【STM32H7教程】第28章 STM32H7时间关键代码在ITCM执行的超简单方法
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第28章 STM32H7时间关键代码在ITCM执行的超简单方法
本章教程为大家分享一种时间关键代码在ITCM执行的简单方法,同时中断向量表和变量放DTCM。
28.1 初学者重要提示
28.2 简单实现方法
28.3 实验例程说明(MDK)
28.4 总结
28.1 初学者重要提示
- 学习本章节前,务必优先学习第25章,了解TCM,SRAM等五块内存区的基础知识,比较重要。
- TCM : Tightly-Coupled Memory 紧密耦合内存 。ITCM用于指令,DTCM用于数据,特点是跟内核速度一样(400MHz),而片上RAM的速度基本都达不到这个速度(200MHz)。很多时候我们希望将需要实时性的程序和变量分别放在ITCM和DTCM里面执行,本章就是解决这个问题。
- 实现方法比较简单,基于MDK的Option选项设置下即可,无需操作分散加载。使用分散加载的好处是灵活,在设置复杂工程的内存映射方面比较方便。
- 实现这个功能的关键是要把所有程序都下载到Flash,系统上电后让MDK中的库函数去将所需的程序加载到RAM里面,用户不要自己去加载,太麻烦。如果用户自己去加载就得搞个bootloader加载应用程序到ITCM。这里所说的库函数是MDK里面的__main封装起来了。
28.2 简单实现方法
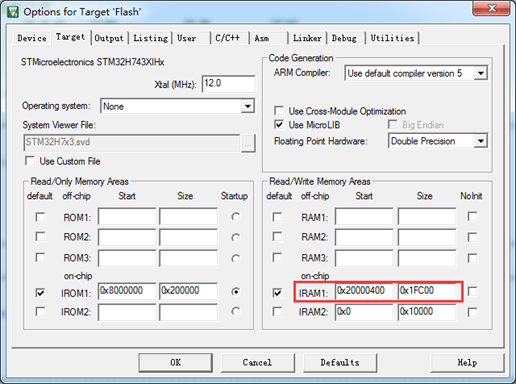
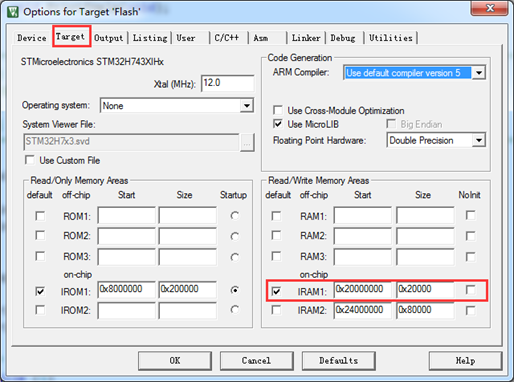
28.2.1 第1步,设置DTCM
设置DTCM空间,前0x400大小的空间用于中断向量表,所以这里从0x20000400开始,用于各种变量需求:
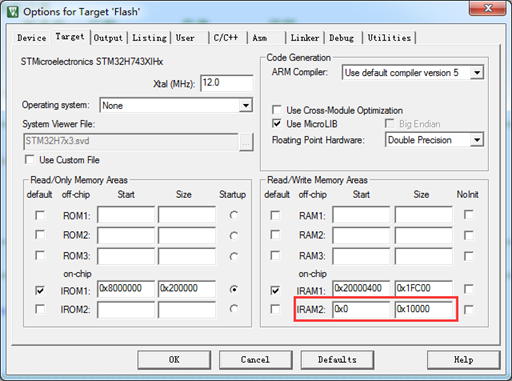
28.2.2 第2步,添加ITCM
ITCM的首地址是0x0000 0000,大小64KB:
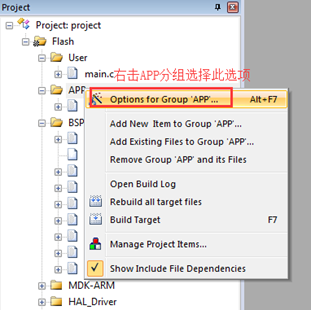
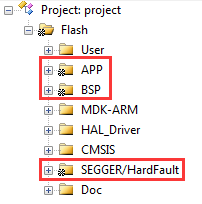
28.2.3 第3步,选择在ITCM执行的代码
右击MDK分组,选择使用ITCM,这里设置了APP分组、BSP分组和SEGGER/HardFault分组。
以APP分组为例,设置方法如下:
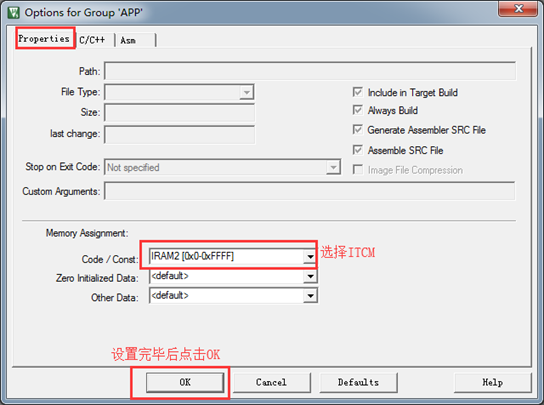
BSP分组和SEGGER/HardFault分组也设置完毕后,可以看到小雪花标识
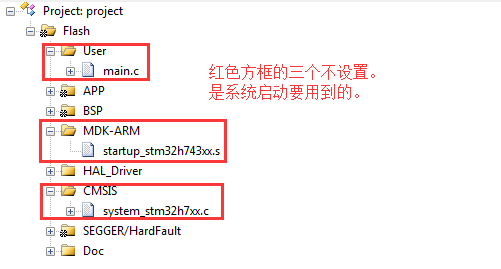
而进入main函数之前的所有代码,含main函数所在的文件main.c切不要设置,这个之前的代码我们都需要在flash里面执行。这些代码仅执行一次以后不会执行,所以不用管他们,之后的所有代码都可以放在ITCM里面。
28.2.4 第4步,复制中断向量表到DTCM
前面三步设置完毕后,将中断向量表从flash中复制到DTCM,主要存储的DTCM地址要0x200对齐。
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: 标准c程序入口。
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
int main(void)
{
uint32_t *SouceAddr = (uint32_t *)FLASH_BANK1_BASE;
