关于伺服刹车/急停/前后设备信号对接/PLC输入输出模块的公共端介绍
一、伺服刹车
关键词:急停,急停中间继电器、刹车中间继电器,刹车使能
正文:
通常情况不用硬件为主导而用程序来主导控制,多场景应用方便修改且安全可靠。
伺服刹车硬件,一般是24v电源给进去,就会释放刹车使能。
拿一个Z轴伺服作为对象。
1.程序上控制逻辑如下
急停按钮一般都是NC触点串联在电路中,NO触点信号接入急停中间继电器线圈,急停中间继电器NO触点信号再给入PLC作为急停信号。通过下面一段程序。
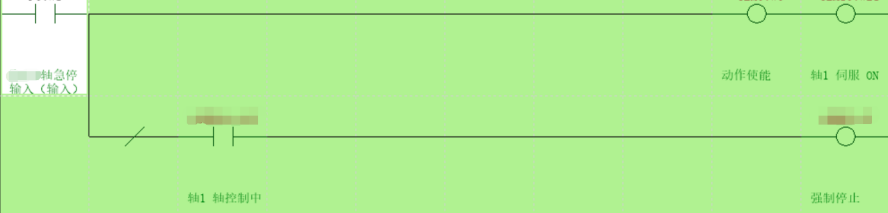
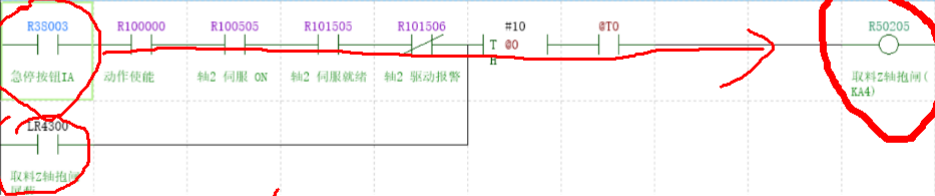
所以,一般情况下,急停没有被拍下,是有信号给plc的。此时急停信号是接通的,动作使能 伺服ON 伺服就绪是接通的,经过消抖后,抱闸线圈接通。程序这段逻辑先捋到这,抱闸线圈对于刹车中间继电器线圈,此时被接通,我们电路上会取刹车中间继电器的NC触点信号接入伺服刹车使能硬件上。所以此时刹车使能硬件是没有电源接入的,所以没有刹车。【不拍急停,伺服松开抱闸使能】
如果拍下急停按钮,急停NO给PLC,急停信号=0,抱闸KA=0,硬件上取其NC信号,刹车硬件没有接入电源,所以处于刹车状态。【拍急停,伺服抱闸】
