【RT-Thread笔记】BH1750软件包的使用
BH1750简介
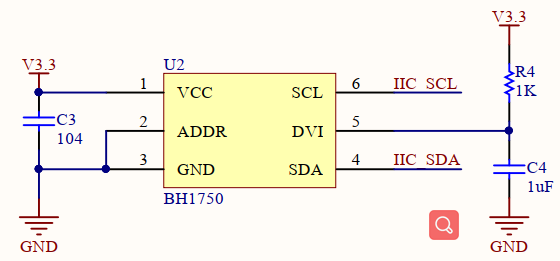
BH1750是一种用于两线制串行总线接口的16位数字型光强度传感器集成电路。利用它的高分辨率可以探测较大范围的光强度变化。(1lx~65535lx)。
创建工程、验证
在RT-Thread中读取BH1750数据有两种方法:一种方法是借助bh1750软件包;另一种方法是直接使用i2c驱动框架读取BH1750数据。
关于直接使用i2c驱动框架读取BH1750数据的方法可以阅读Mculover666兄的这篇:
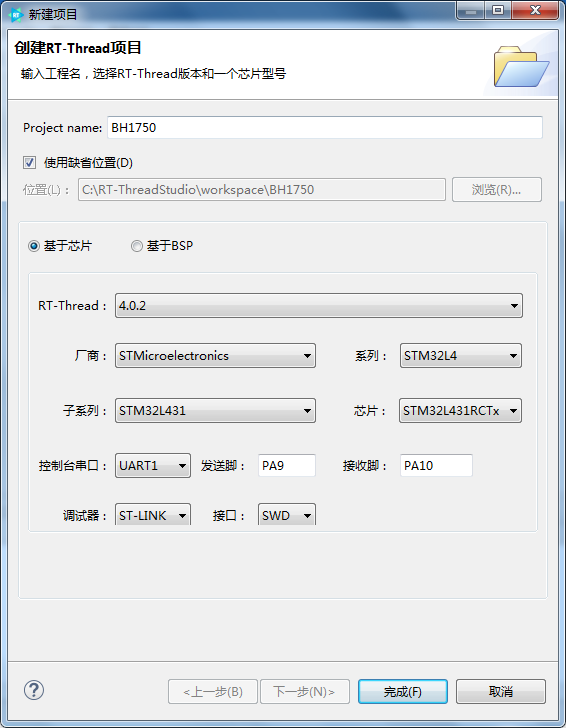
本次实验我们借助bh1750软件包来读取BH1750传感器数据,使用RT-Thread Studio V1.1.0来创建工程。
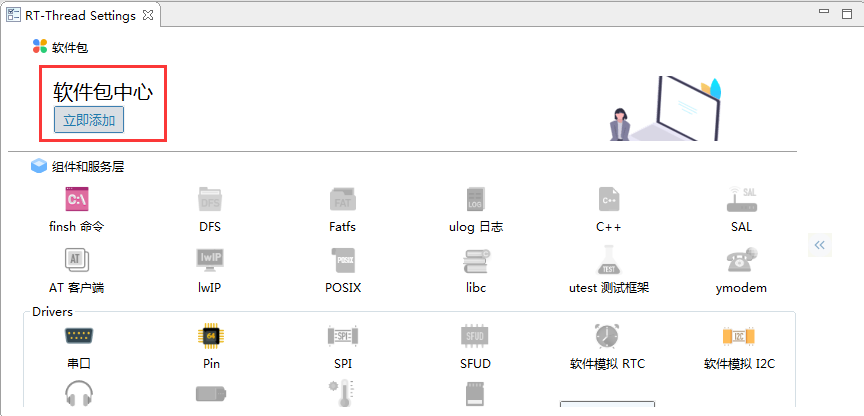
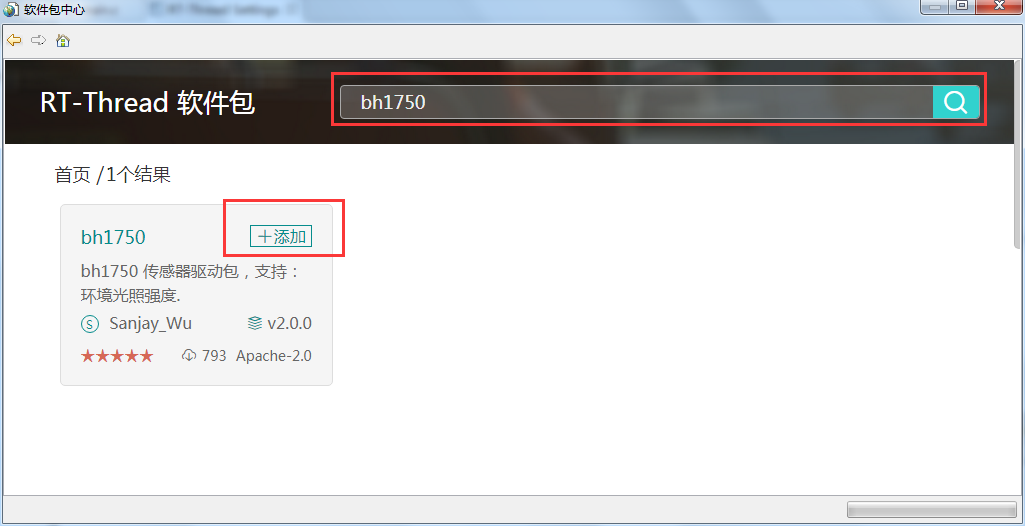
1、添加bh1750软件包
2、打开i2c设备驱动
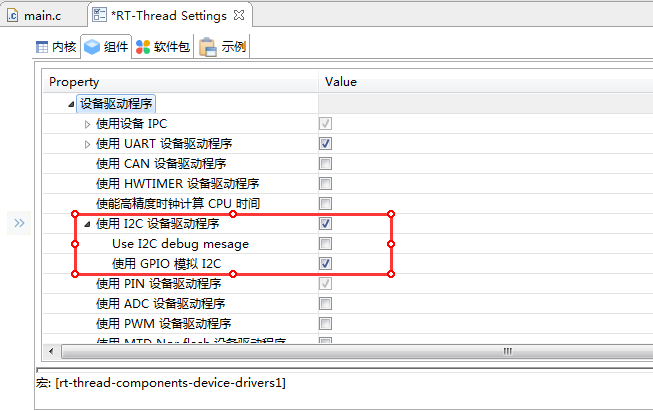
目前只有软件i2c驱动。保存RT-Thread Settings文件。编译报错:
