Ceva定理的四种证明方法
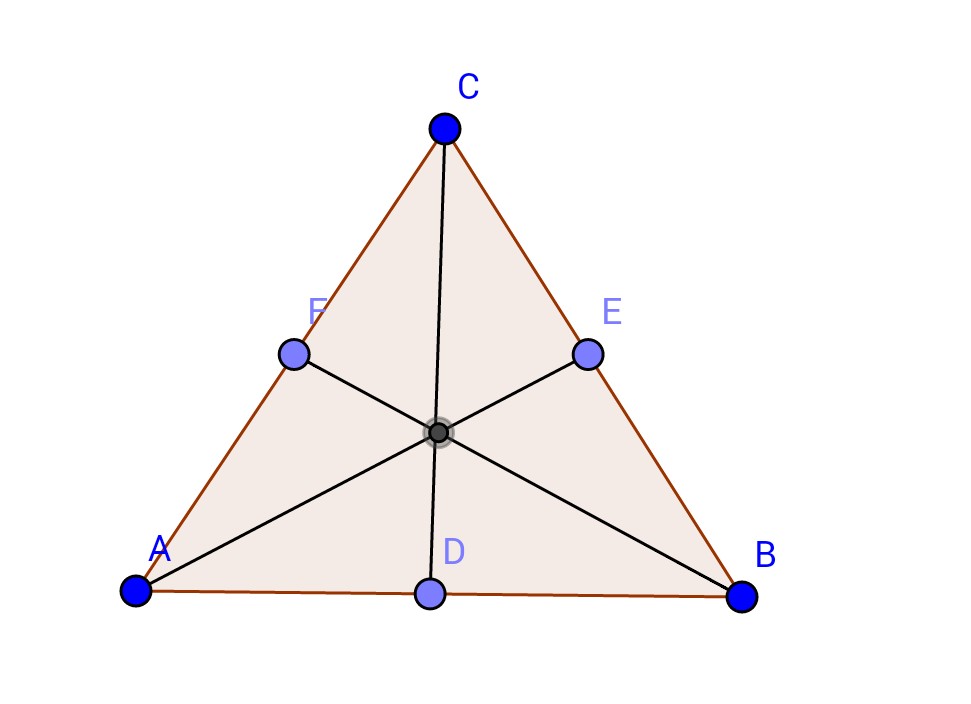
${\color{Teal} {Ceva定理}}$设$D、E、F$依次为三角形ABC的边$AB、BC、CA$的内点,记
$λ$=(A,B,D),$μ$=(B,C,E),$v$=(C,A,F)
求证:三条线段$AE、BF、CD$交于一点的充要条件是$λμv$=1
$\textbf{法一(向量法)}$
pf:
因为$$λ=(A,B,D)$$所以$$λ=\frac{AD}{DB}$$所以$$\overrightarrow {AD}=\frac{λ}{1+λ}\overrightarrow {AB}$$
同理$$\overrightarrow {BE}=\frac{μ}{1+μ}\overrightarrow {BC}$$ $$\overrightarrow {CF}=\frac{v}{1+v} \overrightarrow {CA}$$
$$\overrightarrow {CD}=\overrightarrow {CA}+\overrightarrow {AD}=\frac{1}{1+λ}\overrightarrow {CA}+\frac{λ}{1+λ}\overrightarrow {CB}$$
设CD、AE交于点O,令$\overrightarrow {CO}=α\overrightarrow {CD},\overrightarrow {AO}=β\overrightarrow {AE}$
$$\overrightarrow {CO}=\overrightarrow {BO}-\overrightarrow {BC}=\frac{α}{1+λ}\overrightarrow {CA}+\frac{αλ}{1+λ}\overrightarrow {CB}$$
$$\overrightarrow {BO}=\frac{α}{1+λ}\overrightarrow {CA}+\frac{αλ-λ-1}{1+λ}\overrightarrow {CB}$$
$$\overrightarrow {AE}=\overrightarrow {AB}+\overrightarrow {BE}=-\overrightarrow {CA}+\frac{1}{1+μ}\overrightarrow {CB}$$
$$\overrightarrow {AO}=\overrightarrow {BO}-\overrightarrow {BA}=β(\frac{1}{1+μ}\overrightarrow {CB}-\overrightarrow {CA})$$
所以$$\overrightarrow {BO}=(1-β)\overrightarrow {CA}+\frac{β-1-μ}{1+μ}\overrightarrow {BC}$$
由此我们得到$$\frac{α}{1+λ}=1+β$$ $$\frac{αλ-λ-1}{1+λ}=\frac{β-μ-1}{1+μ}$$
所以$$α=\frac{1+λ}{1+λ+λμ}$$ $$β=\frac{λ+μλ}{1+λ+μλ}$$
所以$$\overrightarrow {BO}=\frac{1}{1+λ+λμ}[\overrightarrow {CA}-(1+μλ)\overrightarrow {CB}]$$
$$\overrightarrow {BF}=\overrightarrow {BC}+\overrightarrow {CF}=\frac{1}{1+v}[v\overrightarrow {CA}-(1+v)\overrightarrow {CB}]$$
充分性证明
O在BF上,则 $$\frac{1}{v}=\frac{1+λμ}{1+v}$$ 即$$λμv=1$$
必要性证明
已知$λμv$=1