还有一个屏蔽功能。【拍下急停,Z轴伺服抱闸,屏蔽功能打开,Z轴往下掉】
第二种情况,是取抱闸继电器NO串入抱闸电源回路。
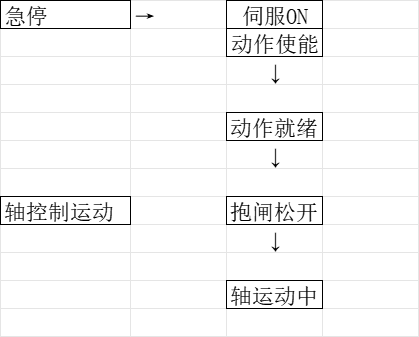
伺服ON、急停信号、抱闸三者之间的关系如下:
正常程序运行中,伺服ON=1,急停=1,抱闸继电器=1。抱闸硬件有电源所以松开。紧急情况拍急停,程序:急停=0→伺服ON=0→抱闸继电器=0。抱闸硬件无电源所以刹车。
看见刹车KA亮则无抱闸有伺服使能ON信号。
二、PLC的CPU及输入输出模块公共端
关键词:输入 输出 公共端 接线图 源型 漏型
正文:
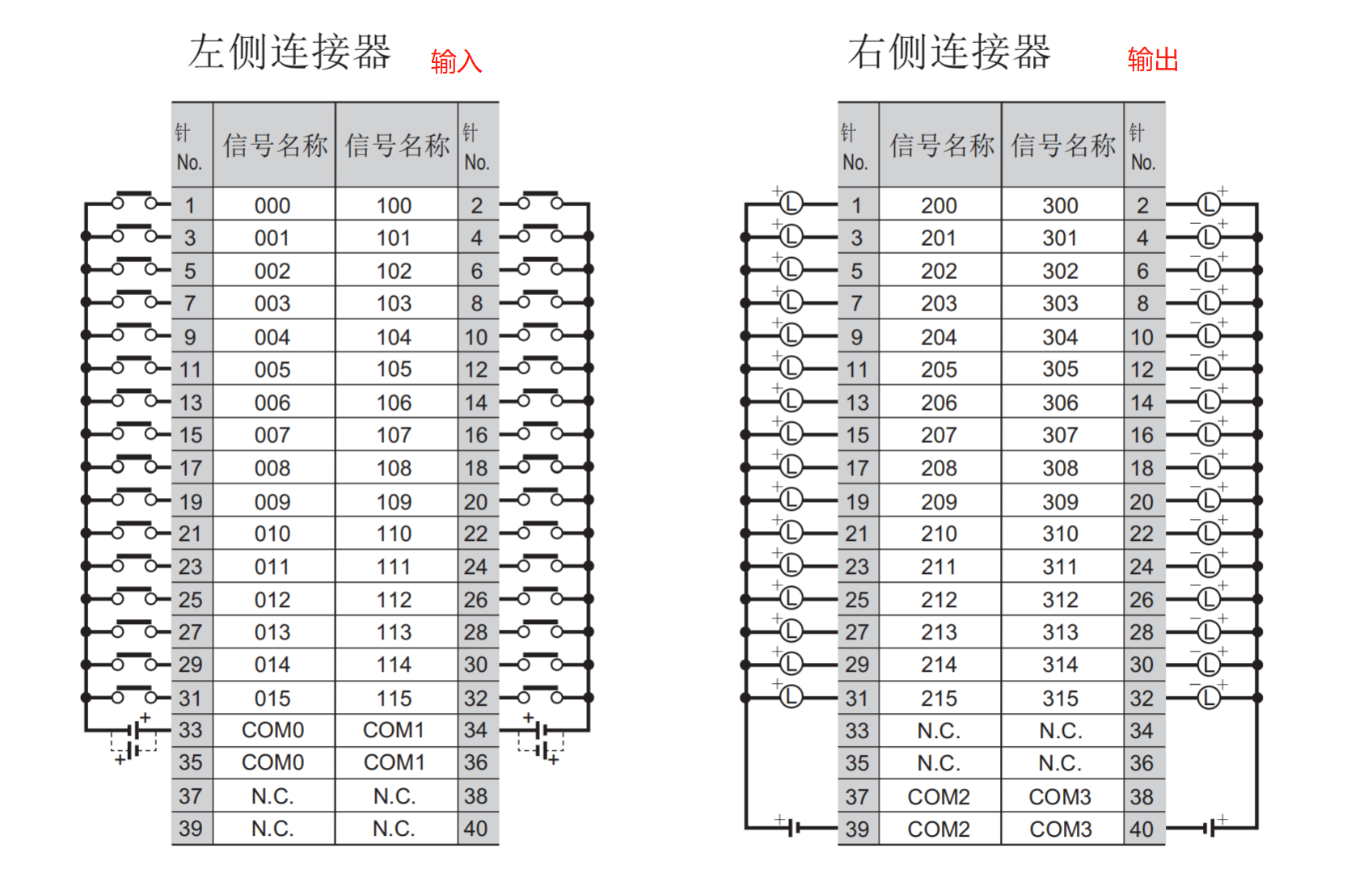
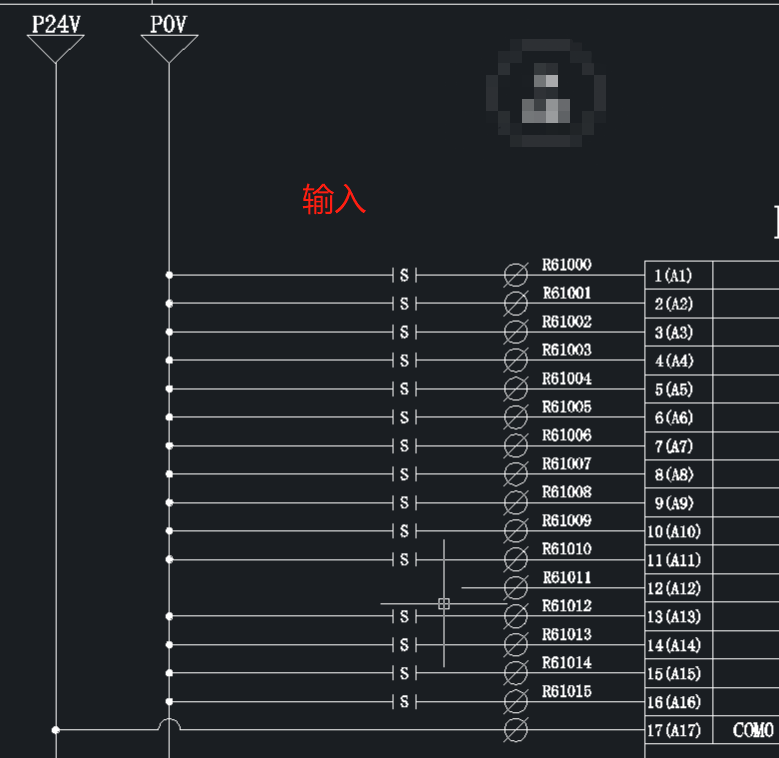
1.基恩士plc一般输入输出类型都是是NPN即漏型,汇川plc也是。而西门子一般是PNP源型。
2.漏型,在实际应用中可以记成都是低电平即0V。原理原则:只要有形成电源回路作用在光电耦合器上形成信号输入输出。
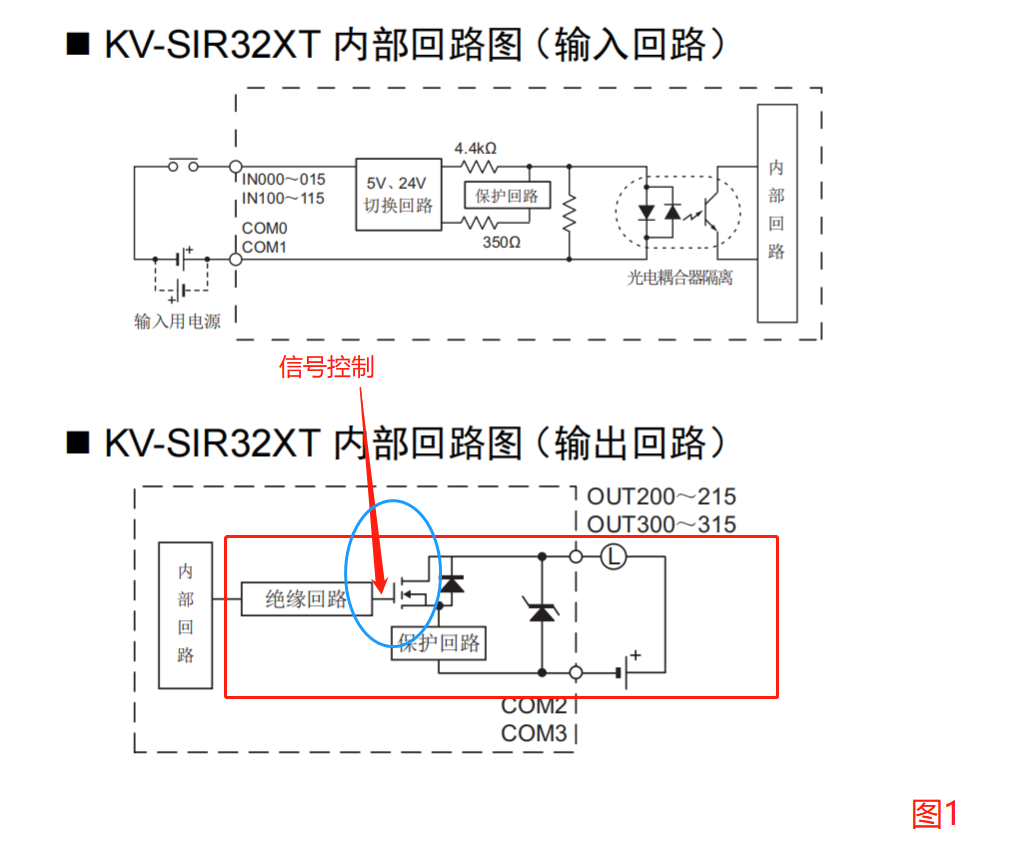
输入信号为0v,经过内置电阻,输入公共端为24v。【若是干湿节点可以切换】。
