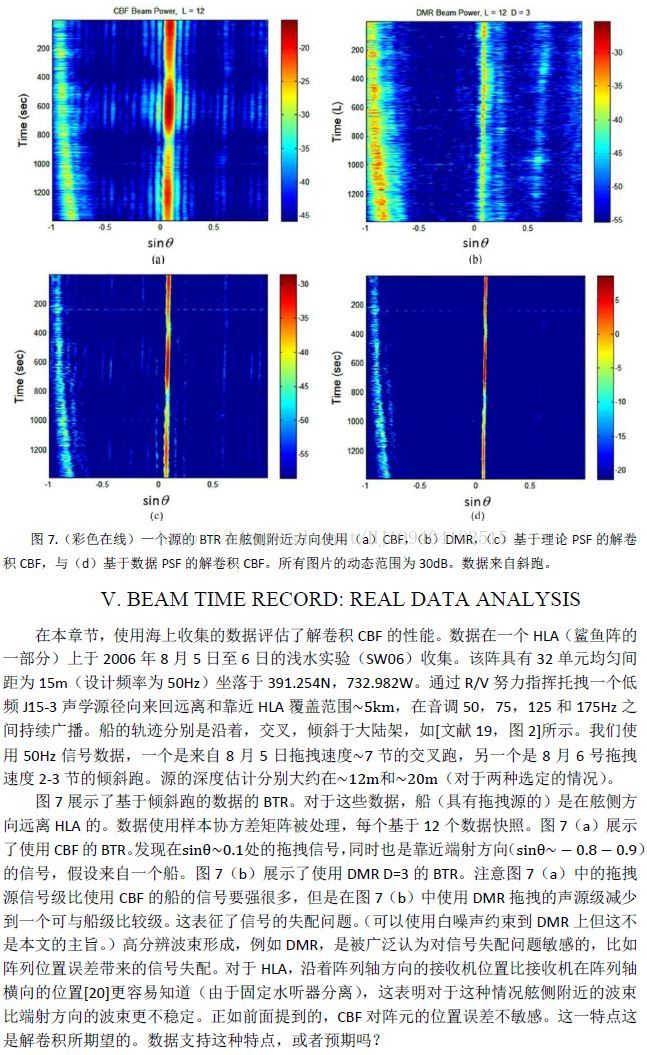
在常规的波束形成中,是将阵列上的每个接收机的同时刻数据乘上一个预设的系数然后求和并最终得到一系列的具有特定指向性的波束。但是由此得到的波束它的主瓣宽度很宽而且旁瓣衰减有限,能量泄漏很严重。为了解决这些问题,许多的学者提出了一些高分辨的波束形成算法,MVDR和DMR就是其中的代表。然而这些算法虽然能够得到很窄的波束宽度和低的旁瓣级,但是需要大量的数据样本来估计数据的协方差矩阵(如MVDR),计算量很大,而且当目标方位变化很快的时候,这种方法的性能将大打折扣甚至变得不稳定。对于DMR其需要事先知道目标的个数这一先验知识,而往往目标的个数事先是未知的,因此它的应用受到了限制。针对这些问题T.C.Yang教授创造性的将解卷积的方法应用到常规波束形成中,效果显著。此方法于2016年首次被提出,文章的题目是Deconvolved Conventional Beamforming for a Horizontal Line Array,在IEEE JOURNAL OF OCEANIC ENGINEERING上发表。为了方便大家阅读,博主将其翻译成了中文版的,如果有什么不对的地方,还请大家批评指正。
仿真程序:
%------------矢量水听器 近场 远场 常规波束形成 MVDR-----0722-----
clc; clear all; close all;
%-----------信号模型--------------
M=12;
N=1024;
f0=1000;
fs=10*f0;
c=1500;
lamda=c/f0; %波长
w=2*pi*f0;
k=w/c;
d=lamda/2;
t=0:N-1;
snr=10;%信噪比
theta=30*pi/180;%入射角度
A=sqrt(2*10^(snr/10));
s=A*exp(-j*w*t/fs);
%----------远场 常规波束形成--------------
for m=1:M
Sp(m,:)=A*exp(-j*(w*t/fs+k*(m-1)*d*cos(theta)))+randn(size(t))/3;
Sx(m,:)=A*exp(-j*(w*t/fs+k*(m-1)*d*cos(theta)))*cos(theta)+randn(size(t))/3;
Sy(m,:)=A*exp(-j*(w*t/fs+k*(m-1)*d*cos(theta)))*sin(theta)+randn(size(t))/3;
end
S=[Sp.',Sx.',Sy.'];
R=cov(S);
theta1=-180:180; for i=1:length(theta1)
for m=1:M
Wp(m)=exp(-j*k*(m-1)*d*cos(theta1(i)*pi/180));
Wx(m)=exp(-j*k*(m-1)*d*cos(theta1(i)*pi/180))*cos(theta1(i)*pi/180);