所以$$\overrightarrow {BF}=\frac{v(1+λ+λμ)}{1+v}\overrightarrow {BO}$$
所以$B、O、F$三点共线
$\textbf{法二:坐标法}$
在平面仿射坐标系$[A,\overrightarrow {AD},\overrightarrow {AC}]$中
得$B:(\frac{1+λ}{λ},0),C(0,1),D(1,D),E:(\frac{1+λ}{λ(1+μ)},\frac{μ}{1+μ}),F:(0,\frac{1}{1+v})$
设O点坐标为$(\frac{(1+λ)x}{λ(1+μ)},\frac{μx}{1+μ})$
由$D、C、O$三点共线知$$\frac{(1+λ)x}{λ(1+μ)}+\frac{μx}{1+μ}=1$$
所以$$x=\frac{λ(1+μ)}{1+λ+λμ}$$ 所以O点坐标为$(\frac{1+λ}{1+λ+λμ},\frac{λμ}{1+λ+λμ})$
$B、O、F$共线等价于$$\begin{vmatrix} \frac{1+λ}{λ}& 0& 1\\ 0& \frac{1}{1+v}& 1\\ \frac{1+λ}{1+λ+λμ}& \frac{λμ}{1+λ+λμ} & 1 \end{vmatrix}=0$$ 即$$(1+λ)(1-λμv)=0$$ 即$$λμv=1$$
${\color{Blue} 注}$
当然如果建立仿射空间坐标系
$$C(1,0,0)、A(0,1,0)、B(0,0,1)$$
$$D(0,0,λ)、E(μ,0,1)、F(1,v,0)$$
则$$\overrightarrow {CD}=(0,λ,-1)$$ $$\overrightarrow {AE}=(-1,0,μ)$$ $$\overrightarrow {BF}=(v,-1,0)$$ 若$CD、AE、BF$三点共线于点O
则$$\begin{vmatrix} 0& λ& -1\\ -1& 0& μ\\ v& -1& 0 \end{vmatrix}=0$$ 即$$λμv-1=0$$ $$λμv=1$$
$\textbf{法三(梅氏定理)}$
对于$△CAD$和截线$FOB$
由梅氏定理得 $$\frac{AB}{BD} \frac{DO}{OC} \frac{CF}{FA}=-1$$ 同理可得$$\frac{BE}{EC} \frac{OC}{OD} \frac{DA}{AB}=-1$$ 两式相乘$$\frac{AD}{BD} \frac{BE}{EC} \frac{CD}{FA}=1$$ 即$$λμv=1$$
$\textbf{法四(面积比)}$
设$S_{△AOC}=S_{1},S_{△AOB}=S_{2},S_{△BOC}=S_{3}$
则$$\frac{CF}{AF}=\frac{S_{3}}{S_{2}}$$
$$\frac{AD}{BD}=\frac{S_{1}}{S_{3}}$$
$$\frac{BE}{EC}=\frac{S_{2}}{S_{1}}$$
三式相乘得 $$\frac{CF}{AF} \frac{AD}{BD} \frac{BE}{EC}=1$$
即$$λμv=1$$
Ceva定理的四种证明方法的更多相关文章
- C#四种深拷贝方法
//四种深拷贝方法 public static T DeepCopyByReflect<T>(T obj) { //如果是字符串或值类型则直接返回 if (obj is string || ...
- C语言中返回字符串函数的四种实现方法 2015-05-17 15:00 23人阅读 评论(0) 收藏
C语言中返回字符串函数的四种实现方法 分类: UNIX/LINUX C/C++ 2010-12-29 02:54 11954人阅读 评论(1) 收藏 举报 语言func存储 有四种方式: 1.使用堆空 ...