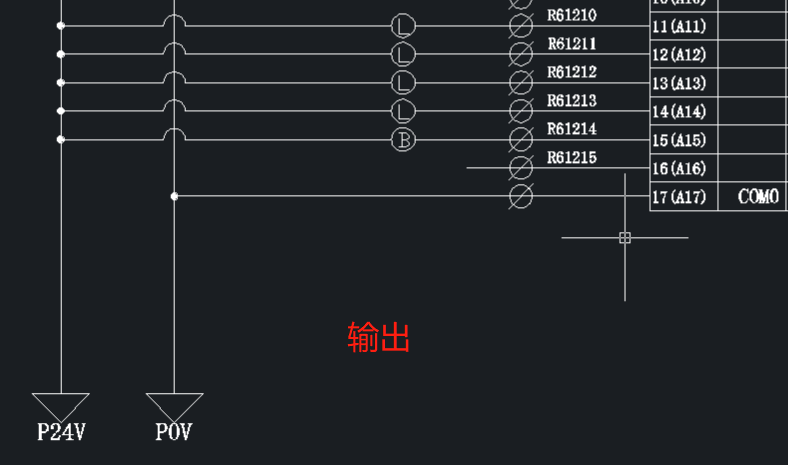
细致分析输出公共端举例:图1输出的内部接线图,我们只看MOS场效应管,和负载L以及DC电源组成的回路。
场效应管的G栅极与S源极施加电压导通后(相当于开关),漏极与源极就会导通与负载和电源形成正确的回路。
一旦控制信号接通施加电压后,负载就会接通。
因此基恩士NPN型plc的输出公共端是0V。
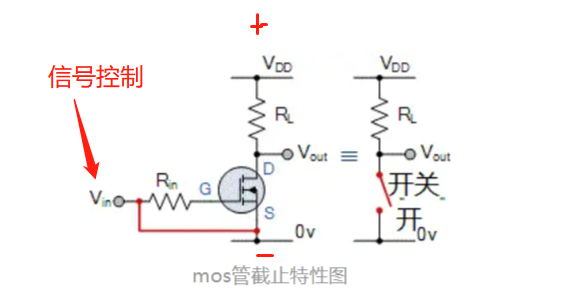
引用MOS管控制原理介绍链接:https://zhuanlan.zhihu.com/p/519594505
如下图:
源型反之。
三、前后设备对接交互信号介绍
关键词:前后机 航空对接插头 前机 本机 后机 请求 允许 完成 就绪 本机电源
此类交互信号传递类型为IO信号,电路上硬件连线即可完成。交互逻辑如下
前机 本机 后机
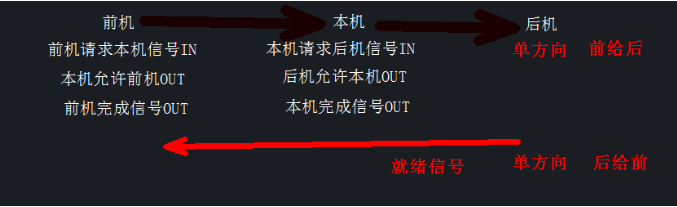
交互一般需要8个信号:4DI、4DO。
设计一台设备只需要站在本机角度去罗列,如下。
本机输入DI: 前机请求 前机完成 后机就绪 后机允许。
本机输出DO: 本机允许 本机就绪 本机请求 本机完成。
关于伺服刹车/急停/前后设备信号对接/PLC输入输出模块的公共端介绍的更多相关文章
- 【树莓派】Python开发工控机急停设计
背景 我们在一些工业产品中使用树莓派替代了PLC和上位机,并借助树莓派的算力将AI和机器视觉引入工业领域. 以前的产品都不存在动作机构,仅仅将结果输出到指示灯.蜂鸣器或者显示器上,没有安全隐患, 现在 ...
- [UE4]点积、余弦和急停
急停控制:
- TCP控制位 sendUrgentData 队列 队列元素 优先级 极限 急停 置顶
Socket (Java Platform SE 7 ) https://docs.oracle.com/javase/7/docs/api/java/net/Socket.html#sendUrge ...
- iNeuOS工业互联平台,机床&PLC硬件网关与平台无缝对接,进行数据交互
目 录 1. 概述... 2 2. 平台演示... 2 3. 硬件网关的基本操作... 3 3.1 数据采集... 3 3.2 ...
- Akka(25): Stream:对接外部系统-Integration
在现实应用中akka-stream往往需要集成其它的外部系统形成完整的应用.这些外部系统可能是akka系列系统或者其它类型的系统.所以,akka-stream必须提供一些函数和方法来实现与各种不同类型 ...
