V4l2初识(七)-----------浅析app获取虚拟摄像头数据的过程
继续分析数据的获取过程:
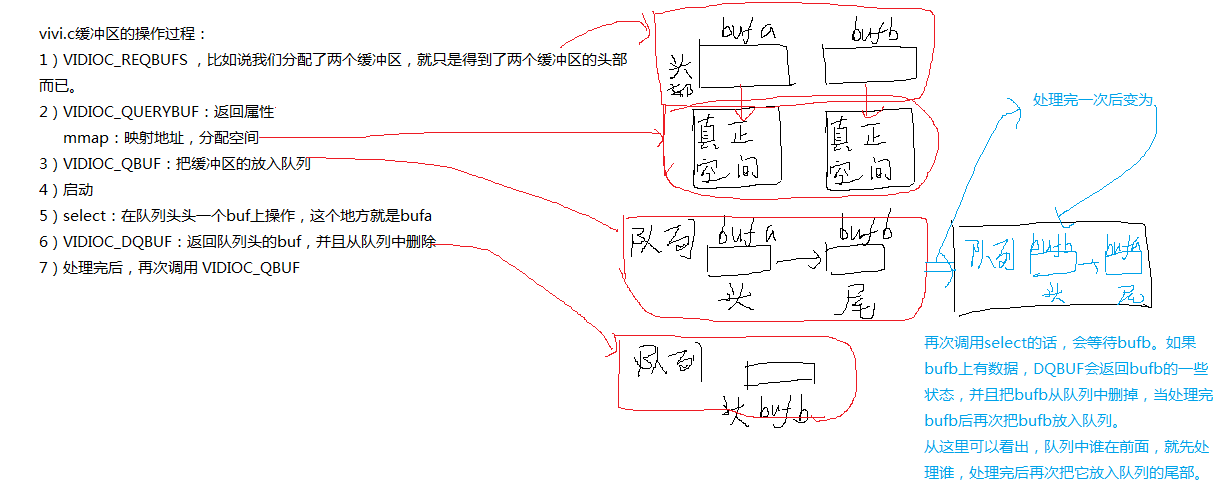
1、请求分配的缓冲区: ioctl(4,VIDIOC_REQBUFS)
vidioc_reqbufs
2、查询和映射缓冲区
ioctl(4,VIDIOC_QUERYBUF)
mmap
3、把缓冲区放入队列
ioctl(4,VIDIOC_QBUF)
4、启动摄像头
ioctl(4,VIDIOC_STREAMON
5、用select函数查询是否有数据
//驱动程序中必定有:产生数据、唤醒进程
6、有数据后,从队列中取出缓冲区
ioctl(4,VIDIOC_DQBUF
------------------------------------------------------------------------------------------------------------------------
app: VIDIOC_REQBUFS
vidioc_reqbufs
vb2_reqbufs(&dev->vb_vidq, p)//第一个参数表示队列
注意:这个ioctl只是分配缓冲区的头部信息,真正的缓存还没有被分配,在驱动程序里有一条原则,这些资源只有在用的时候才分配。
队列是在哪个地方进行初始化的?