Wy(m)=exp(-j*k*(m-1)*d*cos(theta1(i)*pi/180))*sin(theta1(i)*pi/180);
end
W=[Wp,Wx,Wy];
P(i)=W*R*W';
Pm(i)=1/(W*(R^-1)*W');
end
%-----------归一化-----------------
pp=max(abs(P));
P=20*log10(P/pp);
ppm=max(abs(Pm));
Pm=20*log10(Pm/ppm);
%----------------------------------
figure
plot(theta1,P);
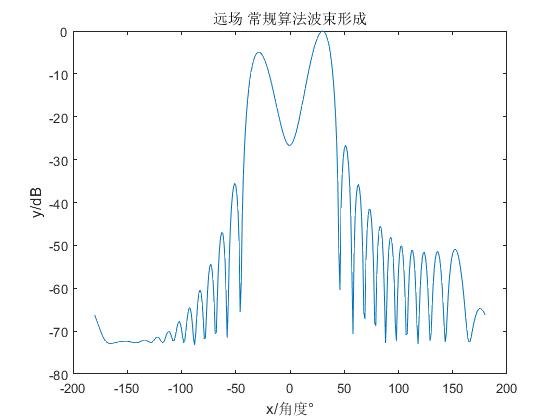
title('远场 常规算法波束形成') xlabel('x/角度°') ylabel('y/dB') ;
%-----------------------------------
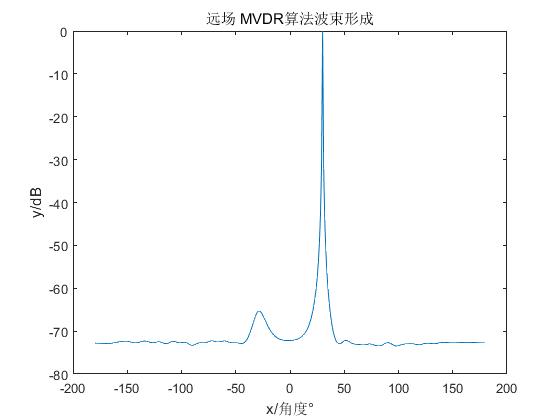
figure
plot(theta1,Pm);
title('远场 MVDR算法波束形成') xlabel('x/角度°') ylabel('y/dB')
%------------------------------------
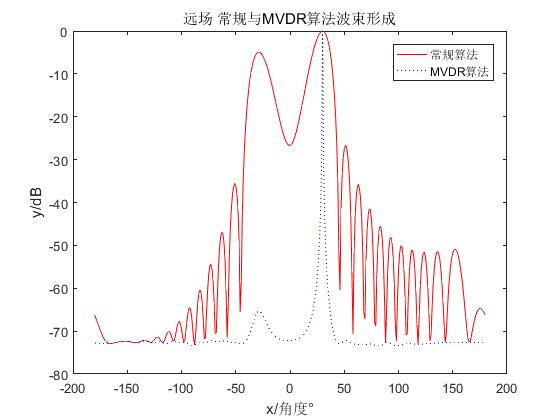
figure
plot(theta1,P,'r-',theta1,Pm,'b:');
title('远场 常规与MVDR算法波束形成'); xlabel('x/角度°'); ylabel('y/dB'); legend('常规算法','MVDR算法');
%----------近场 波束形成--------------
x0=15; y0=20; % 目标位置x0 % 目标位置y0
for m=1:M
theta2(m,:)=atan(y0/(x0-(m-1)*d));
r(m,:)=sqrt(y0^2+((x0-(m-1)*d))^2);
SMp(m,:)=A*exp(-j*(w*t/fs+k*r(m,:)))+randn(size(t))/3;
SMx(m,:)=A*exp(-j*(w*t/fs+k*r(m,:))).*cos(theta2(m,:))+randn(size(t))/3;
SMy(m,:)=A*exp(-j*(w*t/fs+k*r(m,:))).*sin(theta2(m,:))+randn(size(t))/3;
end
SM=[SMp.',SMx.',SMy.'];
RM=cov(SM);
x=-30:0.5:30;
y=-30:0.5:30;
for xx=1:length(x)
hwait=waitbar(0,'请等待>>>>>>>>');
step=length(x)/100;
if length(x)-xx<=5
waitbar(xx/length(x),hwait,'即将完成');
