OpenCV4之特征提取与对象检测
1、图像特征概述
图像特征的定义与表示
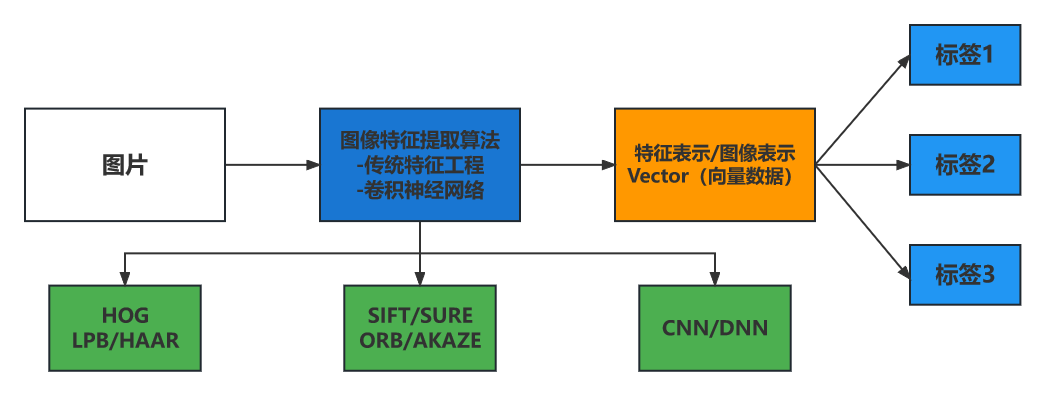
图像特征表示是该图像唯一的表述,是图像的DNA
图像特征提取概述
- 传统图像特征提取 - 主要基于纹理、角点、颜色分布、梯度、边缘等
- 深度卷积神经网络特征提取 - 基于监督学习、自动提取特征
- 特征数据/特征属性
- 尺度空间不变性
- 像素迁移不变性
- 光照一致性原则
- 旋转不变性原则

图像特征应用
图像分类、对象识别、特征检测、图像对齐/匹配、对象检测、图像搜索/比对
- 图像处理:从图像到图像
- 特征提取:从图像到向量(数据)
2、角点检测
什么是角点

各个方向的梯度变化
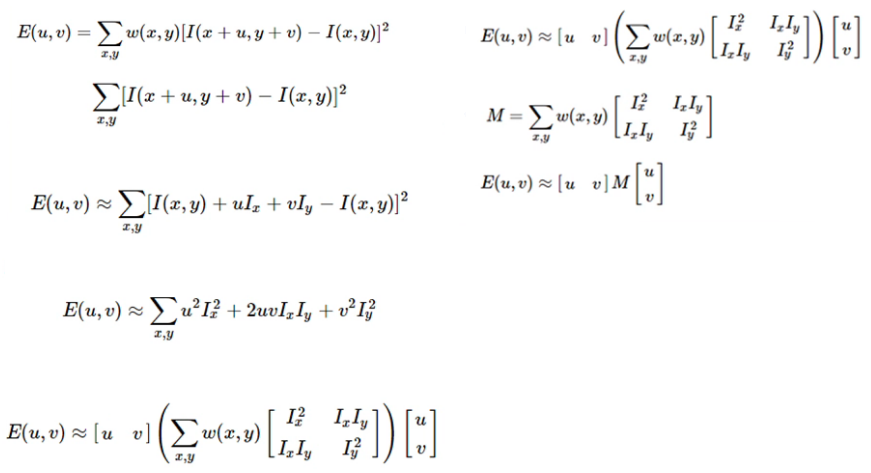
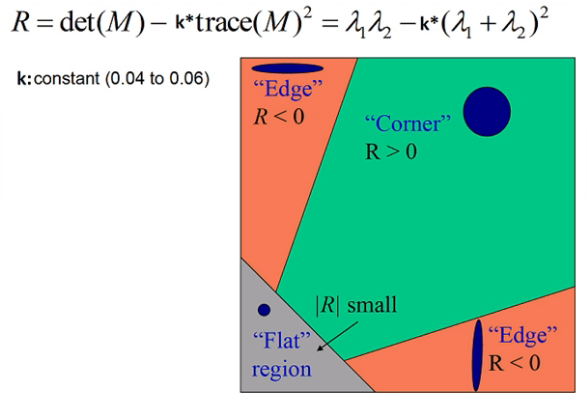
Harris角点检测算法
//函数说明:
void cv::cornerHarris(
InputArray src, //输入
OutputArray dst, //输出
int blockSize, //块大小
int ksize, //Sobel
double k, //常量系数
int borderType = BORDER_DEFAULT //
)
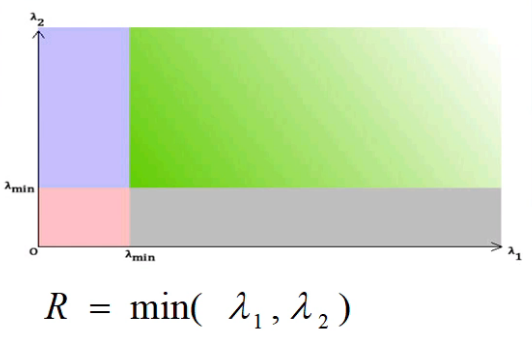
Shi-tomas角点检测算法
//函数说明:
void cv::goodFeaturesToTrack(
InputArray image, //输入图像
OutputArray corners, //输出的角点坐标
int maxCorners, //最大角点数目
double qualityLevel, //质量控制,即λ1与λ2的最小阈值
double minDistance, //重叠控制,忽略多少像素值范围内重叠的角点
InputArray mask = noArray(),
int blockSize = 3,
bool useHarrisDetector = false,
double k = 0.04
)
代码实现
#include <opencv2/opencv.hpp>
#include <iostream> using namespace cv;
using namespace std; int main(int argc, char** argv) { Mat src = imread("D:/images/building.png");
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
namedWindow("src", WINDOW_FREERATIO);
imshow("src", src); RNG rng(12345);
vector<Point> points;
goodFeaturesToTrack(gray, points, 400, 0.05, 10);
for (size_t t = 0; t < points.size(); t++) {
circle(src, points[t], 3, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 1.5, LINE_AA);
} namedWindow("out", WINDOW_FREERATIO);
imshow("out", src); waitKey(0);
destroyAllWindows(); return 0;
}
效果:

3、关键点检测
- 图像特征点/关键点
- 关键点检测函数
- 代码演示
ORB关键点检测(快速)
ORB算法由两个部分组成:快速关键点定位+BRIEF描述子生成
Fast关键点检测:选择当前像素点P,阈值T,周围16个像素点,超过连续N=12个像素点大于或者小于P,Fast1:优先检测1、5、9、13,循环所有像素点

关键点检测函数
//ORB对象创建
Orb = cv::ORB::create(500)
virtual void cv::Feature2D::detect(
InputArray image, //输入图像
std::vector<KeyPoint>& keypoints, //关键点
InputArray mask = noArray() //支持mask
)
KeyPoint数据结构-四个最重要属性:
- pt
- angle
- response
- size
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("D:/images/building.png");
imshow("input", src);
//Mat gray;
//cvtColor(src, gray, COLOR_BGR2GRAY);
auto orb = ORB::create(500);
vector<KeyPoint> kypts;
orb->detect(src, kypts);
Mat result01, result02, result03;
drawKeypoints(src, kypts, result01, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
drawKeypoints(src, kypts, result02, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
imshow("ORB关键点检测default", result01);
imshow("ORB关键点检测rich", result02);
waitKey(0);
destroyAllWindows();
return 0;
}
效果:

4、特征描述子
- 基于关键点周围区域
- 浮点数表示与二值编码
- 描述子长度

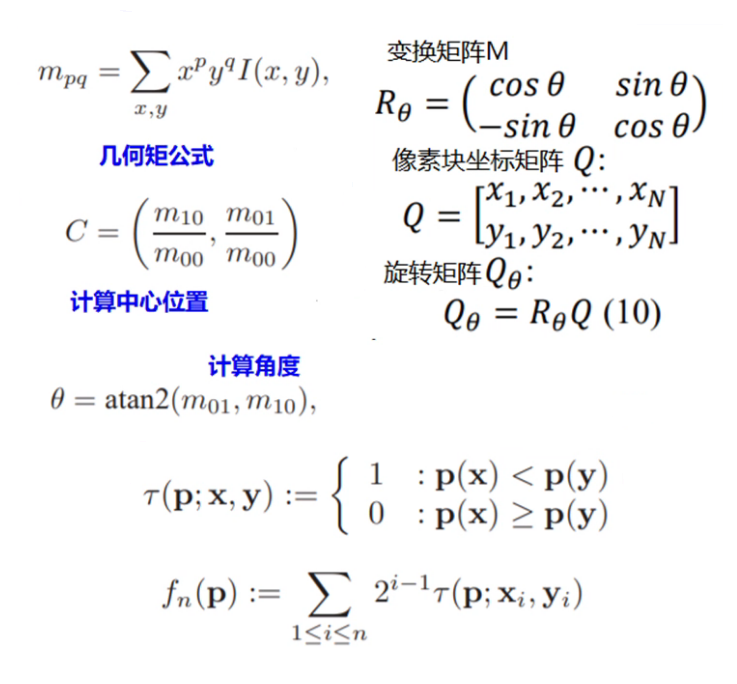
ORB特征描述子生成步骤:
- 提取特征关键点
- 描述子方向指派
- 特征描述子编码(二值编码32位)
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("D:/images/building.png");
imshow("input", src);
//Mat gray;
//cvtColor(src, gray, COLOR_BGR2GRAY);
auto orb = ORB::create(500); //获取500个关键点,每个关键点计算一个orb特征描述子
vector<KeyPoint> kypts;
orb->detect(src, kypts);
Mat result01, result02, result03;
//drawKeypoints(src, kypts, result01, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
//不同半径代表不同层级高斯金字塔中的关键点,即图像不同尺度中的关键点
drawKeypoints(src, kypts, result02, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
Mat desc_orb;
orb->compute(src, kypts, desc_orb);
std::cout << desc_orb.rows << " x " << desc_orb.cols << std::endl;
//imshow("ORB关键点检测default", result01);
imshow("ORB关键点检测rich", result02);
waitKey(0);
destroyAllWindows();
return 0;
}
效果:

SIFT(尺度不变特征转换,Scale-invariant feature transform)特征描述子
- 尺度空间不变性
- 像素迁移不变性
- 角度旋转不变性
SIFT特征提取步骤
- 尺度空间极值检测
- 关键点定位
- 方向指派
- 特征描述子
尺度空间极值检测
- 构建尺度空间 -- 图像金字塔 + 高斯尺度空间
- 三层空间中的极值查找

关键点定位
- 极值点定位 - 求导拟合
- 删除低对比度与低响应候选点

方向指派
- 关键点方向指派
- Scale尺度最近的图像,1.5倍大小的高斯窗口
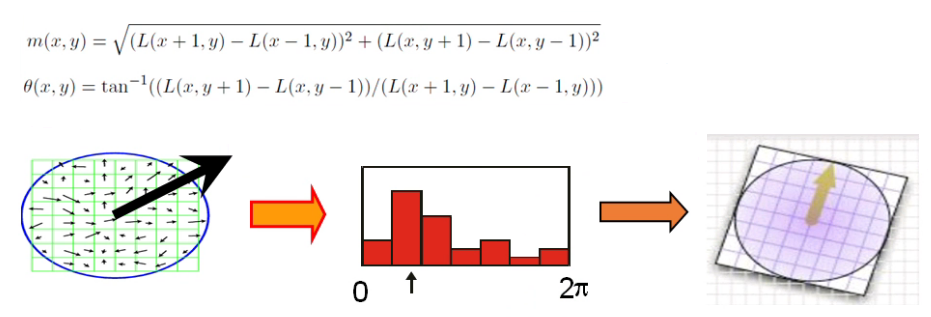
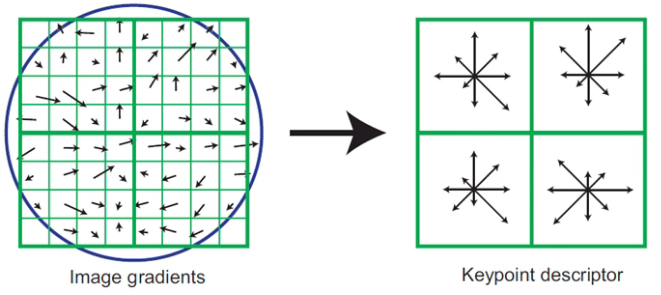
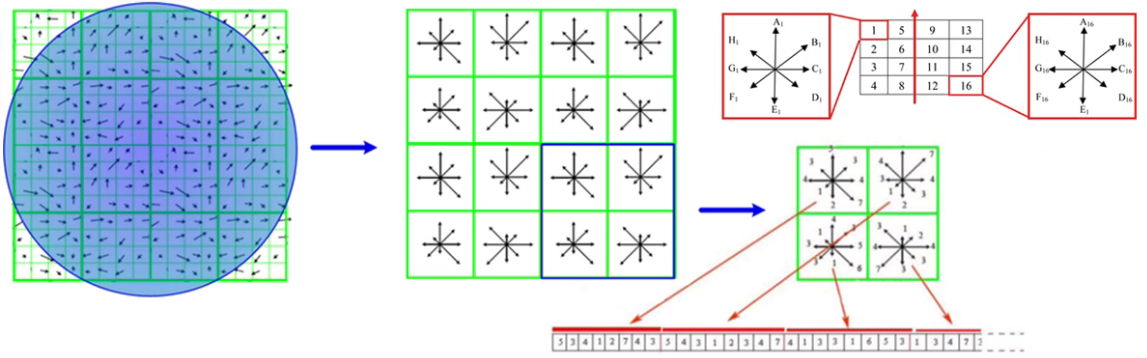
特征描述子
- 128维向量/特征描述子
- 描述子编码方式
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("D:/images/building.png");
imshow("input", src);
//Mat gray;
//cvtColor(src, gray, COLOR_BGR2GRAY);
auto sift = SIFT::create(500);
vector<KeyPoint> kypts;
sift->detect(src, kypts);
Mat result01, result02, result03;
//drawKeypoints(src, kypts, result01, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
drawKeypoints(src, kypts, result02, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
std::cout << kypts.size() << std::endl;
for (int i = 0; i < kypts.size(); i++) {
std::cout << "pt: " << kypts[i].pt << " angle: " << kypts[i].angle << " size: " << kypts[i].size << std::endl;
}
Mat desc_orb;
sift->compute(src, kypts, desc_orb);
std::cout << desc_orb.rows << " x " << desc_orb.cols << std::endl;
//imshow("ORB关键点检测default", result01);
imshow("ORB关键点检测rich", result02);
waitKey(0);
destroyAllWindows();
return 0;
}
效果:

