[DM8168]Linux下SPI驱动测试
1、内核自带的SPI相关的驱动文件
项目中有CPU与FPGA进行通信,用到SPI接口:
SPI头文件在:
linux-kernel/include/linux/spi.h
SPI实现在:
linux-kernel/drivers/spi/spi.c omap2_mcspi.c spidev.c
DVS8168开发板在以下文件中初始化SPI:
linux-kernel/arch/arm/mach-omap2/board-ti8168evm.c
上述文件中有:
const struct flash_platform_data ti816x_spi_flash =
{
.type = "w25x32",
.name = "spi_flash",
.parts = ti816x_spi_partitions,
.nr_parts = ARRAY_SIZE(ti816x_spi_partitions),
}; struct spi_board_info __initdata ti816x_spi_slave_info[] =
{
{
.modalias = "m25p80",
.platform_data = &ti816x_spi_flash,
.irq = -,
.max_speed_hz = ,
.bus_num = ,
.chip_select = ,
},
}; static void __init ti816x_spi_init(void)
{
spi_register_board_info(ti816x_spi_slave_info,
ARRAY_SIZE(ti816x_spi_slave_info));
}
修改board-ti8168evm.c 初始化我们自己的SPI设备,如下:
// Dragon add
struct spi_board_info __initdata fpga_spi_slave_info[] = {
{
.modalias = "spidev",
.max_speed_hz = , // 48 Mbps
.bus_num = ,
.chip_select = ,
.mode = SPI_MODE_1,
},
}; // Dragon modified
static void __init ti816x_spi_init(void)
{
spi_register_board_info(fpga_spi_slave_info,
ARRAY_SIZE(fpga_spi_slave_info));
}
2、重新编译内核,同时选择生成spi设备驱动
$ make menuconfig CROSS_COMPILE=arm-none-linux-gnueabi- ARCH=arm
(1)Device drivers -> Memory tech... -> Self-contained --> 取消 support most spi Flash
影响:取消文件(/drivers/mtd/devices/mtd_m25p80.c)
(2)D-evice drivers --> SPI Support --> 勾选 Utilities & Mcspi driver & User mode SPI
影响:加入文件(/drivers/spi/spi_bitbang.c /drivers/spi/omap2_mcspi.c /drivers/spi/spidev.c)
linux-kenel/drivers/spidev.c 实现用户态spi设备驱动的功能
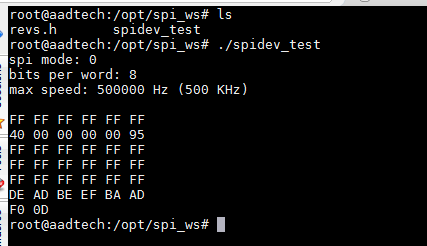
3、编译内核自带spi应用程序,验证SPI功能(注意MISO要与MOSI相连,以实现回环测试)如下:
linux-kenel\Documentation\spi\spidev_test.c
示波器截图,黄色为SCLK,蓝色为MOSI
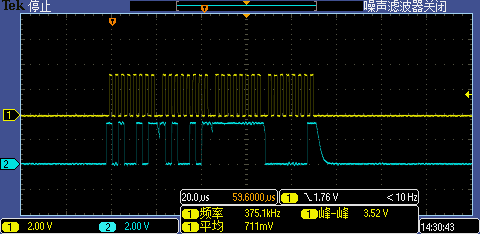
发送数据与接收数据相同,则说明SPI通信成功!
[DM8168]Linux下SPI驱动测试的更多相关文章
- RedHat Linux 下安装、测试摄像头
RedHat Linux 下安装.测试摄像头(全文见附件) 随着视频电话的迅速发展我相信大家一定有过在Windows 下安装摄像头的经历,然而大多数 都不支持Linux .我现以罗技摄像头为例 ...
