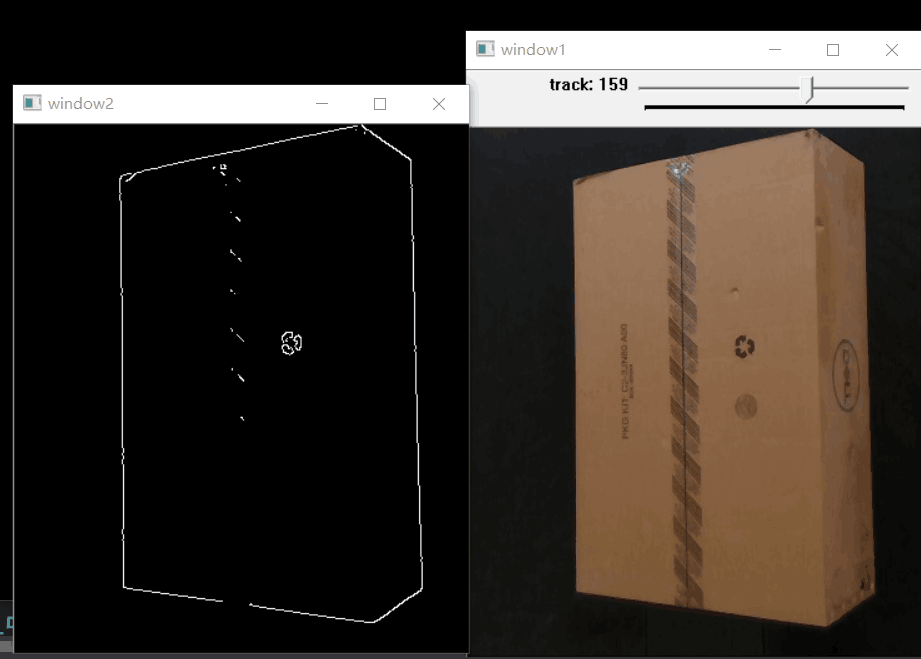
Opencv Canny
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat img1, img2, img3, img_gray, kernel_x, kernel_y;
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
char win4[] = "window4";
int threshold_value = 0;
int max_value = 255;
RNG rng(12345);
void Canny_C(int,void*);
//Canny
int Demo_Canny()
{
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
createTrackbar("track", win1, &threshold_value, max_value, Canny_C);
Canny_C(0,0);
return 0;
}
void Canny_C(int, void*)
{
blur(img1, img2, Size(3, 3), Point(-1, -1));
Canny(img2, img3, threshold_value, threshold_value+3, 3, false);
imshow(win2, img3);
}
int main()
{
Demo_Canny();
waitKey(0);
return 0;
}
Opencv Canny的更多相关文章
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- opencv::Canny边缘检测
Canny算法介绍 五步 in cv::Canny 高斯模糊 - GaussianBlur 灰度转换 - cvtColor 计算梯度 – Sobel/Scharr 非最大信号抑制 高低阈值输出二值图像 ...
- OpenCV Canny 边缘检测
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" #i ...
- OpenCV2马拉松第17圈——边缘检測(Canny边缘检測)
计算机视觉讨论群162501053 转载请注明:http://blog.csdn.net/abcd1992719g 收入囊中 利用OpenCV Canny函数进行边缘检測 掌握Canny算法基本理论 ...
- 线特征---Edge Drawing(七)
http://ceng.anadolu.edu.tr/cv/edgedrawing/ References C. Topal, C. Akinlar, Edge Drawing: A Combined ...
- OpenCV图像Canny边缘检测
Canny边缘检测 图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘函数原型: void cvCanny( ...
- 【OpenCV新手教程之十二】OpenCV边缘检測:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/25560901 作者:毛星云(浅墨) ...
- openCV(四)---Canny边缘检测
图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘. 直接上代码,函数简介都在代码注释中 //canny边缘检测 -(void) ...
- OpenCV探索之路(六):边缘检测(canny、sobel、laplacian)
边缘检测的一般步骤: 滤波--消除噪声 增强--使边界轮廓更加明显 检测--选出边缘点 Canny算法 Canny边缘检测算法被很多人推崇为当今最优秀的边缘检测算法,所以我们第一个就介绍他. open ...
随机推荐
- hadoop之 HDFS-Hadoop存档
每个文件按块方式存储, 每个块的元数据存储在namenode的内存中 Hadoop存档文件或HAR文件是一个更高效的文件存档工具,它将文件存入HDFS块,在减少内存使用的同时,允许对文件进行透明地访问 ...
- 队列之blah集合
做了一个NOI上面的问题,叫blah集合,以a为基数,则2x+1和3x+1都在集合中,且集合中全部元素都由此计算得来.a∈[1,50],问升序排列后第n(n∈[1,1000000])个元素是多少.以输 ...
- ARP的一次请求与应答
ARP: 我们知道,网络层和网络层以上使用的是IP地址,但在实际网络的链路上传送数据帧时,数据包首先是被网卡接受到再去处理上层协议的,所以最终还是必须使用该网络的硬件地址.但IP地址和下面的网络的硬件 ...
- java代码----------实现写出循环
总结:对于循环次数累加.等等总是不知道在哪一行插入 package com.mmm; //输出10个数字中,小于5的数字 public class hai { public static void m ...
- Java经典练习题_Day04
一.选择题 1. 下列关于数组的说法正确的是:(A) A. 在Java中数组的长度是可变的 B. 数组中存储的数据的类型是相同的 C. 数组在进行扩容操作的时候源数组的地址不发生改变 D. int[] ...
- 嵌入式Linux驱动和固件有何区别?供应商是如何用固件压缩成本的?
作为一个驱动开发者, 你可能发现你面对一个设备必须在它能支持工作前下载固件到它里面. 硬件市场的许多地方的竞争是如此得强烈, 以至于甚至一点用作设备控制固件的 EEPROM 的成本制造商都不愿意花费. ...
- 【语音识别】Microsoft Speech Platform 自学笔记2 环境要求与安装过程
笔记人:又吹风 时 间:2012/12/16 主要内容:Microsoft Speech Platform的环境要求与安装过程. 上次也说过了,当前Microsoft Speech Platform最 ...
- 【洛谷】P1379 八数码难题(bfs)
题目 题目描述 在3×3的棋盘上,摆有八个棋子,每个棋子上标有1至8的某一数字.棋盘中留有一个空格,空格用0来表示.空格周围的棋子可以移到空格中.要求解的问题是:给出一种初始布局(初始状态)和目标布局 ...
- An Autofac Lifetime Primer
Or, “Avoiding Memory Leaks in Managed Composition” Understanding lifetime can be pretty tough when y ...
- sram的读和写
sram的型号:ISSI IS61LV25616 -10TL 以上是数据手册上的. 对sram的认识:SRAM不需要刷新电路即能保存它内部存储的数据.而DRAM(Dynamic Random Acce ...