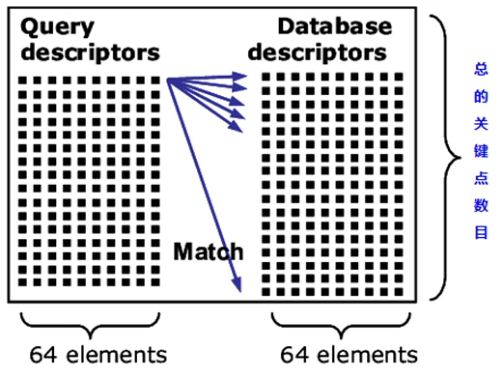
5、特征匹配
- 特征匹配算法
- 特征匹配函数
- 特征匹配方法对比
特征匹配算法
暴力匹配,全局搜索,计算最小距离,返回相似描述子合集
FLANN匹配,2009年发布的开源高维数据匹配算法库,全称Fast Library for Approximate Nearest Neighbors
支持KMeans、KDTree、KNN、多探针LSH等搜索与匹配算法
| 描述子 | 匹配方法 |
|---|---|
| SIFT, SURF, and KAZE | L1 Norm |
| AKAZE, ORB, and BRISK | Hamming distance(二值编码) |
// 暴力匹配
auto bfMatcher = BFMatcher::create(NORM_HAMMING, false);
std::vector<DMatch> matches;
bfMatcher->match(box_descriptors, scene_descriptors, matches);
Mat img_orb_matches;
drawMatches(box, box_kpts, box_in_scene, scene_kpts, matches, img_orb_matches);
imshow("ORB暴力匹配演示", img_orb_matches);
// FLANN匹配
auto flannMatcher = FlannBasedMatcher(new flann::LshIndexParams(6, 12, 2));
flannMatcher.match(box_descriptors, scene_descriptors, matches);
Mat img_flann_matches;
drawMatches(box, box_kpts, box_in_scene, scene_kpts, matches, img_flann_matches);
namedWindow("FLANN匹配演示", WINDOW_FREERATIO);
imshow("FLANN匹配演示", img_flann_matches);
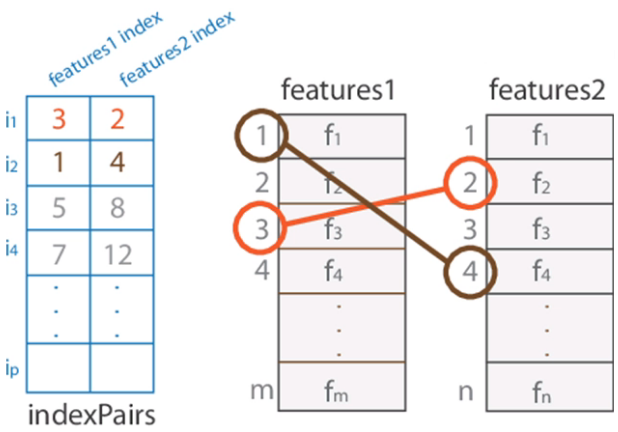
特征匹配DMatch数据结构
DMatch数据结构:
- queryIdx
- trainIdx
- distance
distance表示距离,值越小表示匹配程度越高。
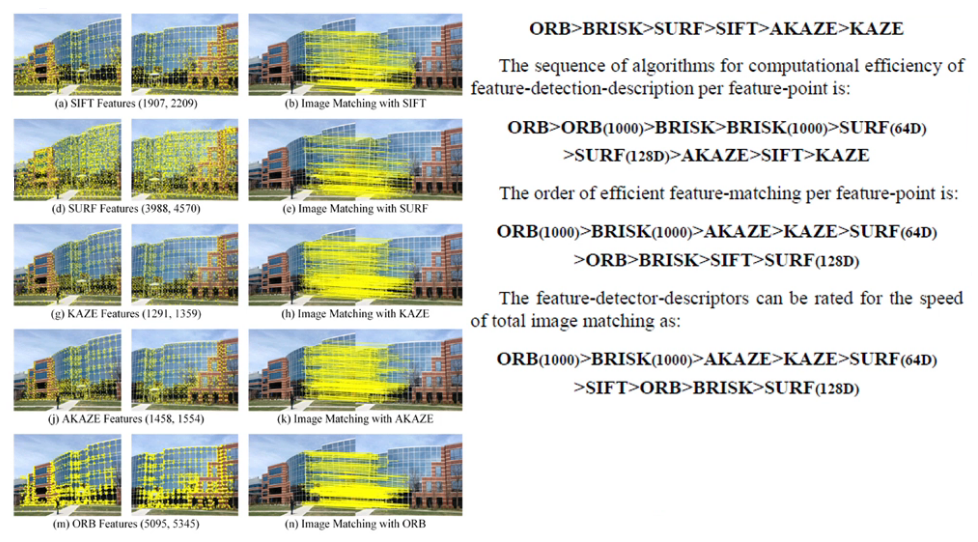
OpenCV特征匹配方法对比
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat book = imread("D:/images/book.jpg");
Mat book_on_desk = imread("D:/images/book_on_desk.jpg");
imshow("book", book);
//Mat gray;
//cvtColor(src, gray, COLOR_BGR2GRAY);
vector<KeyPoint> kypts_book;
vector<KeyPoint> kypts_book_on_desk;
Mat desc_book, desc_book_on_desk;
//auto orb = ORB::create(500);
//orb->detectAndCompute(book, Mat(), kypts_book, desc_book);
//orb->detectAndCompute(book_on_desk, Mat(), kypts_book_on_desk, desc_book_on_desk);
auto sift = SIFT::create(500);
sift->detectAndCompute(book, Mat(), kypts_book, desc_book);
sift->detectAndCompute(book_on_desk, Mat(), kypts_book_on_desk, desc_book_on_desk);
Mat result;
vector<DMatch> matches;
//// 暴力匹配
//auto bf_matcher = BFMatcher::create(NORM_HAMMING, false);
//bf_matcher->match(desc_book, desc_book_on_desk, matches);
//drawMatches(book, kypts_book, book_on_desk, kypts_book_on_desk, matches, result);
// FLANN匹配
//auto flannMatcher = FlannBasedMatcher(new flann::LshIndexParams(6, 12, 2));
auto flannMatcher = FlannBasedMatcher();
flannMatcher.match(desc_book, desc_book_on_desk, matches);
Mat img_flann_matches;
drawMatches(book, kypts_book, book_on_desk, kypts_book_on_desk, matches, img_flann_matches);
namedWindow("SIFT-FLANN匹配演示", WINDOW_FREERATIO);
imshow("SIFT-FLANN匹配演示", img_flann_matches);
//namedWindow("ORB暴力匹配演示", WINDOW_FREERATIO);
//imshow("ORB暴力匹配演示", result);
waitKey(0);
destroyAllWindows();
return 0;
}
效果:
1、ORB描述子匹配效果
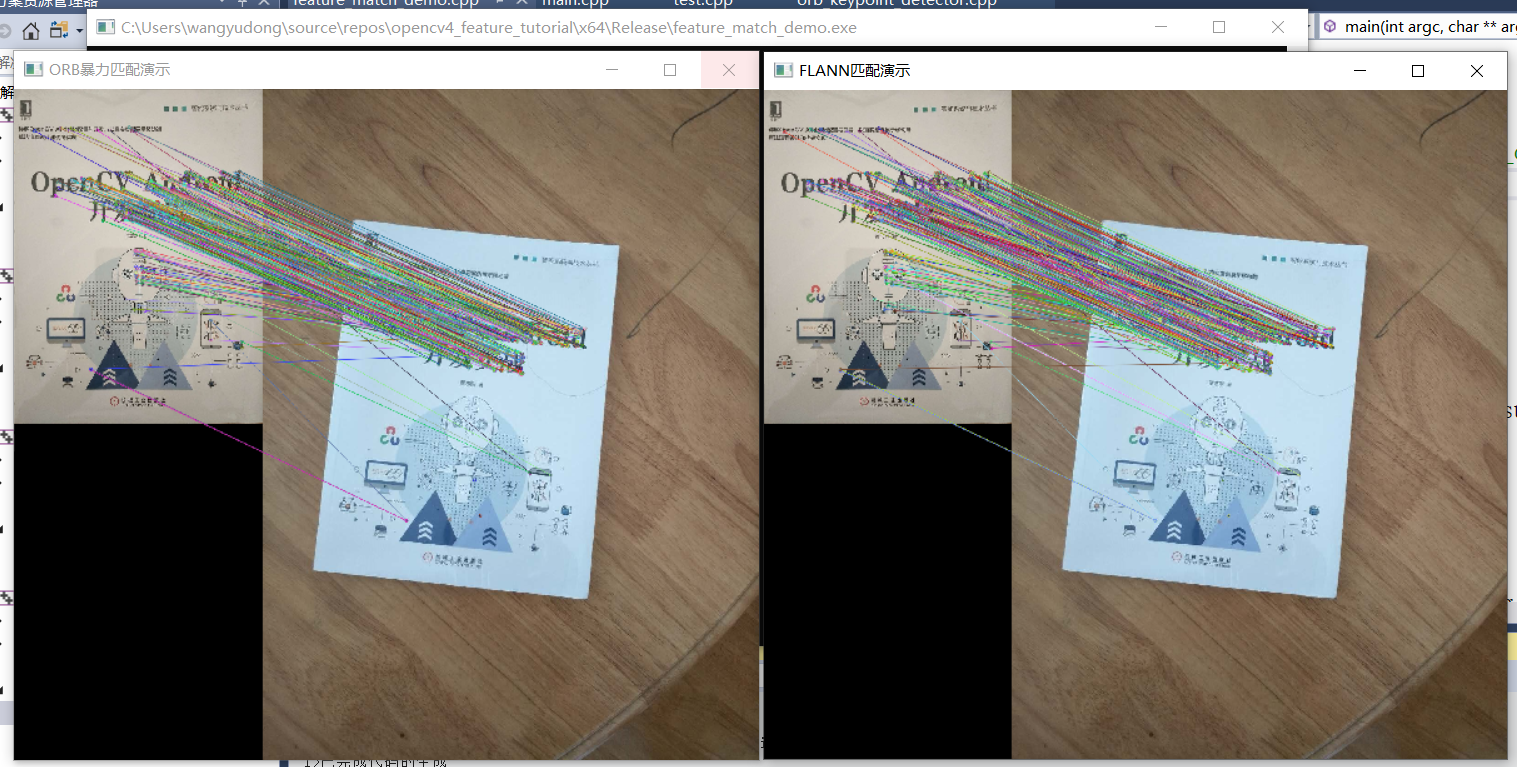
2、SIFT描述子匹配效果
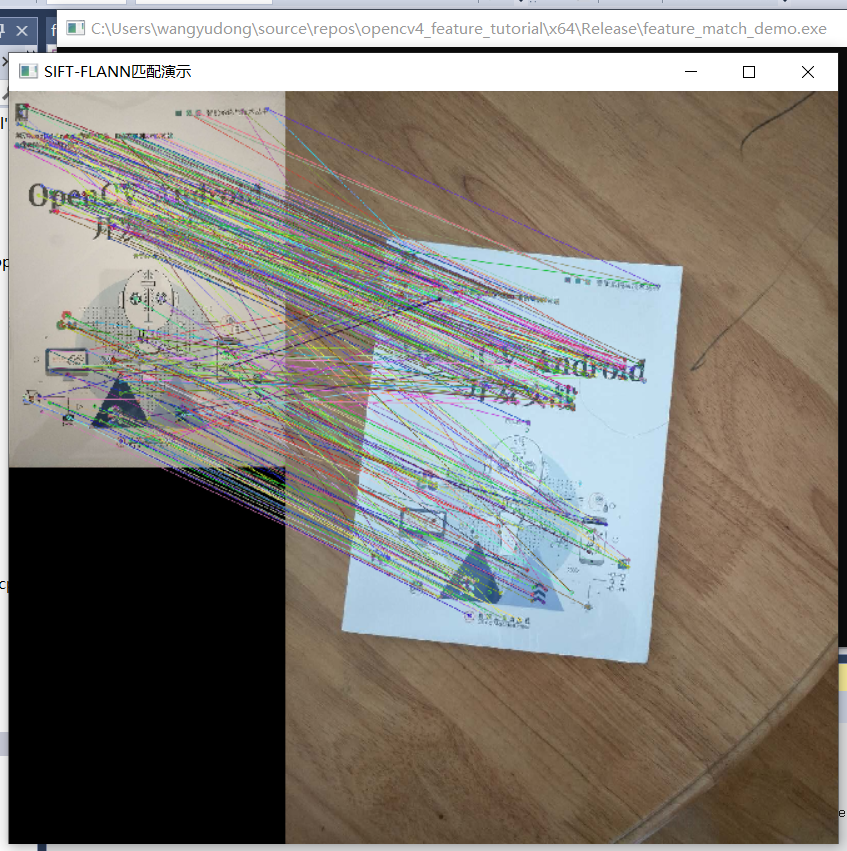
6、单应性变换/透视变换
Mat cv::findHomography(
InputArray srcPoints, // 输入
InputArray dstPoints, // 输出
int method = 0,
double ransacReprojThreshold = 3,
OuputArray mask = noArray(),
const int maxIters = 2000,
const double confidence = 0.995
)