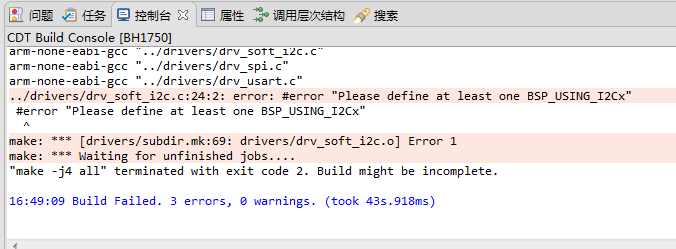
那是因为我们没有打开I2C相关的宏,drv_soft_i2c.c中模拟了几个i2c,我们要确认我们使用哪一个i2c与bh1750传感器相连。
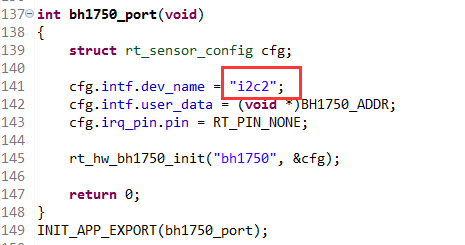
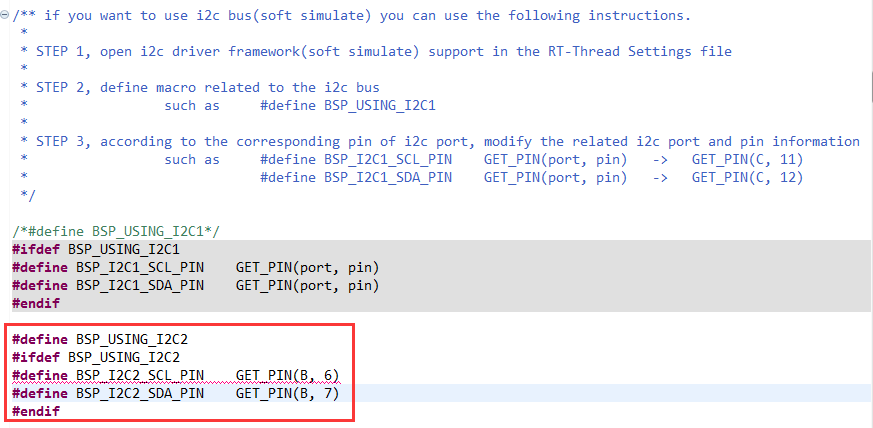
这里可以看到bh1750的示例的初始化函数中使用了i2c2,所以相应的我们需要在board.h中打开i2c2相关的宏,需要打开、修改哪些宏可以看相关注释:
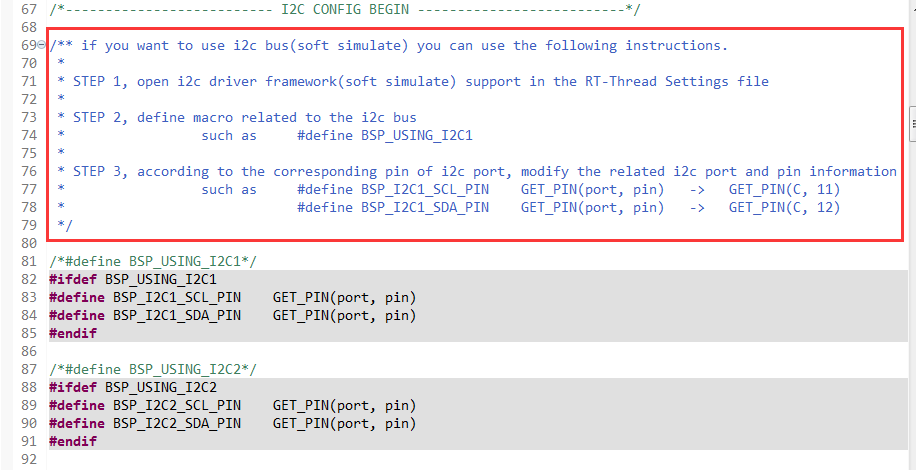
这里我们使用的是小熊派开发板,bh1750与MCU通过PB6、PB7引脚相连:
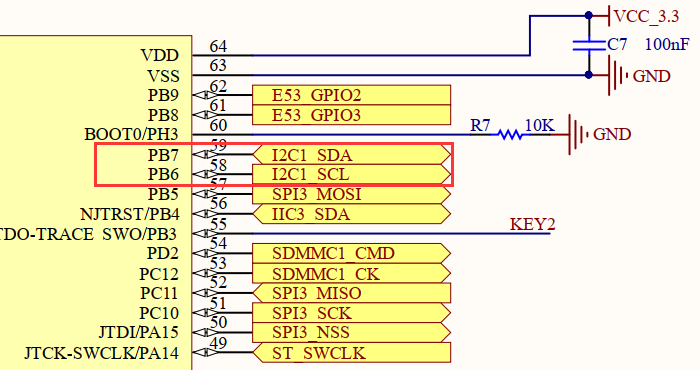
虽然PB6、PB7可以配置为硬件i2功能,但是我们这里使用的是软件i2c,所以这里的PB6、PB7是当做gpio来用的。然后我们根据注释的说明把代码改为:
然后编译报错,错误提示这几个宏有问题。反反复复检查,好像没什么问题,为啥就会疯狂报错。隐约记得有些例程例程中表示引脚好像不是这么表示的,而是类似这样的:
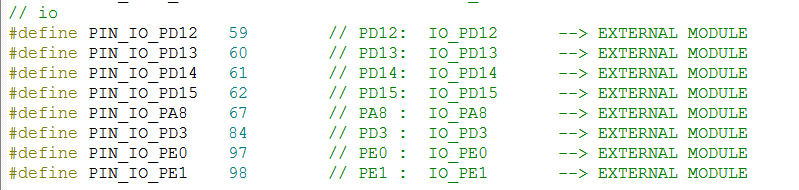