uint32_t *DestAddr = (uint32_t *)D1_DTCMRAM_BASE; memcpy(DestAddr, SouceAddr, 0x400); /* 设置中断向量表到ITCM里面 */
SCB->VTOR = D1_DTCMRAM_BASE; MainRAM();
}
至此就设置完毕了,另外注意以下两点:
- 不限制设置分组,单独设置一个C文件也是可以的。
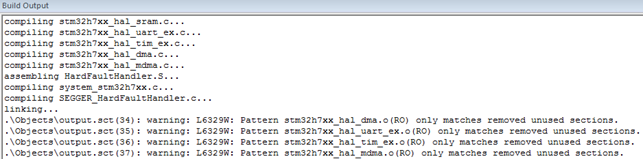
- 如果大家将HAL_Driver分组也放在了ITCM里面,会有如下警告,这个不用管,是删除了冗余函数。
28.3 实验例程说明(MDK)
配套例子:
V7-007_时间关键代码在ITCM执行的超简单方法
实验目的:
- 学习时间关键代码在ITCM执行的超简单方法,同时中断向量表和变量放DTCM。
实验内容:
- 系统上电后驱动了1个软件定时器,每100ms翻转一次LED2。
- 启动1个TIM6周期性中断,频率10KHz,在中断服务程序里面翻转FMC扩展引脚20和23。
实验操作:
- K1按键按下,开启TIM6的周期性中断。
- K2按键按下,关闭TIM6的周期性中断。
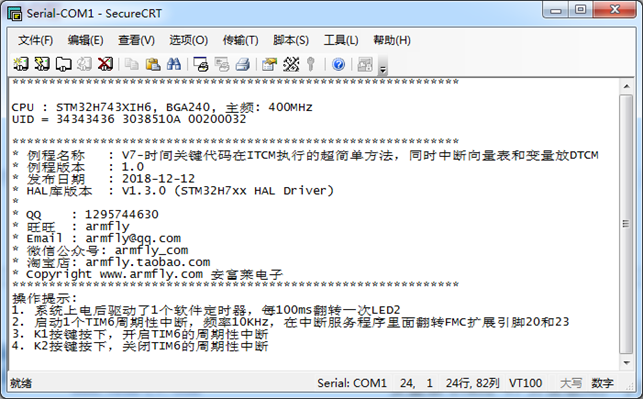
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
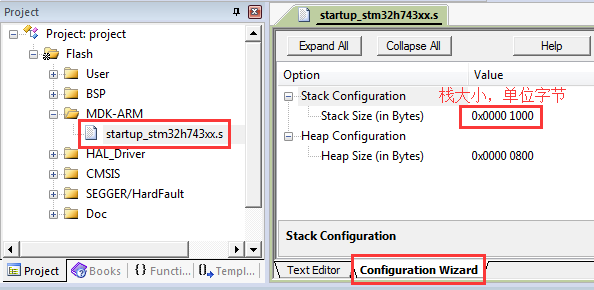
系统栈大小分配:
RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config(); /* 使能L1 Cache */
CPU_CACHE_Enable(); /*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init(); /*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config(); /*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */
HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
} /*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache(); /* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主程序实现如下操作:
- 系统上电后驱动了1个软件定时器,每100ms翻转一次LED2。
- 启动1个TIM6周期性中断,频率10KHz,在中断服务程序里面翻转FMC扩展引脚20和23。
- K1按键按下,开启TIM6的周期性中断。
- K2按键按下,关闭TIM6的周期性中断。
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: 标准c程序入口。
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
int main(void)
{
uint32_t *SouceAddr = (uint32_t *)FLASH_BANK1_BASE;
uint32_t *DestAddr = (uint32_t *)D1_DTCMRAM_BASE; memcpy(DestAddr, SouceAddr, 0x400); /* 设置中断向量表到ITCM里面 */
SCB->VTOR = D1_DTCMRAM_BASE; MainRAM();
} /*