拟合方法:
- 最小二乘法(0)
- 随机采样一致性(RANSC)
- 渐进采样一致性(RHO)
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
Mat input = imread("D:/images/book_on_desk.jpg");
Mat gray, binary;
cvtColor(input, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
vector<vector<Point>> contours;
vector<Vec4i> hierachy;
findContours(binary, contours, hierachy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
int index = 0;
for (size_t i = 0; i < contours.size(); i++) {
if (contourArea(contours[i]) > contourArea(contours[index])) {
index = i;
}
}
Mat approxCurve;
approxPolyDP(contours[index], approxCurve, contours[index].size() / 10, true);
//imshow("approx", approxCurve);
//std::cout << contours.size() << std::endl;
vector<Point2f> srcPts;
vector<Point2f> dstPts;
for (int i = 0; i < approxCurve.rows; i++) {
Vec2i pt = approxCurve.at<Vec2i>(i, 0);
srcPts.push_back(Point(pt[0], pt[1]));
circle(input, Point(pt[0], pt[1]), 12, Scalar(0, 0, 255), 2, 8, 0);
putText(input, std::to_string(i), Point(pt[0], pt[1]), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 0, 0), 1);
}
dstPts.push_back(Point2f(0, 0));
dstPts.push_back(Point2f(0, 760));
dstPts.push_back(Point2f(585, 760));
dstPts.push_back(Point2f(585, 0));
Mat h = findHomography(srcPts, dstPts, RANSAC); //计算单应性矩阵
Mat result;
warpPerspective(input, result, h, Size(585, 760)); //对原图进行透视变换获得校正后的目标区域
namedWindow("result", WINDOW_FREERATIO);
imshow("result", result);
drawContours(input, contours, index, Scalar(0, 255, 0), 2, 8);
namedWindow("轮廓", WINDOW_FREERATIO);
imshow("轮廓", input);
waitKey(0);
return 0;
}
效果:
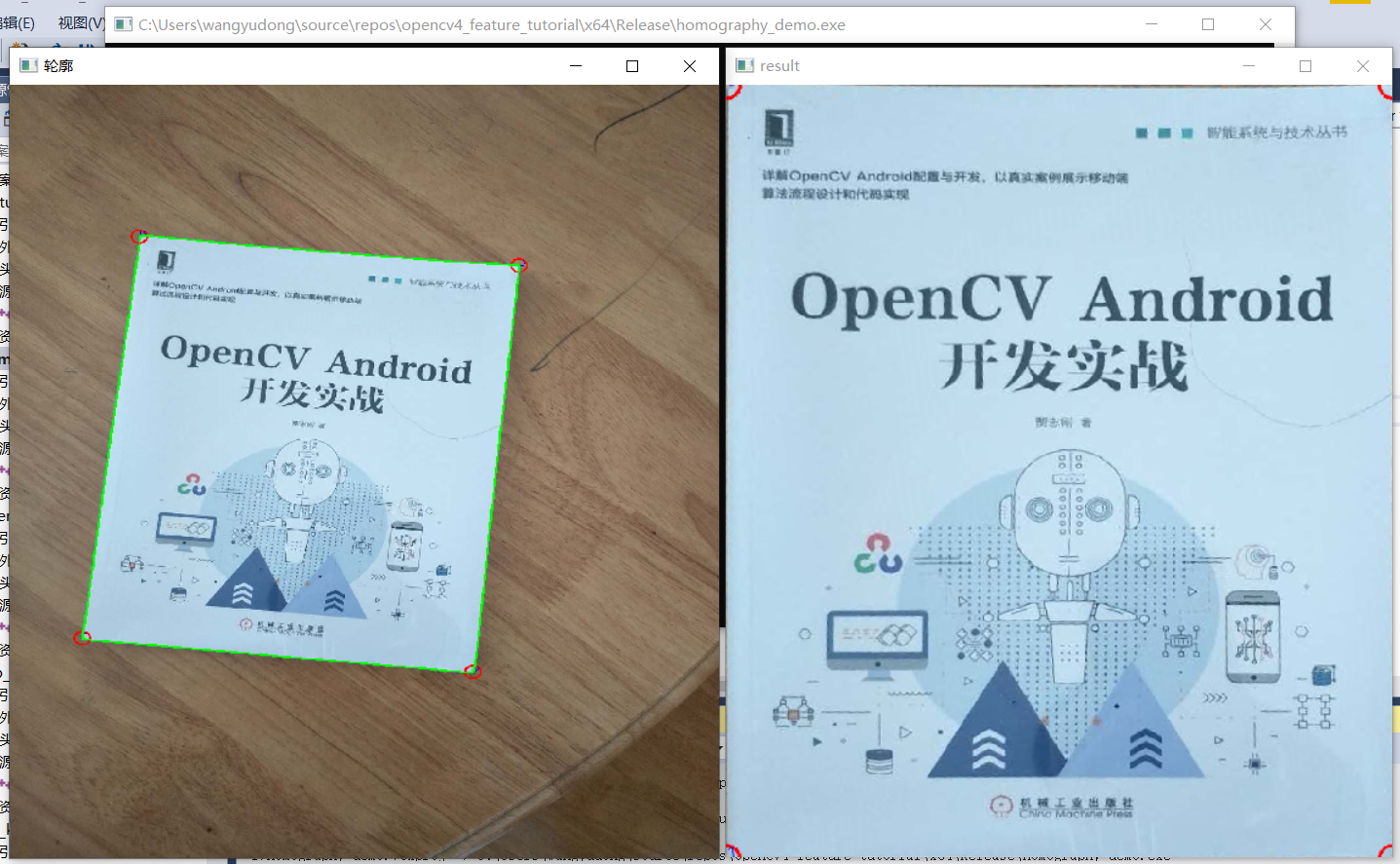
7、基于匹配的对象检测