pause(0.1);
else
PerStr=fix(xx/step);
str=['正在运行中',num2str(PerStr),'%'];
waitbar(xx/length(x),hwait,str);
pause(0.1);
end
close(hwait);
for yy=1:length(y)
for m=1:M
theta3=atan(y(yy)/(x(xx)-(m-1)*d));
r2=sqrt(y(yy)^2+((x(xx)-(m-1)*d))^2);
WMp(m)=exp(-j*k*r2);
WMx(m)=exp(-j*k*r2)*cos(theta3);
WMy(m)=exp(-j*k*r2)*sin(theta3);
end
WM=[WMp,WMx,WMy];
PP(xx,yy)=WM*RM*WM';
PPm(xx,yy)=1/(WM*(RM^-1)*WM');
end
end
size(xx) size(yy) size(PP)
figure
imagesc(x,y,abs(PP')) colorbar; colormap gray;
title('近场 常规算法波束形成') xlabel('x/米'); ylabel('y/米'); axis xy;

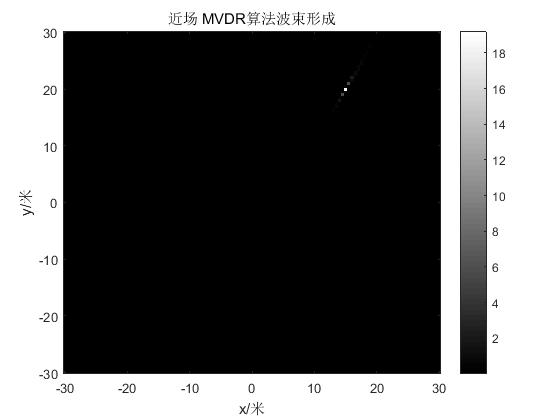
figure
imagesc(x,y,abs(PPm')) title('近场 MVDR算法波束形成') xlabel('x/米'); ylabel('y/米'); axis xy; colorbar; colormap gray;
参考:
https://blog.csdn.net/HJ199404182515/article/details/73882953
矢量水听器 近场 远场 --------------------常规波束形成,MVDR的比较的更多相关文章
- 5G/NR OTA (Over The Air) 测试详解
原文链接:http://www.sharetechnote.com/html/5G/5G_OTA.html 1 什么是OTA (Over The Air) OTA代表Over The Air.为了使用 ...
- Analysis of Two-Channel Generalized Sidelobe Canceller (GSC) With Post-Filtering
作者:凌逆战 地址:https://www.cnblogs.com/LXP-Never/p/12071748.html 题目:带后置滤波的双通道广义旁瓣相消器(GSC)的分析 作者:Israel Co ...
- WebService安全加密
众所周知,WebService访问API是公开的,知道其URL者均可以研究与调用.那么,在只允许注册用户的WebService应用中,如何确保API访问和通信的安全性呢?本文所指的访问与通信安全性包括 ...