每个引脚都有一个新的代号,而这些引脚与代号的关系可以在drv_gpio.c中查看:
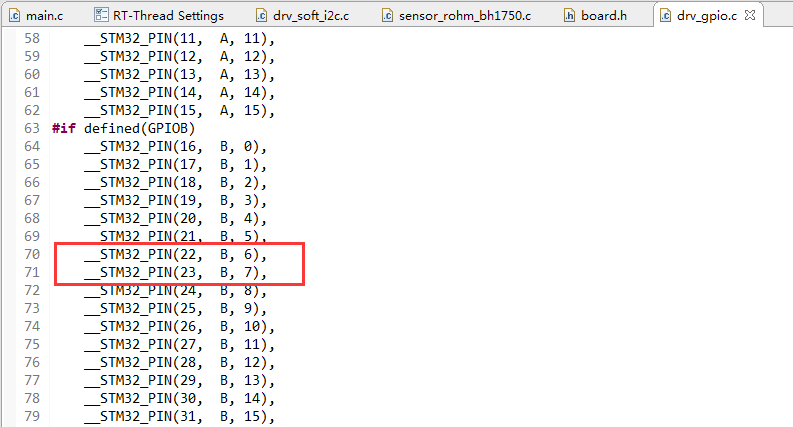
可以看到我们的PB6、PB7引脚的代号分别是22、23。然后尝试着把上面的i2c宏代码改为:
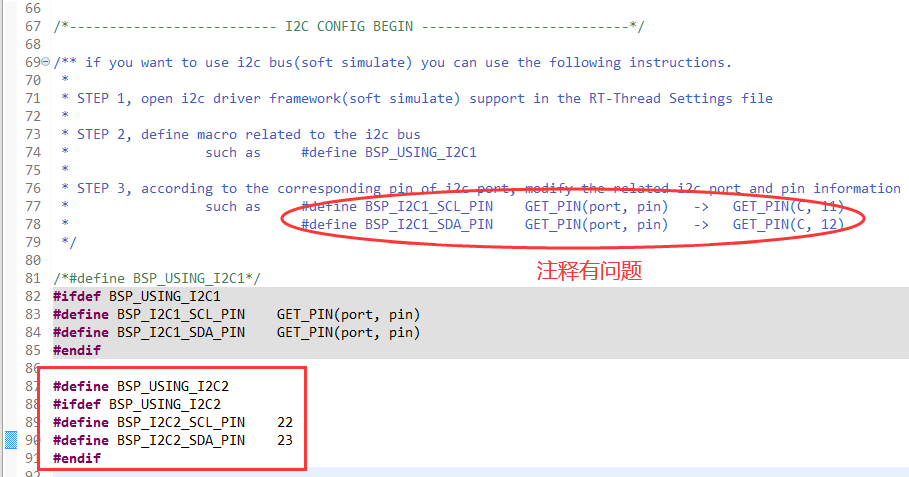
编译成功!然后试着读取传感器数据,也成功了。所以,这大概是RT-Thread Studio V1.1.0的一个小bug,模板工程的board.h里关于i2c的注释有问题,严重误导了我们。。
3、下载、验证
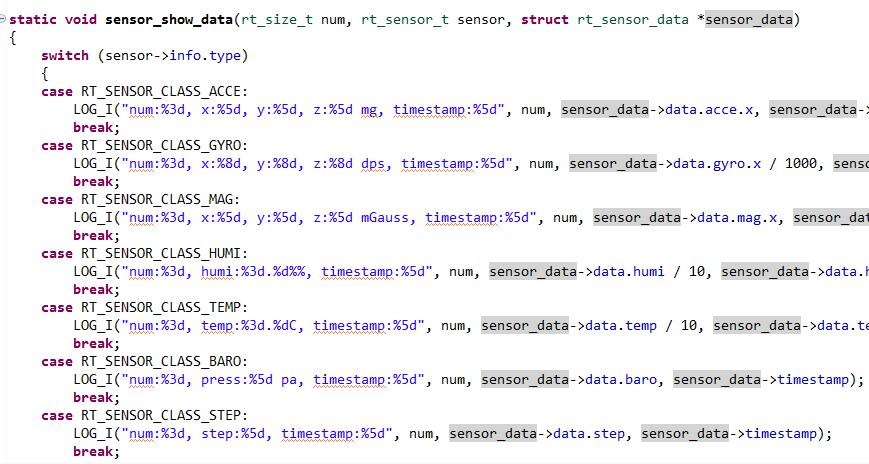
若执行sensor read命令无数据输出时,需要打开\components\drivers\sensors\sensor_cmd.c,在sensor_show_data函数后面自行增加环境光照强度打印代码:
case RT_SENSOR_CLASS_LIGHT:
LOG_I("num:%3d, light:%4d.%d, timestamp:%5d", num, sensor_data->data.light / 10, sensor_data->data.light % 10, sensor_data->timestamp);