- 基于特征的匹配与对象检测
- ORB/AKAZE/SIFT
- 暴力/FLANN
- 透视变换
- 检测框
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
// Mat image = imread("D:/images/butterfly.jpg");
Mat book = imread("D:/images/book.jpg");
Mat book_on_desk = imread("D:/images/book_on_desk.jpg");
namedWindow("book", WINDOW_FREERATIO);
imshow("book", book);
auto orb = ORB::create(500);
vector<KeyPoint> kypts_book;
vector<KeyPoint> kypts_book_on_desk;
Mat desc_book, desc_book_on_desk;
orb->detectAndCompute(book, Mat(), kypts_book, desc_book);
orb->detectAndCompute(book_on_desk, Mat(), kypts_book_on_desk, desc_book_on_desk);
Mat result;
auto bf_matcher = BFMatcher::create(NORM_HAMMING, false);
vector<DMatch> matches;
bf_matcher->match(desc_book, desc_book_on_desk, matches);
float good_rate = 0.15f;
int num_good_matches = matches.size() * good_rate;
std::cout << num_good_matches << std::endl;
std::sort(matches.begin(), matches.end());
matches.erase(matches.begin() + num_good_matches, matches.end());
drawMatches(book, kypts_book, book_on_desk, kypts_book_on_desk, matches, result);
vector<Point2f> obj_pts;
vector<Point2f> scene_pts;
for (size_t t = 0; t < matches.size(); t++) {
obj_pts.push_back(kypts_book[matches[t].queryIdx].pt);
scene_pts.push_back(kypts_book_on_desk[matches[t].trainIdx].pt);
}
Mat h = findHomography(obj_pts, scene_pts, RANSAC); // 计算单应性矩阵h
vector<Point2f> srcPts;
srcPts.push_back(Point2f(0, 0));
srcPts.push_back(Point2f(book.cols, 0));
srcPts.push_back(Point2f(book.cols, book.rows));
srcPts.push_back(Point2f(0, book.rows));
std::vector<Point2f> dstPts(4);
perspectiveTransform(srcPts, dstPts, h); // 计算转换后书的四个顶点
for (int i = 0; i < 4; i++) {
line(book_on_desk, dstPts[i], dstPts[(i + 1) % 4], Scalar(0, 0, 255), 2, 8, 0);
}
namedWindow("暴力匹配", WINDOW_FREERATIO);
imshow("暴力匹配", result);
namedWindow("对象检测", WINDOW_FREERATIO);
imshow("对象检测", book_on_desk);
//imwrite("D:/object_find.png", book_on_desk);
waitKey(0);
return 0;
}
效果:

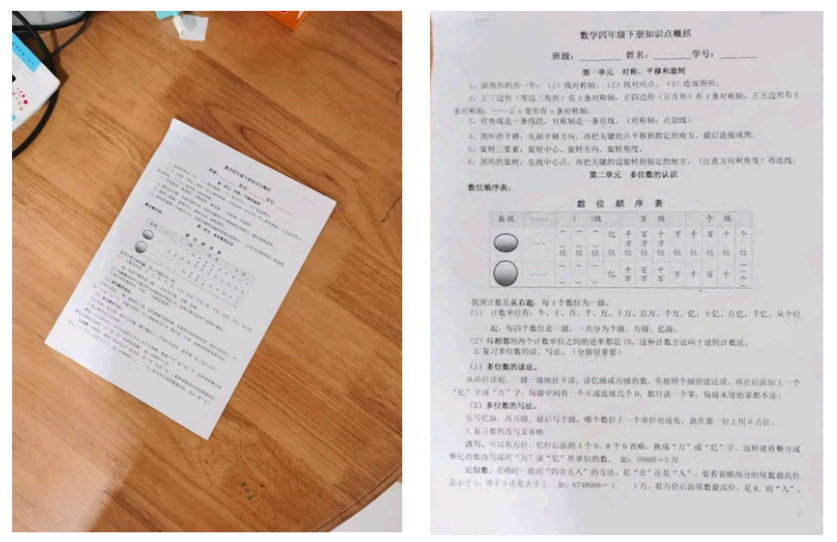
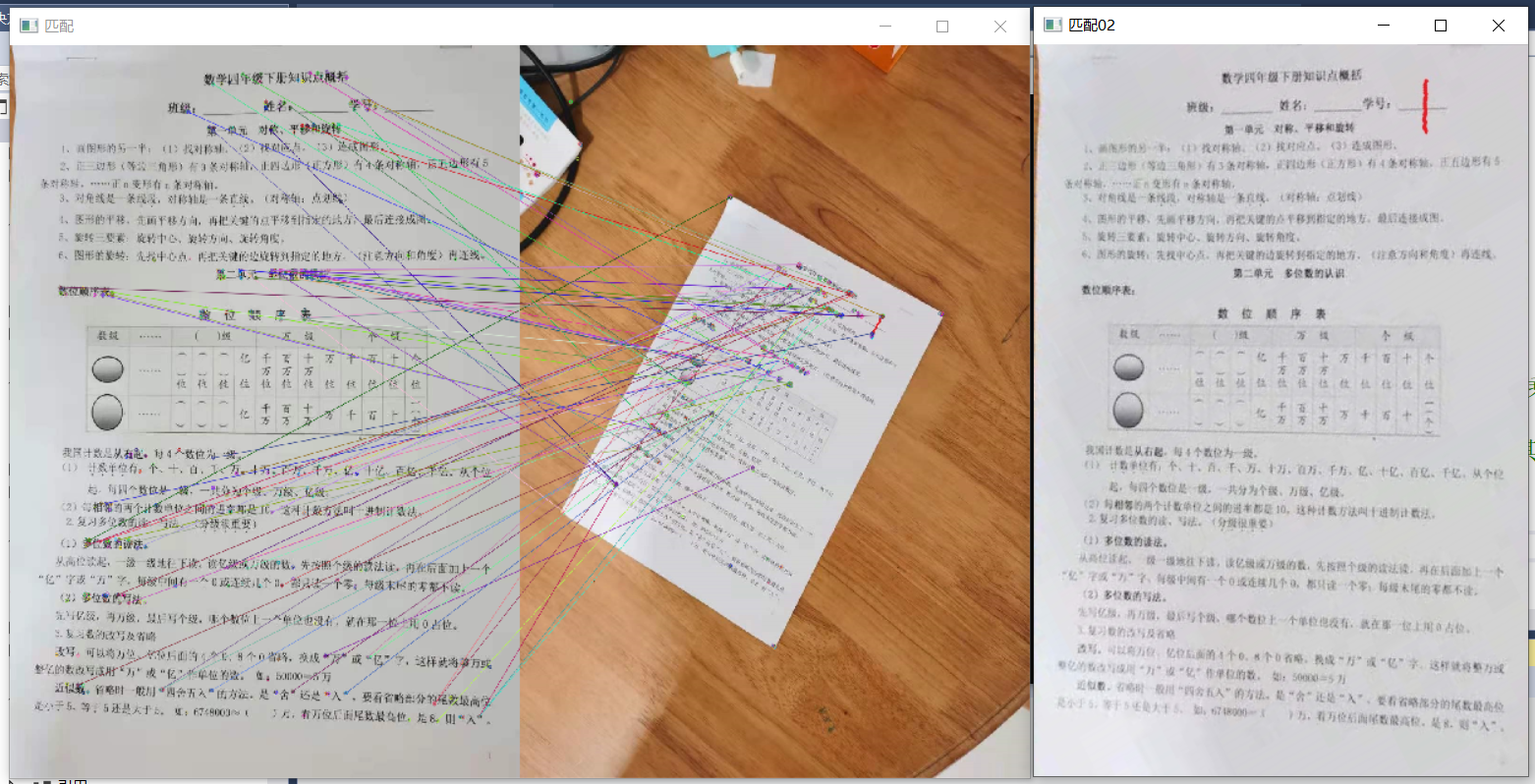
8、文档对齐
- 模板表单/文档
- 特征匹配与对齐
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat ref_img = imread("D:/images/form.png");
Mat img = imread("D:/images/form_in_doc.jpg");
imshow("表单模板", ref_img);
auto orb = ORB::create(500);
vector<KeyPoint> kypts_ref;
vector<KeyPoint> kypts_img;
Mat desc_book, desc_book_on_desk;
orb->detectAndCompute(ref_img, Mat(), kypts_ref, desc_book);
orb->detectAndCompute(img, Mat(), kypts_img, desc_book_on_desk);
Mat result;
auto bf_matcher = BFMatcher::create(NORM_HAMMING, false);
vector<DMatch> matches;
bf_matcher->match(desc_book_on_desk, desc_book, matches);
float good_rate = 0.15f;
int num_good_matches = matches.size() * good_rate;
std::cout << num_good_matches << std::endl;
std::sort(matches.begin(), matches.end());
matches.erase(matches.begin() + num_good_matches, matches.end());
drawMatches(ref_img, kypts_ref, img, kypts_img, matches, result);
imshow("匹配", result);
imwrite("D:/images/result_doc.png", result);
// Extract location of good matches
std::vector<Point2f> points1, points2;
for (size_t i = 0; i < matches.size(); i++)
{
points1.push_back(kypts_img[matches[i].queryIdx].pt);
points2.push_back(kypts_ref[matches[i].trainIdx].pt);
}
Mat h = findHomography(points1, points2, RANSAC); // 尽量用RANSAC,比最小二乘法效果好一些
Mat aligned_doc;
warpPerspective(img, aligned_doc, h, ref_img.size()); // 单应性矩阵h决定了其他无效区域不会被变换,只会变换target区域
imwrite("D:/images/aligned_doc.png", aligned_doc);
waitKey(0);
destroyAllWindows();
return 0;
}
效果:
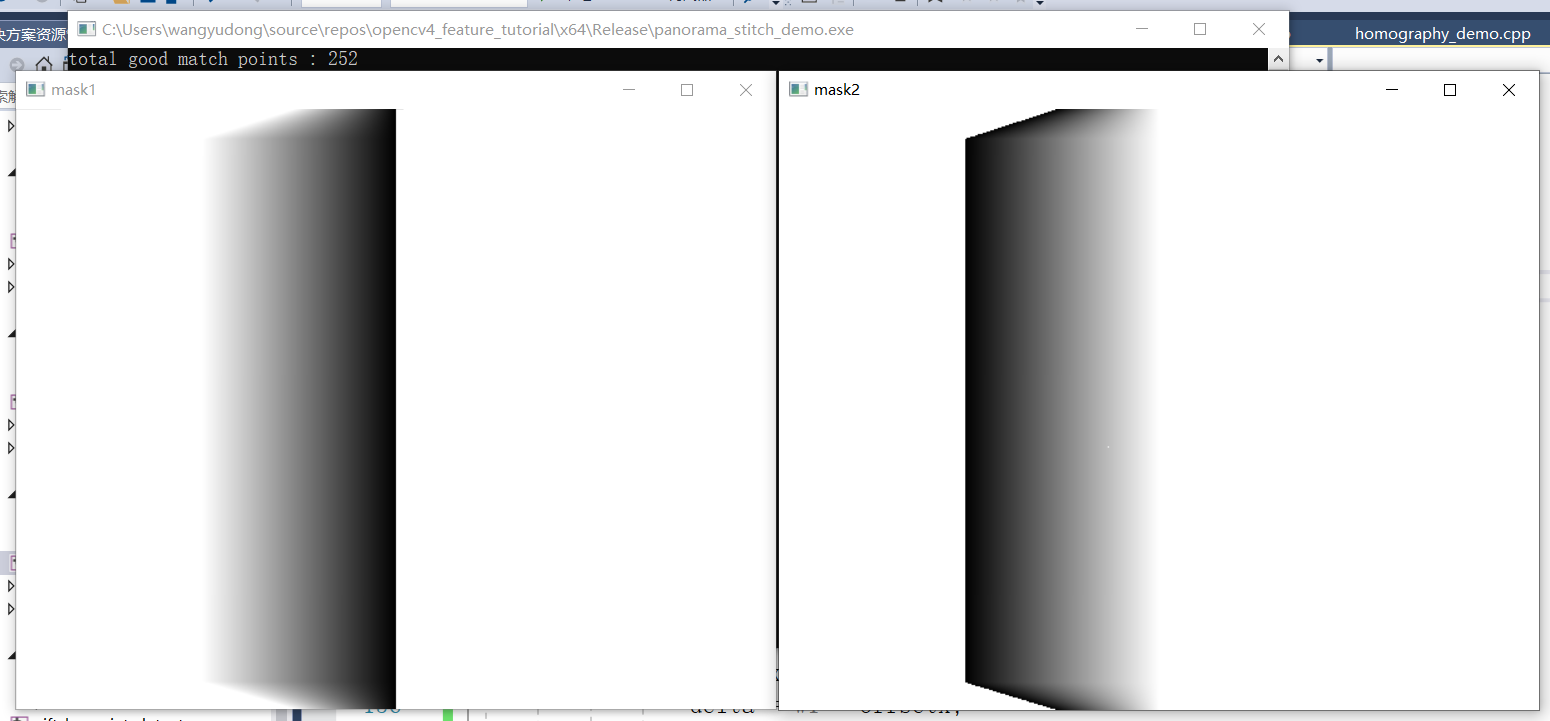
9、图像拼接
- 特征检测与匹配
- 图像对齐与变换
- 图像边缘融合
代码实现:
#include <opencv2/opencv.hpp>
#include <iostream>
#define RATIO 0.8
using namespace std;
using namespace cv;
void linspace(Mat& image, float begin, float finish, int number, Mat &mask);
void generate_mask(Mat &img, Mat &mask);
int main(int argc, char** argv) {
Mat left = imread("D:/images/q11.jpg");
Mat right = imread("D:/images/q22.jpg");
if (left.empty() || right.empty()) {
printf("could not load image...\n");
return -1;
}
// 提取特征点与描述子
vector<KeyPoint> keypoints_right, keypoints_left;
Mat descriptors_right, descriptors_left;
auto detector = AKAZE::create();
detector->detectAndCompute(left, Mat(), keypoints_left, descriptors_left);
detector->detectAndCompute(right, Mat(), keypoints_right, descriptors_right);
// 暴力匹配
vector<DMatch> matches;
auto matcher = DescriptorMatcher::create(DescriptorMatcher::BRUTEFORCE);
// 发现匹配
std::vector< std::vector<DMatch> > knn_matches;
matcher->knnMatch(descriptors_left, descriptors_right, knn_matches, 2);
const float ratio_thresh = 0.7f;
std::vector<DMatch> good_matches;
for (size_t i = 0; i < knn_matches.size(); i++)
{
if (knn_matches[i][0].distance < ratio_thresh * knn_matches[i][1].distance)
{
good_matches.push_back(knn_matches[i][0]);
}
}
printf("total good match points : %d\n", good_matches.size());
std::cout << std::endl;
Mat dst;
drawMatches(left, keypoints_left, right, keypoints_right, good_matches, dst);
imshow("output", dst);
imwrite("D:/images/good_matches.png", dst);
//-- Localize the object
std::vector<Point2f> left_pts;
std::vector<Point2f> right_pts;
for (size_t i = 0; i < good_matches.size(); i++)
{
// 收集所有好的匹配点
left_pts.push_back(keypoints_left[good_matches[i].queryIdx].pt);
right_pts.push_back(keypoints_right[good_matches[i].trainIdx].pt);
}
// 配准与对齐,对齐到第一张
Mat H = findHomography(right_pts, left_pts, RANSAC);
// 获取全景图大小
int h = max(left.rows, right.rows);
int w = left.cols + right.cols;
Mat panorama_01 = Mat::zeros(Size(w, h), CV_8UC3);
Rect roi;
roi.x = 0;
roi.y = 0;
roi.width = left.cols;
roi.height = left.rows;
// 获取左侧与右侧对齐图像
left.copyTo(panorama_01(roi));
imwrite("D:/images/panorama_01.png", panorama_01);
Mat panorama_02;
warpPerspective(right, panorama_02, H, Size(w, h));
imwrite("D:/images/panorama_02.png", panorama_02);
// 计算融合重叠区域mask
Mat mask = Mat::zeros(Size(w, h), CV_8UC1);
generate_mask(panorama_02, mask);
// 创建遮罩层并根据mask完成权重初始化
Mat mask1 = Mat::ones(Size(w, h), CV_32FC1);
Mat mask2 = Mat::ones(Size(w, h), CV_32FC1);
// left mask
linspace(mask1, 1, 0, left.cols, mask);
// right mask
linspace(mask2, 0, 1, left.cols, mask);
namedWindow("mask1", WINDOW_FREERATIO);
imshow("mask1", mask1);
namedWindow("mask2", WINDOW_FREERATIO);
imshow("mask2", mask2);
// 左侧融合
Mat m1;
vector<Mat> mv;
mv.push_back(mask1);
mv.push_back(mask1);
mv.push_back(mask1);
merge(mv, m1);
panorama_01.convertTo(panorama_01, CV_32F);
multiply(panorama_01, m1, panorama_01);
// 右侧融合
mv.clear();
mv.push_back(mask2);
mv.push_back(mask2);
mv.push_back(mask2);
Mat m2;
merge(mv, m2);
panorama_02.convertTo(panorama_02, CV_32F);
multiply(panorama_02, m2, panorama_02);
// 合并全景图
Mat panorama;
add(panorama_01, panorama_02, panorama);
panorama.convertTo(panorama, CV_8U);
imwrite("D:/images/panorama.png", panorama);
waitKey(0);
return 0;
}
void generate_mask(Mat &img, Mat &mask) {
int w = img.cols;
int h = img.rows;
for (int row = 0; row < h; row++) {
for (int col = 0; col < w; col++) {
Vec3b p = img.at<Vec3b>(row, col);
int b = p[0];
int g = p[1];
int r = p[2];
if (b == g && g == r && r == 0) {
mask.at<uchar>(row, col) = 255;
}
}
}
imwrite("D:/images/mask.png", mask);
}
// 对mask中的0区域,进行逐行计算每个像素的权重值
void linspace(Mat& image, float begin, float finish, int w1, Mat &mask) {
int offsetx = 0;
float interval = 0;
float delta = 0;
for (int i = 0; i < image.rows; i++) {
offsetx = 0;
interval = 0;
delta = 0;
for (int j = 0; j < image.cols; j++) {
int pv = mask.at<uchar>(i, j);
if (pv == 0 && offsetx == 0) {
offsetx = j;
delta = w1 - offsetx;
interval = (finish - begin) / (delta - 1); // 计算每个像素变化的大小
image.at<float>(i, j) = begin + (j - offsetx)*interval;
}
else if (pv == 0 && offsetx > 0 && (j - offsetx) < delta) {
image.at<float>(i, j) = begin + (j - offsetx)*interval;
}
}
}
}
效果:
1、图像拼接重合区域mask
2、拼接前图像
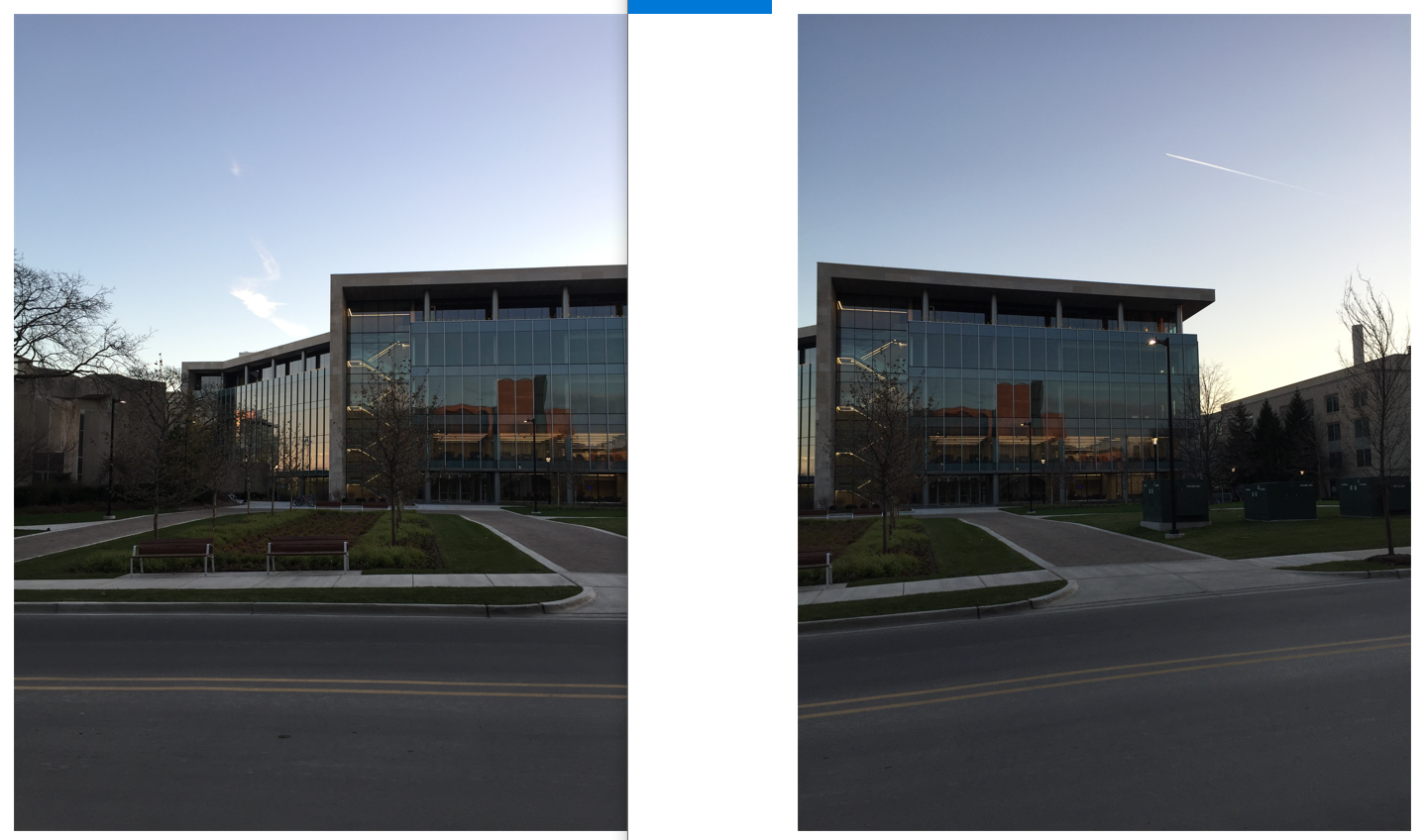
3、图像拼接效果图