- 为什么在AI领域网络安全更重要?先睹为快~
AI迎来了改变世界的新机遇,同时也迎来了新的网络安全问题,只要是联网的系统就会有漏洞爆出~ 随着大数据的应用,人工智能逐渐走入千家万户并显示出巨大的市场空间,从机器人客服.自动驾驶汽车到无人机等,全都 ...
- 【自适应波束形成】MVDR(Minimum Variance Distortionless Response )笔记
参考: https://blog.csdn.net/qq_40981790/article/details/80143524 1. MVDR简介(Minimum Variance Distortion ...
- 麦克风阵列波束形成之DSB原理与实现
语音识别有近场和远场之分,且很多场景下都会用到麦克风阵列(micphone array).所谓麦克风阵列是一组位于空间不同位置的麦克风按一定的形状规则布置形成的阵列,是对空间传播声音信号进行空间采样的 ...
- 空间谱专题02:波束形成(Beamforming)
作者:桂. 时间:2017-08-22 10:56:45 链接:http://www.cnblogs.com/xingshansi/p/7410846.html 前言 本文主要记录常见的波束形成问题 ...
- HTML5矢量实现文件上传进度条
在HTML中,在文件上传的过程中,很多情况都是没有任何的提示,这在体验上很不好,用户都不知道到时有没有在上传.上传成功了没有,所以今天给大家介绍的内容是通过HT for Web矢量来实现HTML5文件 ...
- 基于HT for Web矢量实现3D叶轮旋转
在上一篇<基于HT for Web矢量实现2D叶轮旋转>中讲述了叶轮旋转在2D上的应用,今天我们就来讲讲叶轮旋转在3D上的应用. 在3D拓扑上可以创建各种各样的图元,在HT for Web ...
随机推荐
- About Gnu Linker1
1 OverView ld combines a number of object and archive files, relocates their data and ties up symbol ...
- Qt之QTreeWidget入门
QTreeWidget的一些基本操作 1.insertTopLevelItems,insertTopLevelItem用来添加顶层的item QTreeWidget *treeWidget = new ...
- New Journey--工作五年所思所感小记
正式参加工作满五年了,2013年7月9日走入游戏行业.之前就计划着应该提笔写点什么留下来,但当日子真的到了,竟是不知说些什么了.14年年中的时候我曾写过一篇工作一年的总结,现在回头读起来,还真是别有一 ...
- 取消win10 任务栏已固定的软件
通过组策略编辑器 设置为“已禁用”,就可 ,自由取消已固定的图标.
- TopSnackbar,在顶部滑出显示的Snackbar;
TopSnackbar 既然你能找到这篇文章,说明你一定使用过或了解Snackbar,所以我就不介绍Snackbar了.嗯~有图有真相! 嗯,就是图上这样: 我把Snackbar的源码拉了过来,重写了 ...
- C博客01——分支,顺序结构
C博客01--分支,顺序结构 1. 本章学习总结 1.1 思维导图 请以思维导图总结本周的学习内容. 1.2 本章学习体会及代码量体会 1.2.1 学习体会 对于C语言课程的理解,我有点吃力,不是说老 ...
- MySQL实现分组取组内特定数据的功能
需求:在MySQL5.7环境下,查询下面表中,各个学科前两名的学生的成绩: 1.准备数据 窗机表以及向表中插入数据 创建一张表: DROP TABLE IF EXISTS `grade`; CREAT ...
- tongweb安装后无法启动问题
安装后执行bin下的启动文件,但是管理界面依然无法打开 1.确认破解的dat文件是否在跟目录下,是否过期 2.如果jdk64位试试下面的方法:JAVA_HOME/jre/lib/ext/下缺少包 su ...
- PyQt5实现邮件合并功能(GUI)
1. 实战Word批量 需要处理批量替换word的一些数据,数据源从Excel中来. Excel的百分数会变为数字,以及浮点数会多好多精度,为了原汁原味的数据,直接复制数据到文本文件.通过\t来分隔即 ...
- HTTPS 基本流程2
Https在真正请求数据前,先会与服务有几次握手验证,以证明相互的身份,以下图为例 2.1 验证流程 注:文中所写的序号与图不对应但流程是对应的 1 客户端发起一个https的请求,把自身支持的一系 ...