- Linux 下wifi 驱动开发(四)—— USB接口WiFi驱动浅析
源: Linux 下wifi 驱动开发(四)—— USB接口WiFi驱动浅析
- 【驱动】linux下I2C驱动架构全面分析
I2C 概述 I2C是philips提出的外设总线. I2C只有两条线,一条串行数据线:SDA,一条是时钟线SCL ,使用SCL,SDA这两根信号线就实现了设备之间的数据交互,它方便了工程师的布线. ...
- linux下I2C驱动架构全面分析【转】
本文转载自:http://blog.csdn.net/wangpengqi/article/details/17711165 I2C 概述 I2C是philips提出的外设总线. I2C只有两条线,一 ...
- linux驱动基础系列--Linux下Spi接口Wifi驱动分析
前言 本文纯粹的纸上谈兵,我并未在实际开发过程中遇到需要编写或调试这类驱动的时候,本文仅仅是根据源码分析后的记录!基于内核版本:2.6.35.6 .主要是想对spi接口的wifi驱动框架有一个整体的把 ...
- Am335x SPI 驱动测试
内核版本:3.14.65 CPU:Am335x 1.编译内核: make menuconfig Device Drivers -> <*>SPI support -> < ...
- Linux 下wifi 驱动开发(三)—— SDIO接口WiFi驱动浅析
SDIO-Wifi模块是基于SDIO接口的符合wifi无线网络标准的嵌入式模块,内置无线网络协议IEEE802.11协议栈以及TCP/IP协议栈.可以实现用户主平台数据通过SDIO口到无线网络之间的转 ...
- Linux下GPIO驱动
编写驱动程序,首先要了解是什么类型的设备.linux下的设备分为三类,分别为:字符设备,块设备和网络设备.字符设备类型是根据是否以字符流为数据的交换方式,大部分设备都是字符设备,如键盘,串口等,块设备 ...
- linux 下网站压力测试工具webbench
一直在用webbench ,这个linux下的网站压力测试工具.整理下. 笔记本装的ubuntu,其他linux系统也差不多. webbench 需要先安装 ctags,一个vim的阅读插件,可以直接 ...
随机推荐
- Miller rabin
蛤蛤,终于基本上搞懂了 #include<iostream> #include<cstdio> using namespace std; long long num[10]={ ...
- 【洛谷P1379】八数码难题(广搜、A*)
八数码难题 题目描述 一.广搜: 首先要考虑用什么存每一个状态 显然每个状态都用一个矩阵存是很麻烦的. 我们可以考虑将一个3*3的矩阵用一个字符串或long long 存. 每次扩展时再转化为矩阵. ...
- malloc动态分配字符串数组“ 一个月内的提醒”
//输出一个月提醒 #include <stdio.h> #include <stdlib.h> #include <string.h> #define MAX_R ...
- vue项目不能同时被localhost和ip地址同时访问的方法
方法1.将index.js中的host的值改为‘0.0.0.0’ 方法2.修改package.json中script下dev的值,在后面加入--host 0.0.0.0 也可以解决
- NPM 学习笔记整理
NPM 学习笔记整理 阅读 550,2017年06月04日 发布,来源:blog.ihoey.com 什么是 NPM npm 之于 Node ,就像 pip 之于 Python , gem 之于 Ru ...
- winrar压缩工具
WinRAR使用心得 免广告 英文版可以设置广告关闭,地址: https://www.win-rar.com/predownload.html?&Version=64bit 把WinRAR默认 ...
- 【整理】PHP获取客户端真实IP地址详解
php获取客户端IP地址有四种方法,这五种方法分别为REMOTE_ADDR.HTTP_CLIENT_IP.HTTP_X_FORWARDED_FOR.HTTP_VIA. REMOTE_ADDR 是你的客 ...
- HDU 3364 高斯消元
Lanterns Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/65536 K (Java/Others)Total Su ...
- Git Pro Book
目录 2nd Edition (2014) Switch to 1st Edition Download Ebook The entire Pro Git book, written by Scott ...
- python基础之流程控制、数字和字符串处理
流程控制 条件判断 if单分支:当一个“条件”成立时执行相应的操作. 语法结构: if 条件: command 流程图: 示例:如果3大于2,那么输出字符串"very good" ...