10、条码标签定位与有无判定
代码实现:
ORBDetector.h
#pragma once
#include <opencv2/opencv.hpp>
class ORBDetector {
public:
ORBDetector(void);
~ORBDetector(void);
void initORB(cv::Mat &refImg);
bool detect_and_analysis(cv::Mat &image, cv::Mat &aligned);
private:
cv::Ptr<cv::ORB> orb = cv::ORB::create(500);
std::vector<cv::KeyPoint> tpl_kps;
cv::Mat tpl_descriptors;
cv::Mat tpl;
};
ORBDetector.cpp
#include "ORBDetector.h"
ORBDetector::ORBDetector() {
std::cout << "create orb detector..." << std::endl;
}
ORBDetector::~ORBDetector() {
this->tpl_descriptors.release();
this->tpl_kps.clear();
this->orb.release();
this->tpl.release();
std::cout << "destory instance..." << std::endl;
}
void ORBDetector::initORB(cv::Mat &refImg) {
if (!refImg.empty()) {
cv::Mat tplGray;
cv::cvtColor(refImg, tplGray, cv::COLOR_BGR2GRAY);
orb->detectAndCompute(tplGray, cv::Mat(), this->tpl_kps, this->tpl_descriptors);
tplGray.copyTo(this->tpl);
}
}
bool ORBDetector::detect_and_analysis(cv::Mat &image, cv::Mat &aligned) {
// keypoints and match threshold
float GOOD_MATCH_PERCENT = 0.15f;
bool found = true;
// 处理数据集中每一张数据
cv::Mat img2Gray;
cv::cvtColor(image, img2Gray, cv::COLOR_BGR2GRAY);
std::vector<cv::KeyPoint> img_kps;
cv::Mat img_descriptors;
orb->detectAndCompute(img2Gray, cv::Mat(), img_kps, img_descriptors);
std::vector<cv::DMatch> matches;
cv::Ptr<cv::DescriptorMatcher> matcher = cv::DescriptorMatcher::create("BruteForce-Hamming");
// auto flann_matcher = cv::FlannBasedMatcher(new cv::flann::LshIndexParams(6, 12, 2));
matcher->match(img_descriptors, this->tpl_descriptors, matches, cv::Mat());
// Sort matches by score
std::sort(matches.begin(), matches.end());
// Remove not so good matches
const int numGoodMatches = matches.size() * GOOD_MATCH_PERCENT;
matches.erase(matches.begin() + numGoodMatches, matches.end());
// std::cout << numGoodMatches <<"distance:"<<matches [0].distance<< std::endl;
if (matches[0].distance > 30) {
found = false;
}
// Extract location of good matches
std::vector<cv::Point2f> points1, points2;
for (size_t i = 0; i < matches.size(); i++)
{
points1.push_back(img_kps[matches[i].queryIdx].pt);
points2.push_back(tpl_kps[matches[i].trainIdx].pt);
}
cv::Mat H = findHomography(points1, points2, cv::RANSAC);
cv::Mat im2Reg;
warpPerspective(image, im2Reg, H, tpl.size());
// 逆时针旋转90度
cv::Mat result;
cv::rotate(im2Reg, result, cv::ROTATE_90_COUNTERCLOCKWISE);
result.copyTo(aligned);
return found;
}
object_analysis.cpp
#include "ORBDetector.h"
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat refImg = imread("D:/facedb/tiaoma/tpl2.png");
ORBDetector orb_detector;
orb_detector.initORB(refImg);
vector<std::string> files;
glob("D:/facedb/orb_barcode", files);
cv::Mat temp;
for (auto file : files) {
std::cout << file << std::endl;
cv::Mat image = imread(file);
int64 start = getTickCount();
bool OK = orb_detector.detect_and_analysis(image, temp);
double ct = (getTickCount() - start) / getTickFrequency();
printf("decode time: %.5f ms\n", ct * 1000);
std::cout << "标签: " << (OK == true) << std::endl;
imshow("temp", temp);
waitKey(0);
}
}
效果:
1、检测图片