*********************************************************************************************************
* 函 数 名: MainRAM
* 功能说明: c程序入口
* 形 参: 无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int MainRAM(void)
{
uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */
PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(, ); /* 启动1个100ms的自动重装的定时器 */ bsp_SetTIMforInt(TIM6, , , ); /* 设置为10KHz频率定时器中断*/ /* 进入主程序循环体 */
while ()
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔100ms 进来一次 */
bsp_LedToggle();
} /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下,开启TIM6的周期性中断*/
TIM6->DIER |= TIM_IT_UPDATE;
break; case KEY_DOWN_K2: /* K2键按下,关闭TIM6的周期性中断*/
TIM6->DIER &= ~TIM_IT_UPDATE;
break; default:
/* 其它的键值不处理 */
break;
}
}
}
} /*
*********************************************************************************************************
* 函 数 名: TIM6_DAC_IRQHandler
* 功能说明: TIM6定时中断服务程序
* 返 回 值: 无
*********************************************************************************************************
*/
void TIM6_DAC_IRQHandler(void)
{
if((TIM6->SR & TIM_FLAG_UPDATE) != RESET)
{
/* 清除更新标志 */
TIM6->SR = ~ TIM_FLAG_UPDATE; /* 翻转FMC扩展引脚20和23脚 */
HC574_TogglePin(GPIO_PIN_23);
HC574_TogglePin(GPIO_PIN_20);
}
}
28.4 总结
本章节就为大家交流这么多,对速度有要求的应用部分,建议使用ITCM和DTCM来达到最高性能。
【STM32H7教程】第28章 STM32H7时间关键代码在ITCM执行的超简单方法的更多相关文章
- 【STM32H7教程】第8章 STM32H7的终极调试组件Event Recorder
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第8章 STM32H7的终极调试组件Event Re ...
- 【STM32H7教程】第22章 STM32H7的SysTick实现多组软件定时器
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第22章 STM32H7的SysTick实现 ...