- CSS当中color的四种表示方法
这是我的第一篇博客,所以写的东西会比较简单. css当中,好多地方都会用到color属性,用来使html内容丰富多彩,例如:background-color:border-color: 第一种表示法使 ...
- C语言中返回字符串函数的四种实现方法
转自C语言中返回字符串函数的四种实现方法 其实就是要返回一个有效的指针,尾部变量退出后就无效了. 有四种方式: 1.使用堆空间,返回申请的堆地址,注意释放 2.函数参数传递指针,返回该指针 3.返回函 ...
- sass学习笔记 -- sass的四种编译方法
sass的四种编译方法:(.scss) (一)ruby下的命令行编译 首先需要安装ruby,注意需勾选Add Ruby executables to your PATH选项,以添加环境变量. ruby ...
- Django的POST请求时因为开启防止csrf,报403错误,及四种解决方法
Django默认开启防止csrf(跨站点请求伪造)攻击,在post请求时,没有上传 csrf字段,导致校验失败,报403错误 解决方法1: 注释掉此段代码,即可. 缺点:导致Django项目完全无法防 ...
- HashMap的四种遍历方法,及效率比较(简单明了)
https://yq.aliyun.com/ziliao/210955 public static void main(String[] args) { HashMap<Integer, Str ...
- 百度地图和高德地图坐标系的互相转换 四种Sandcastle方法生成c#.net帮助类帮助文档 文档API生成神器SandCastle使用心得 ASP.NET Core
百度地图和高德地图坐标系的互相转换 GPS.谷歌.百度.高德坐标相互转换 一.在进行地图开发过程中,我们一般能接触到以下三种类型的地图坐标系: 1.WGS-84原始坐标系,一般用国际GPS纪录仪记 ...
- AJPFX关于Java中运用数组的四种排序方法
JAVA中在运用数组进行排序功能时,一般有四种方法:快速排序法.冒泡法.选择排序法.插入排序法.快速排序法主要是运用了Arrays中的一个方法Arrays.sort()实现.冒泡法是运用遍历数组进行比 ...
随机推荐
- 网络学习笔记(二):TCP可靠传输原理
TCP数据段作为IP数据报的数据部分来传输的,IP层提供尽最大努力服务,却不保证数据可靠传输.TCP想要提供可靠传输,需要采取一定的措施来让不可靠的传输信道提供可靠传输服务.比如:出现差错时,让发 ...
- Bootstrap 前端框架 遇到的问题 解决方案
bootstrap实现导航栏的响应式布局,当在小屏幕.手机屏幕浏览时自动折叠隐藏 直接放代码,更容易理解.下次可以套这个代码 <!DOCTYPE html> <html> &l ...
- Python:序列的增量赋值
增量赋值运算符有 += 和 *=.+= 背后的特殊方法是 __iadd__,如果一个类没有实现 __iadd__ 方法,Python 会退一步调用 __add__ 方法.这两个方法的区别在于,__ia ...
- Redis哨兵机制
Redis Sentinel物理结构图 角色 IP Port 别名 master 127.0.01 6379 主节点 slave-1 127.0.01 6380 slave-1节点 slave-2 1 ...
- RDIFramework.NET ━ .NET快速信息化系统开发框架 V3.2版本正式发布
RDIFramework.NET .NET快速信息化系统开发框架 V3.2版本 正式发布 精益求精求完美! 1.RDIFramework.NET框架介绍 RDIFramework.NET,基于.NE ...
- jquery快速入门(四)
jQuery 遍历 向上遍历 DOM 树 parent() parent() 方法返回被选元素的直接父元素.该方法只会向上一级对 DOM 树进行遍历. parents() parents() 方法返回 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- WPF 水印TextBox WatermarkTextBox
//https://blog.csdn.net/puchitomato/article/details/12248691 转自以上链接,自己添加了Enter响应事件. public class ...
- java 深克隆(深拷贝)与浅克隆(拷贝)详解
java深克隆和浅克隆 基本概念 浅复制(浅克隆) 被复制对象的所有变量都含有与原来的对象相同的值,而所有的对其他对象的引用仍然指向原来的对象.换言之,浅复制仅仅复制所拷贝的对象,而不复制它所引用的对 ...
- Hadoop综合大作业
Hadoop综合大作业 要求: 用Hive对爬虫大作业产生的文本文件(或者英文词频统计下载的英文长篇小说)词频统计. 用Hive对爬虫大作业产生的csv文件进行数据分析 1. 用Hive对爬虫大作业产 ...