2、模板图片

11、DNN概述
DNN模块介绍:
- DNN - Deep Neutal Network
- OpenCV3.3 开始发布
- 支持VOC与COCO数据集的对象检测模型
- 包括SSD/Faster-RCNN/YOLOv4等
- 支持自定义对象检测
- 支持人脸检测
函数知识:
- 读取模型
- 转换数据与设置
- 推理输出
Net net = readNetFromTensorflow(model, config); // 支持tensorflow
Net net = readNetFromCaffe(config, model); // 支持caffe
Net net = readNetFromONNX(onnxfile);
// 读取数据
Mat image = imread("D:/images/example.png");
Mat blob_img = blobFromImage(image, scalefactor, size, mean, swapRB);
net.setInput(blob_img);
// 推理输出
Mat result = net.forward();
后处理/输出解析:
- 不同网络的输出不同
- 如何解析要根据模型输出
- 对象检测网络SSD/Faster-RCNN解析
SSD的输出解析:
- http://download.tensorflow.org/models/object_detection/ssd_mobilenet_v1_coco_2017_11_17.tar.gz
- 1 x 1 x N x 7 - DetectOutput
- [image_id, label, conf, x_min, y_min, x_max, y_max]
Faster-RCNN输出解析:
- http://download.tensorflow.org/models/object_detection/faster_rcnn_inception_v2_coco_2018_01_28.tar.gz
- 1 x 1 x N x 7 - DetectOutput
- [image_id, label, conf, x_min, y_min, x_max, y_max]
YOLOv4输出解析:
- 解析多个输出层,80个类别 - N x W x H x D
- 4 + 80 预测,三个输出层
- centerx,centery,width,height
- 13 x 13 x 255 = 13 x 13 x 3 x 85
- NMS
- https://github.com/AlexeyAB/darknet/wiki/YOLOv4-model-zoo
OpenCV4之特征提取与对象检测的更多相关文章
- [OpenCV-Python] OpenCV 中计算摄影学 部分 IX 对象检测 部分 X
部分 IX计算摄影学 OpenCV-Python 中文教程(搬运)目录 49 图像去噪目标 • 学习使用非局部平均值去噪算法去除图像中的噪音 • 学习函数 cv2.fastNlMeansDenoisi ...
- 浏览器。浏览器对象检测、Chrome调试工具
chrome浏览器的flash问题: 2017-12-26 chrome浏览器的flash有无法显示无法正常运行的问题时,解决方法如下: https://qzonestyle.gtimg.cn/qzo ...
- 斯坦福新深度学习系统 NoScope:视频对象检测快1000倍
以作备份,来源http://jiasuhui.com/archives/178954 本文由“新智元”(微信ID:AI_era)编译,来源:dawn.cs.stanford.edu,编译:刘小芹 斯坦 ...
- 计算机视觉中的对象检测,Python用几段代码就能实现
目前计算机视觉(CV)与自然语言处理(NLP)及语音识别并列为人工智能三大热点方向,而计算机视觉中的对象检测(objectdetection)应用非常广泛,比如自动驾驶.视频监控.工业质检.医疗诊断等 ...
- [object_detect]使用MobileNetSSD进行对象检测
使用MobileNetSSD进行对象检测 1.单帧图片识别 object_detection.py # 导入必要的包 import numpy as np import argparse import ...
- [OpenCV实战]13 OpenCV中使用Mask R-CNN进行对象检测和实例分割
目录 1 背景介绍 1.1 什么是图像分割和实例分割 1.2 Mask-RCNN原理 2 Mask-RCNN在OpenCV中的使用 2.1 模型下载 2.2 模型初始化 2.3 模型加载 2.4 输出 ...
- 【YOLO】实时对象检测使用体验
官网:https://pjreddie.com/darknet/yolo/ 以下全部在服务器上完成,服务器上是有opencv等. 1.安装Darknet git clone https://githu ...
- 常用 对象检测 api
isPrototypeOf() 判断某个 proptotype 对象和某个实例之间的关系 alert(Cat.prototype.isPrototypeOf(cat1)); //true ale ...
- python imageai 对象检测、对象识别
imageai库里面提供了目标识别,其实也可以说是目标检测,和现在很多的收集一样就是物体识别.他可以帮你识别出各种各样生活中遇见的事物.比如猫.狗.车.马.人.电脑.收集等等. 感觉imageai有点 ...
- 针对unicode对象---检测字符串是否只由数字组成
随机推荐
- .NET Core 离线生成 Tron 波场私钥和地址笔记
NuGet 引入依赖库 PM> Install-Package Tron.Wallet.Net 随机生成私钥和对应的地址 using Tron.Wallet.Net; namespace Con ...
- 2023-04-26:给定一个数组componets,长度为A, componets[i] = j,代表i类型的任务需要耗时j 给定一个二维数组orders,长度为M, orders[i][0]代表i
2023-04-26:给定一个数组componets,长度为A, componets[i] = j,代表i类型的任务需要耗时j 给定一个二维数组orders,长度为M, orders[i][0]代表i ...
- Casdoor 开始
Casdoor 是一个基于 OAuth 2.0 / OIDC 的中心化的单点登录(SSO)身份验证平台,简单来说,就是 Casdoor 可以帮你解决用户管理的难题,你无需开发用户登录.注册等与用户鉴权 ...
- ITIL介绍
摘自:金角大王 https://www.cnblogs.com/alex3714/articles/5420433.html 本节内容 浅谈ITIL CMDB介绍 Django自定义用户认证 Rest ...
- phpstudy-sqlilabs-less-14
题目:POST - Double Injection - Single quotes- String - with twist 和上关一模一样 uname=1"or 1=1 #&pa ...
- 渗透测试-struts2攻防环境搭建拿shell
一.下载Jspstudy 打开目录D:\JspStudy\tomcat\webapps 二.打开struts2并进行拿shell 1.打开struts2 在浏览器中输入网址http://localho ...
- 图扑虚拟现实 VR 智慧办公室可视化
前言 "虚拟现实"是来自英文"Virtual Reality",简称 VR 技术,其是通过利用计算机仿真系统模拟外界环境,主要模拟对象有环境.技能.传感设备和感 ...
- Galaxy Project | 一些尝试与思考
很久都没有更新推文了,脑壳羞涩,快码不出字的节奏! 最近在尝试内部 Galaxy 一些新工具的开发和 Galaxy 核心版本的升级测试,发现一些问题,简单记录和聊一下吧. 一些尝试 对于在线的 web ...
- 一分钟学一个 Linux 命令 - cat 和 tail
前言 大家好,我是 god23bin.今天我给大家带来的是 Linux 命令系列,每天只需一分钟,记住一个 Linux 命令不成问题.今天,需要你花费两分钟时间,因为我们要介绍的是两个常用的查看文件内 ...
- undefined reference to错误的解决方法
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明.本文链接:https://blog.csdn.net/cserchen/article/deta ...