/*此函数主要是返回dev->p->driver_data指针,
device结构体其实是对内核中所有设备的抽象表示,所有的设备都有一个device实例与之对应
device结构体的主要用法是将其嵌入到其他的结构体中,如platform_device*/
void *dev_get_drvdata(const struct device *dev)
{
if (dev && dev->p)
return dev->p->driver_data;
return NULL;
}
static inline void *video_get_drvdata(struct video_device *vdev)
{
return dev_get_drvdata(&vdev->dev);
}
struct video_device *video_devdata(struct file *file)
{
return video_device[iminor(file->f_path.dentry->d_inode)];//根据次设备号从video_device[]数组中取出device设备
}
static inline void *video_drvdata(struct file *file)
{
return video_get_drvdata(video_devdata(file));
}
static int vidioc_reqbufs(struct file *file, void *priv, struct v4l2_requestbuffers *p)
{
struct vivi_dev *dev = video_drvdata(file);//根据次设备号得到dev这个结构体
return vb2_reqbufs(&dev->vb_vidq, p);//把p这个缓冲区放入dev结构体中的vb_vidq队列中
}
-------------------------------------------------------------------------------------------------------------------
app: VIDIOC_QUERYBUF//查询所分配的缓冲区
vidioc_querybuf
注意,这里只是表示缓冲区将会有多大,并不表示这个缓冲区的内存被分配
static int vidioc_querybuf(struct file *file, void *priv, struct v4l2_buffer *p)
{
struct vivi_dev *dev = video_drvdata(file);
return vb2_querybuf(&dev->vb_vidq, p);/*获得缓冲区数据格式、大小、每一行长度、高度等*/
}
mmap //在这里才分配缓存。注意在分析mmap函数时,所用的内核不是3.4.2.是根据韦老大讲解的整理的
v4l2_mmap
vivi_mmap
videobuf_mmap_mapper
_videobuf_mmap_mapper //该函数在videobuf_vmalloc.c里面
-----------------------------------------------------------------------------------------------------------
app: VIDIOC_QBUF //把缓冲区放入队列(也是根据韦老大讲解的进行整理,内核不是3.4.2)
vidioc_qbuf
videobuf_qbuf
q->ops->buf_prepare(q,buf,field)//调用驱动程序里面提供的函数做一些预处理工作
list_add_tail//把缓冲区放入队列的尾部
q->ops->buf_queue(q,buf)调用驱动程序里面提供的入队列函数
----------------------------------------------------------------------------------------------------------------
app : VIDIOC_STREAMON //启动
----------------------------------------------------------------------------------------------------------------
用select查询是否有数据(根据韦老大讲解的进行整理,内核不是3.4.2)
在驱动程序里面对应的是poll机制。
V4l2_poll
vdev->fops->poll(vivi_poll)
vivi_poll
videobuf_poll_stream
buf=list_entry(q->stream.next, struct videobuf_buffer,stream)//从队列的头部获得缓冲区
如果缓冲区里面没有数据的话,就调用poll_wait等待
poll_wait(file,&buf->done,wait)//在这里休眠
谁来产生数据,谁来唤醒它(在vivi.c中搜索done)
vivi_thread_tick
wake_up(&buf->vb.done)
唤醒进程:谁来调用vivi_thread_tick这个函数呢?
因为这里是一个虚拟的摄像头驱动程序,它会怎样产生数据呢?
如果是一个真实的摄像头的话,是硬件来产生数据的。但是在虚拟摄像头驱动里面,是用内核线程来产生数据的。
timeout = msecs_to_jiffies();
创建一个内核线程,每隔30ms就会执行一次,每次就会调用vivi_thread_tick(fh)来产生数据。在vivi_thread_tick()中会
调通过vivi_fillbuf(fh,buf)来构造数据。调完之后,又开始休眠schedule_timeout_interruptible(timeout)
---------------------------------------------------------------------------------
/*有数据后,从队列中取出缓冲区。有那么多缓冲区,app如何知道哪一个缓冲区有数据,
调用VIDIOC_DQBUF(根据韦老大讲解的进行整理,内核不是3.4.2)
app : VIDIOC_DQBUF
vidioc_dqbuf
/*在队列中获得有数据的缓冲区*/
retval = stream_next_buffer(q,&buf,nonblocking);
/*把它从队列中删掉*/
list_del(&buf->stream)
/*把缓冲区的状态返回给应用程序*/
videobuf_status(q,b,buf,q->type);
-------------------------------------------------------------------------------------------
应用程序根据VIDIOC_DQBUF所得到缓冲区的状态,知道哪一个缓冲区有数据,就去读对应的地址(该地址来自前面的mmap)
------------------------------------------------------------------------------------------
V4l2初识(七)-----------浅析app获取虚拟摄像头数据的过程的更多相关文章
- V4L2学习(五)VIVI虚拟摄像头驱动
概述 前面简单分析了内核中虚拟摄像头驱动 vivi 的框架与实现,本文参考 vivi 来写一个虚拟摄像头驱动,查询.设置视频格式相对简单,难点在于 vb2_buf 的处理过程. 数据采集流程分析 在我 ...