- 关于STM32数据手册中的定时器信号
首先,我们可以看到这个图大概有两个不分,一个部分是时钟源,另一个部分则是输入输出 时钟源计数,到CNT计数器,然后根据捕获比较寄存器进行记录或比较.记录或比较有不同的配置. 首先是TI信号TI1 TI ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.1 TwinCAT控制松下伺服 NC高级
本节主要演示了使用自定义函数实现电机的运动(梯形曲线和S曲线都有实现),这里的JOG+和JOG-,针对单个关节实现了PTP的运动(跟贝福的MoveAbsolute功能块实现效果一致),在此没有介绍运动 ...
- Linux信号
信号本质上就是一个软件中断,它既可以作为两个进程间的通信的方式, 更重要的是, 信号可以终止一个正常程序的执行, 通常被用于处理意外情况 ,* 信号是异步的, 也就是进程并不知道信号何时会到达 $ki ...
- 利用过采样技术提高ADC测量微弱信号时的分辨率
1. 引言 随着科学技术的发展,人们对宏观和微观世界逐步了解,越来越多领域(物理学.化学.天文学.军事雷达.地震学.生物医学等)的微弱信号需要被检测,例如:弱磁.弱光.微震动.小位移.心电.脑电等[1 ...
- SDC(7) -- 关于使能信号的时序放松
先看下图: 假如使能信号的有效时间为时钟周期的2倍,此时需要使用 set_multicycle_path 放松使能信号 sel_xy_nab ,若是每个寄存器使能端都约束一遍,那就太麻烦了: 这时可以 ...
随机推荐
- kafka---面经
kafka深入理解 消息队列 作用,优点? 异步:比如查看文章,点赞收藏评论等操作,提升文章热度,提升个人社区贡献度,提升个人社区积分,刷新社区贡献度排行榜.将其他操作放到消息队列,相应的模块从消息队 ...
- (广州南沙)vue知识点整理2021,主要是防止忘记防备快速翻看
/////////////////////////// vue 中使用路由技巧:router //////////////////////////////// 写笔记说明,之前在江门工作 ...
- Failed to collect dependencies at com.oneconnect......-Intellij-IDEA-使用maven打包采坑记录
一.问题由来 由于刚开始使用Intellij-IDEA,使用不是很熟练,因此使用过程中出现各种各样的问题.最近开发过程中,准备使用IDEA打包项目发布到测试服务器,报错信息如下: Failed to ...
- 【mac】Alfred 无法调用Terminal
原因:是从mac app商店安装的Alfred class 解决方案:建议从官网下载安装:https://www.alfredapp.com/ 参考:https://www.alfredforum.c ...
- Morris遍历:常数空间遍历二叉树
Morris遍历 cur有左树且第一次遍历到,去左孩子 没左树或者第二次遍历到,去右孩子 没右树,去后继节点 得到Morris序.对于该序列中出现两次的节点,只保留第一次遍历,结果就是先序遍历.只保留 ...
- Performance Improvements in .NET 8 -- Native AOT & VM & GC & Mono【翻译】
原生 AOT 原生 AOT 在 .NET 7 中发布.它使 .NET 程序在构建时被编译成一个完全由原生代码组成的自包含可执行文件或库:在执行时不需要 JIT 来编译任何东西,实际上,编译的程序中没有 ...
- 你是怎么理解ES6中 Generator的?使用场景?
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 一.介绍 Generator 函数是 ES6 提供的一种异步编程解决方案,语法行为与传统函数完全不同 回顾下上文提到的解决异步的手段: 回 ...
- Oracle ORA-09925
Error : 30: Read-only file system 造成这个问题的原因大多数是因为非正常关机后导致文件系统受损引起的,在系统重启之后,受损分区就会被Linux自动挂载为只读. 解决办法 ...
- 数字电路之MOS设计
数字电路之MOS设计 1.MOS的基本性质 MOS,即场效应管,四端器件,S.D.G.B四个端口可以实现开和关的逻辑状态,进而实现基本的逻辑门.NMOS和PMOS具有明显的对偶特性:NMOS高电平打开 ...
- AXI4协议的物理模型
AXI4的物理传输模型 1.AXI4的组成部分 首先说一下文章是学习<基于AXI4的IP核互联的设计与验证>莫锦辉的学习笔记.文中大部分的知识都是来源于这篇论文,这里学习以便理解AXI4协 ...