break;
4、编写应用
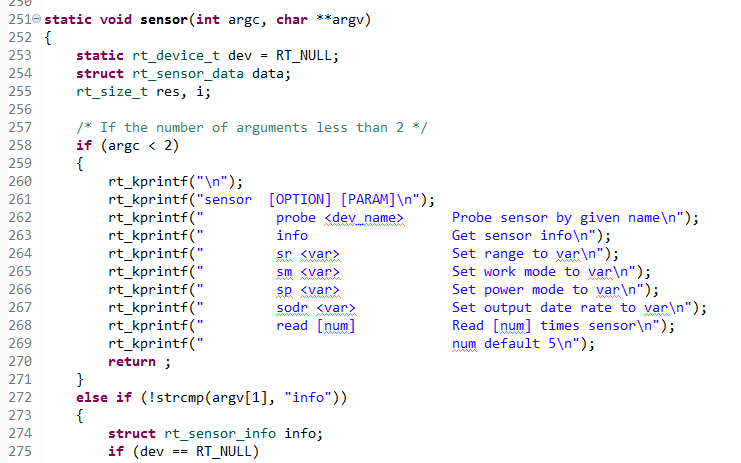
上面能输入那些命令对bh1750进行测试的前提是官方已经给我们写好了相关应用demo,在sensor_cmd.c中,如:
(1)测试函数
(2)显示数据
除此之外还有其它几个应用相关的函数。
我们也可以模仿sensor_cmd.c里面的代码来写我们自己的应用代码:
static void bh1750_thread_entry(void *parameter)
{
rt_device_t dev = RT_NULL;
struct rt_sensor_data data;
rt_size_t res;
/* 查找bh1750传感器 */
dev = rt_device_find("li_bh1750");
if (dev == RT_NULL)
{
rt_kprintf("Can't find device:li_bh1750\n");
return;
}
/* 以只读模式打开bh1750 */
if (rt_device_open(dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK)
{
rt_kprintf("open device failed!");
return;
}
