SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要
ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的作用。本章节主要内容:
7.理解tf的原理
(1)机器人中的坐标系
一个机器人系统中通常会有多个三维参考坐标系,而且这些坐标系之间的相对关系随时间推移会变化。这里举一个实际的机器人应用场景例子,来说明这种关系和变化:
全局世界坐标系:通常为激光slam构建出来的栅格地图的坐标系map。
机器人底盘坐标系:通常为机器人底盘的坐标系base_footprint。
机器人上各部件自己的坐标系:比如激光雷达、imu等传感器自己的坐标系base_laser_link、imu_link。
这些坐标系之间的关系有些是静态的、有些是动态的。比如当机器人底盘移动的过程中,机器人底盘与世界的相对关系map->base_footprint就会随之变化;而安装在机器人底盘上的激光雷达、imu这些传感器与机器人底盘的相对关系base_footprint->base_laser_link、base_footprint->imu_link就不会随之变化。其实,这个很好理解。
如图25中,map->base_footprint会随着底盘的移动而变化,即动态坐标系关系。
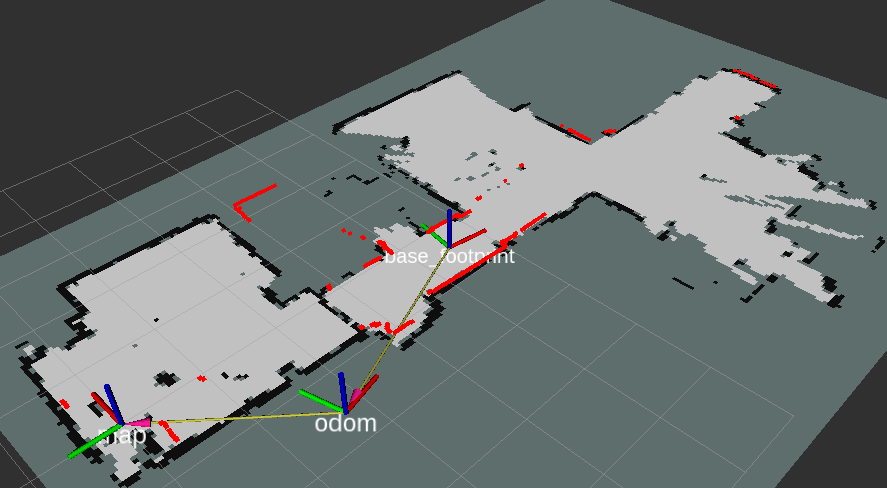
(图25)动态坐标系关系
如图26中,base_footprint->base_laser_link、base_footprint->imu_link不会随着底盘的移动而变化,即静态坐标系关系。

(图26)静态坐标系关系
(2)机器人坐标关系工具tf
由于坐标及坐标转换在机器人系统中非常重要,特别是机器人在环境地图中自主定位和导航、机械手臂对物体进行复杂的抓取任务,都需要精确的知道机器人各部件之间的相对位置及机器人在工作环境中的相对位置。因此ROS专门提供了tf这个工具用于简化这些工作。
tf可以让用户随时跟踪多个坐标系的关系,机器人各个坐标系之间的关系是通过一种树型数据结构来存储和维护的,即tf tree。借助这个tf tree,用户可以在任意时间将点、向量等数据的坐标在两个坐标系中完成坐标值变换。
如图27,为一个自主导航机器人的tf tree结构图。圆圈中是坐标系的名称,箭头表示两个坐标系之间的关系,箭头上会显示该坐标关系的发布者、发布速率、时间戳等信息。
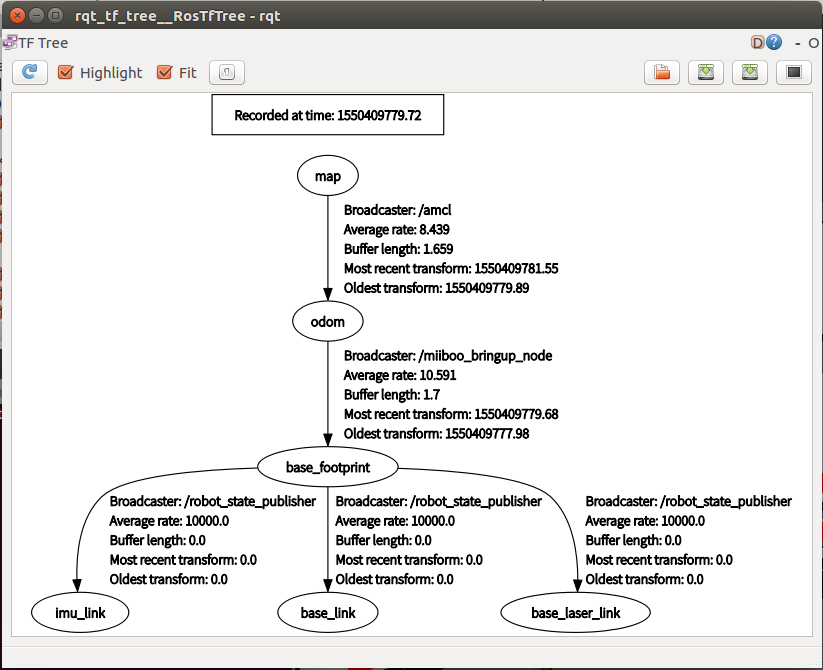
(图27)一个自主导航机器人的tf tree结构图
(3)使用tf
使用tf分为两个部分,广播tf变换、监听tf变换。
广播tf变换:
ROS网络中的节点可以向系统广播坐标系之间的变换关系。比如负责机器人全局定位的amcl节点会广播map->odom的变换关系,负责机器人局部定位的轮式里程计计算节点会广播odom->base_footprint的变换关系,机器人底盘上安装的传感器与底盘的变换关系可以通过urdf机器人模型进行广播(urdf将在后面实际机器人中进行讲解)。每个节点的广播都可以直接将变换关系插入tf tree,不需要进行同步。通过多个节点广播坐标变换的关系,便可以实现tf tree的动态维护。
关于广播tf变换的具体程序实现,请直接参考ROS官方教程http://wiki.ros.org/tf/Tutorials
监听tf变换:
ROS网络中的节点可以从系统监听坐标系之间的变换关系,并从中查询所需要的坐标变换。比如要知道机器人底盘当前在栅格地图坐标系下的什么地方,就可以通过监听map->base_footprint来实现,比如要知道机器人底盘坐标系上的某个坐标点在世界坐标系下的坐标是多少,就可以通过监听map->base_footprint,并通过map->base_footprint这个变换查询出变换后的坐标点取值。