- 【STM32H7教程】第34章 STM32H7的定时器应用之TIM1-TIM17的PWM实现
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第34章 STM32H7的定时器应用之TIM1-T ...
- 【STM32H7教程】第58章 STM32H7的硬件JPEG应用之图片解码显示
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第58章 STM32H7的硬件JPEG应用之图片解 ...
- 【STM32H7教程】第56章 STM32H7的DMA2D应用之刷色块,位图和Alpha混合
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第56章 STM32H7的DMA2D应用之刷色块, ...
- 【STM32H7教程】第48章 STM32H7的FMC总线应用之是32路高速IO扩展
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第48章 STM32H7的FMC总线应用之是32路 ...
- 【STM32H7教程】第12章 STM32H7的HAL库框架设计学习
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第12章 STM32H7的HAL库框架设计学 ...
- 【STM32H7教程】第14章 STM32H7的电源,复位和时钟系统
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第14章 STM32H7的电源,复位和时钟系 ...
- 【STM32H7教程】第33章 STM32H7的定时器应用之TIM1-TIM17的中断实现
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第33章 STM32H7的定时器应用之TIM1-T ...
随机推荐
- ActiveMQ下载与安装(消息中间件JMS)
下载 官方网站下载:http://activemq.apache.org/ 1.3.2安装(Linux) (1)将apache-activemq-5.12.0-bin.tar.gz 上传至服务器 (2 ...
- SolrCloud 高可用集群搭建
1.1 什么是SolrCloud SolrCloud(solr 云)是Solr提供的分布式搜索方案,当你需要大规模,容错,分布式索引和检索能力时使用 SolrCloud.当一个系统的索引数据量少的时候 ...
- Redis和MongoDB区别
MongoDB 更类似 MySQL,支持字段索引.游标操作,其优势在于查询功能比较强大,擅长查询 JSON 数据,能存储海量数据,但是不支持事务.Redis 是一个开源(BSD许可)的,内存中的数据结 ...
- 原创【cocos2d-x】CCMenuItemToggle 在lua中的使用
说明:1,所使用的cocos2dx版本为2.1.3 ;09:48:05 2,本人仍是在学习中的小菜鸟,此博客只是为了记录我学习过程中的点滴,同时也希望同样lua开发的童鞋,一起交流: 3,本人whj0 ...
- ospf邻居建立过程
1. hello报文的作用 邻居发现:自动发现邻居路由器. 邻居建立:完成Hello报文中的参数协商,建立邻居关系. 邻居保持:通过Keepalive机制,检测邻居运行状态. hello报文的发送时间 ...
- 23.login1(SKCTF)
没有账号?注册一个试一试~ 题目提示用SQL约束攻击,那么什么是SQL约束攻击呢? 约束攻击的原理就是注册用户名为'admin '(有多个空格)的账号,密码'*******'(密码可以自定义,符 ...
- 剑指Offer-40.数组中只出现一次的数字(C++/Java)
题目: 一个整型数组里除了两个数字之外,其他的数字都出现了两次.请写程序找出这两个只出现一次的数字. 分析: 我们知道,两个相同的数字异或的结果等于0,所以利用这个性质将数组中所有的数字异或,求得的结 ...
- 几行代码轻松实现PHP文件打包下载zip
<?php //获取文件列表 function list_dir($dir){ $result = array(); if (is_dir($dir)){ $file_dir = scandir ...
- 【洛谷5644】[PKUWC2018] 猎人杀(容斥+生成函数+分治NTT)
点此看题面 大致题意: 有\(n\)个人相互开枪,每个人有一个仇恨度\(a_i\),每个人死后会开枪再打死另一个还活着的人,且第一枪由你打响.设当前剩余人仇恨度总和为\(k\),则每个人被打中的概率为 ...
- Python爬虫基础——HTML、CSS、JavaScript、JQuery网页前端技术
一.HTML HTML是Hyper Text Markup Language(超文本标记语言)的缩写. HTML不是一种编程语言,而是标记语言. HTML的语法 双标签: 单标签: HTML的元素和属 ...