while(1)
{
/* 从传感器读取一个数据 */
res = rt_device_read(dev, 0, &data, 1);
if (1 != res)
{
rt_kprintf("read data failed!size is %d", res);
}
else
{
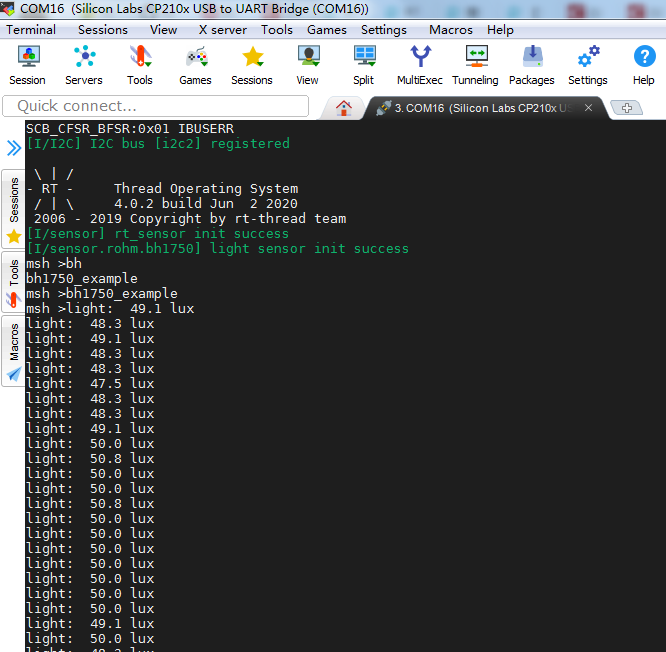
rt_kprintf("light:%4d.%d lux\n", data.data.light / 10, data.data.light % 10);
}
rt_thread_mdelay(1000);
}
}
int bh1750_example(void)
{
rt_thread_t tid; /* 线程句柄 */
tid = rt_thread_create("bh1750_thread",
bh1750_thread_entry,
RT_NULL,
1024,
20,
10);
if(tid != RT_NULL)
{
/* 线程创建成功,启动线程 */
rt_thread_startup(tid);
}
return 0;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(bh1750_example, bh1750 example);