关于监听tf变换的具体程序实现,请直接参考ROS官方教程http://wiki.ros.org/tf/Tutorials
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——8.理解roslaunch在大型项目中的作用
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——9.熟练使用rviz
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——10.在实际机器人上运行ROS高级功能预览
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- BZOJ_3252_攻略_线段树+dfs序
BZOJ_3252_攻略_线段树+dfs序 Description 题目简述:树版[k取方格数] 众所周知,桂木桂马是攻略之神,开启攻略之神模式后,他可以同时攻略k部游戏.今天他得到了一款新游戏< ...
- Python并发编程之深入理解yield from语法(八)
大家好,并发编程 进入第八篇. 直到上一篇,我们终于迎来了Python并发编程中,最高级.最重要.当然也是最难的知识点--协程. 当你看到这一篇的时候,请确保你对生成器的知识,有一定的了解.当然不了解 ...
- 求二维数组的最大子数组———曹玉松&&蔡迎盈
继上节课老师让求了一维数组最大的子数组后,这节课堂上,老师加深了难度,给了一个二维数组,求最大子数组,开始觉得很容易,但是自己思考起来感觉这个算法很困难,既需要考虑数组直接的连续,又要求出最大的,老师 ...
- 【SAP HANA】新建表以及操作数据(3)
账号和数据库都创建好之后,接下来就可以创建表了.来见识一下这个所谓“列式”存储方式的表是长啥样的! 一.可视化新建表 然后输入所需栏位,设置好类型和长度: 上图右上角可以看到类型是Column Sto ...
- pyqt5实现注册界面并获得文本框内容
获取框里面的内容,有一个BUG,搞了好久才搞定. __author__ = 'ayew'import sysfrom PyQt5.QtCore import*from PyQt5.QtWidgets ...
- 循环神经网络之LSTM和GRU
看了一些LSTM的博客,都推荐看colah写的博客<Understanding LSTM Networks> 来学习LSTM,我也找来看了,写得还是比较好懂的,它把LSTM的工作流程从输入 ...
- MIP ACCESS细节剖析
什么是 MIP ACCESS MIP ACCESS 由百度 MIP 团队开发的一种页面访问权限控制机制,能够允许网页发布者在页面元素中定义内容标记,并结合用户访问情况进行综合评价,从而展现或隐藏页面中 ...
- RabbitMQ和Kafka到底怎么选?
前言 开源社区有好多优秀的队列中间件,比如RabbitMQ和Kafka,每个队列都貌似有其特性,在进行工程选择时,往往眼花缭乱,不知所措.对于RabbitMQ和Kafka,到底应该选哪个? Rabbi ...
- 使用jdbc拼接条件查询语句时如何防止sql注入
本人微信公众号,欢迎扫码关注! 使用jdbc拼接条件查询语句时如何防止sql注入 最近公司的项目在上线时需要进行安全扫描,但是有几个项目中含有部分老代码,操作数据库时使用的是jdbc,并且竟然好多都是 ...
- 学习 javascript (一)javascript 简介
javascript 从一个简单的输入验证器发展成为一门强大的编程语言. 历史 以前我们输入一个表单,点击完提交后,服务器发送反馈给我们.比如填写姓名的时候,我们在前端不能限定人们只能输入汉字,需要服 ...