- 二十四、V4L2框架主要结构体分析和虚拟摄像头驱动编写
一.V4L2框架主要结构体分析 V4L2(video for linux version 2),是内核中视频设备的驱动框架,为上层访问视频设备提供统一接口. V4L2整体框架如下图: 图中主要包括两层 ...
- V4L2(二)虚拟摄像头驱动vivi深入分析【转】
转自:http://www.cnblogs.com/tureno/articles/6694463.html 转载于: http://blog.csdn.net/lizuobin2/article/d ...
- vivi虚拟摄像头驱动程序
一.vivi虚拟摄像头驱动 基于V4L2(video for linux 2)摄像头驱动程序,我们减去不需要的ioctl_fops的函数,只增加ioctl函数增加的必要的摄像头流查询等函数: #inc ...
- (二) V4L2引入(含浅析UVC)
title: V4L2引入(含浅析UVC) date: 2019/4/23 19:00:00 toc: true --- V4L2引入(含浅析UVC) 基本框架 V4L2全名是video for li ...
- FFmpeg获取DirectShow设备数据(摄像头,录屏)
这两天研究了FFmpeg获取DirectShow设备数据的方法,在此简单记录一下以作备忘.本文所述的方法主要是对应Windows平台的. 1. 列设备 ffmpeg -list_devic ...
- 【转】FFmpeg获取DirectShow设备数据(摄像头,录屏)
这两天研究了FFmpeg获取DirectShow设备数据的方法,在此简单记录一下以作备忘.本文所述的方法主要是对应Windows平台的. 1. 列设备 ffmpeg -list_devic ...
- directshow 虚拟摄像头 实例 代码解读
directshow 虚拟摄像头 实例 代码解读 本文只介绍这个源码的大致构成以及怎么修改,因为其他的我也不会啊哈哈哈,我就是用QQ调用虚拟摄像头读取我自己的视频或者图片播放给别人让别人以为这就是实时 ...
- Opencv+MFC获取摄像头数据,显示在Picture控件
分为两步:OpenCV获取摄像头数据+图像在Picture上显示 第一步:OpenCV获取摄像头数据 参考:http://www.cnblogs.com/epirus/archive/2012/06/ ...
随机推荐
- Html学习之五(嵌套之简单购物界面设计)
<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title> ...
- 201871010111-刘佳华《面向对象程序设计(java)》第十五周学习总结
201871010111-刘佳华<面向对象程序设计(java)>第十五周学习总结 实验十三 Swing图形界面组件(二) 实验时间 2019-12-6 第一部分:理论知识总结 5> ...
- python27期JavaScript:
JavaScript:(简称“JS”) 是一种轻量级的编程语言(ECMAscript5或6)是一种解释性脚本语言(代码不进行预编译)主要用来向HTML页面添加交互行为JavaScript 是互联网上最 ...
- 《为什么说 Prometheus 是足以取代 Zabbix 的监控神器?》
为什么说 Prometheus 是足以取代 Zabbix 的监控神器? Kuberneteschina 致力于提供最权威的 Kubernetes 技术.案例与Meetup! 关注他 12 人赞同 ...
- KPConv针对Modelnet40的分类
1. 训练样本airplane_0001.txt的可视化: 飞机尺度: 物体类别与对应标签: 2. 对训练样本进行降采样: 体素法降采样,降采样的网络大小设置为0.02m.在pycharm下面的Con ...
- go 接收发送文件
package main import ( "fmt" "os" "net" "io" ) //发送文件内容 func ...
- 代码问题【LDES//AAAI2019】
paper:Li Y, Zhu J, Hoi S C H, et al. Robust Estimation of Similarity Transformation for Visual Objec ...
- GC(二)CMS
什么是CMS CMS全称 Concurrent Mark Sweep,是一款并发的.使用标记-清除算法的垃圾回收器, 使用场景 GC过程短暂停,适合对时延要求较高的服务,用户线程不允许长时间的停顿. ...
- Window权限维持(一):注册表运行键
在红队行动中在网络中获得最初的立足点是一项耗时的任务.因此,持久性是红队成功运作的关键,这将使团队能够专注于目标,而不会失去与指挥和控制服务器的通信.在Windows登录期间创建将执行任意负载的注册表 ...
- 个性化你的 Git Log 的输出格式
个性化你的 Git Log 的输出格式