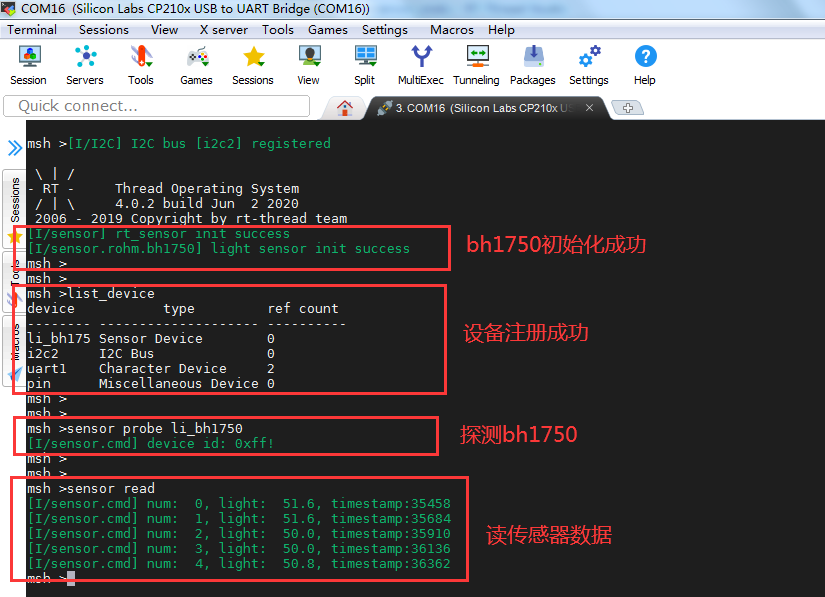
运行结果:
使用RT-Thread提供给我的I/O设备管理接口rt_device_find、rt_device_open、rt_device_read、rt_device_close来编写应用。相关框图:
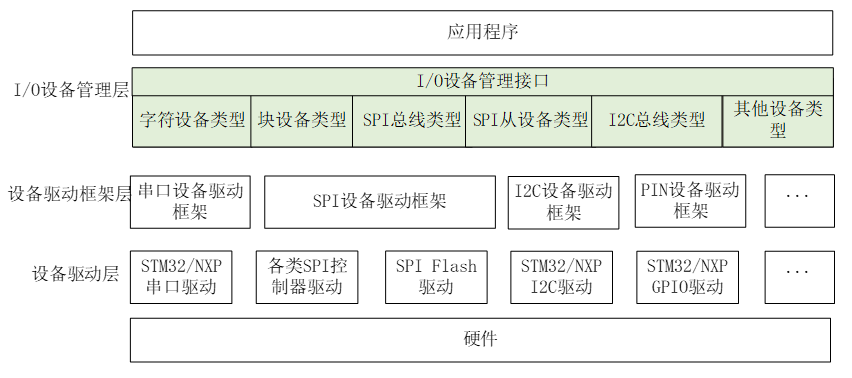
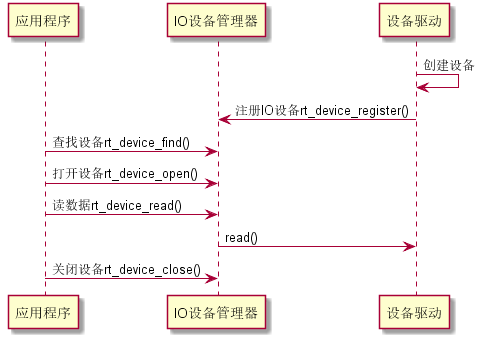
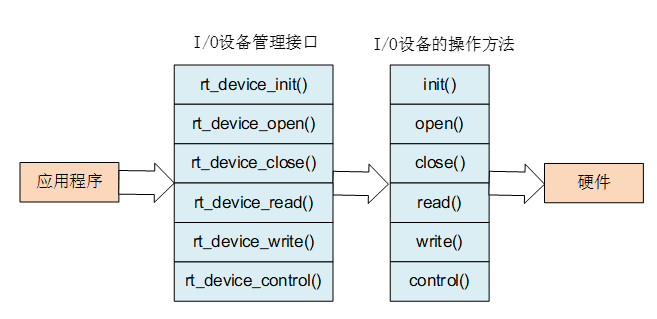
关于RT-Thread的I/O设备模型可查看往期笔记:【RT-Thread笔记】IO设备模型
以上就是本次的分享,如有错误,欢迎指出!
我的个人博客:https://www.lizhengnian.cn/
我的微信公众号:嵌入式大杂烩
我的CSDN博客:https://blog.csdn.net/zhengnianli

【RT-Thread笔记】BH1750软件包的使用的更多相关文章
- Thread笔记
Thread笔记 Thread——fork:https://www.cnblogs.com/noonjuan/diary/2019/08/03/11296217.html Thread——multip ...
- RT Thread 通过ENV来配置SFUD,操作SPI Flash
本实验基于正点原子stm32f4探索者板子 请移步我的RT Thread论坛帖子. https://www.rt-thread.org/qa/forum.php?mod=viewthread& ...
- STM32 + RT Thread OS 学习笔记[二]
串口通讯例程 通过上面的练习,对STM32项目开发有了一个直观印象,接下来尝试对串口RS232进行操作. 1. 目标需求: 开机打开串口1,侦听上位机(使用电脑串口测试软件)发送的信息,然后原样输 ...
- STM32 + RT Thread OS 学习笔记[三]
RTGUI 据说RTGUI是多线程的,因此与RT-Thread OS的耦合度较高,有可能要访问RT-Thread的线程控制块.如果要移植到其它OS,估计难度较大.目前还处于Alpha状态,最终将会包含 ...
- STM32 + RT Thread OS 学习笔记[四]
1. 补注 a) 硬件,打通通讯通道 若学习者购买了学习板,通常可以在学习板提供的示例代码中找到LCD的相关驱动代码,基本上,这里的驱动的所有代码都可以从里面找到. 从上面的示意图可见,M ...
- 【Python学习】Thread笔记(1)
Python学习笔记 - Thread(1) 标签(空格分隔): python from threading import Thread num = 2000 id_list = [] def do_ ...
- STM32 + RT Thread OS 串口通讯
1. 创建项目 a) 禁用Finsh和console b) 默认情况下,项目文件包含了finsh,它使用COM1来通讯,另外,console输出(rt_kprintf)也使用了COM1.因 ...
- linux笔记:软件包管理-软件包简介
软件包分类: 1.源码包: 2.二进制包(在centos里就是RPM包.和源码包的区别在于已经经过编译.) 源码包的优点和缺点: RPM包的优点和缺点:
- python的线程thread笔记
python的线程是用thread和threading来实现的.其中利用threading会更好,因为thread没有线程保护,当主线程退出了之后,子线程也会被强行退出.threading支持守护线程 ...
随机推荐
- 按照这些优化技巧来写 SQL,连公司 DBA 也鼓掌称赞!
原文链接:按照这些优化技巧来写 SQL,连公司 DBA 也鼓掌称赞! 刚毕业的我们,都以为使用 MySQL 是非常的简单的,无非都是照着 [select from where group by ord ...
- 测试开发专题:spring-boot统一异常捕获
java异常介绍 异常时相对于return的一种退出机制,可以由系统触发,也可由程序通过throw语句触发,异常可以通过try/catch语句进行捕获并处理,如果没有捕获,则会导致程序退出并输出异常栈 ...
- Directory类和DirectoryInfo类
1.Directory类 Directory类公开了用于创建.移动.枚举.删除目录和子目录的静态方法 2.DirectoryInfo类 DirectoryInfo和Directory类的区别可以参看F ...
- Jmeter5.2.1 三种参数化
Jmeter的相关操作,一定要会参数化,常见的参数化方法有如下几种: 一.用户定义的变量 常应用于设置一些全局变量,包括url.host.port等等 线程组--添加--配置元件--用户定义的变量,添 ...
- [zoj3629]找规律
题意:a[n] = ([n/1] + [n/2] + ... + [n/n]) & 1 == false,找出a数组的规律来就ok了. #pragma comment(linker, &quo ...
- springData表关系:一对多
一.编写实体类进行表关联 1.在一张表的关联属性上添加@OneToMany注解(关联属性用来记录多的一方的信息,是个集合,一般用set) 2.在另一个实体类的关联属性上添加@ManyToOne注解和 ...
- 暴力破解-HTTP Basic认证
0x01 HTTP Basic认证介绍 基本认证 basic authentication ← HTTP1.0提出的认证方法 基本认证步骤: 1. 客户端访问一个受http基本认证保护的资源. 2. ...
- csdn code git下载运行的问题
问题是,上传上去的脚本编码会有问题,老报 syntax error: unexpected end of file 搜索之,找到了 http://hi.baidu.com/homappy/item/f ...
- Puppeteer笔记(一):Puppeteer简介
一.Puppeteer简介 Puppeteer是NPM库,它提供了NodeJS高级API来控制Chrome.Puppeteer 默认以无头(无界面)方式运行,但也可以配置为运行有界面的Chrome. ...
- 策略模式C++实现
#include <iostream> using namespace std; class Strategy; class Context { public: Context(Strat ...