python_MachineLearning_感知机PLA
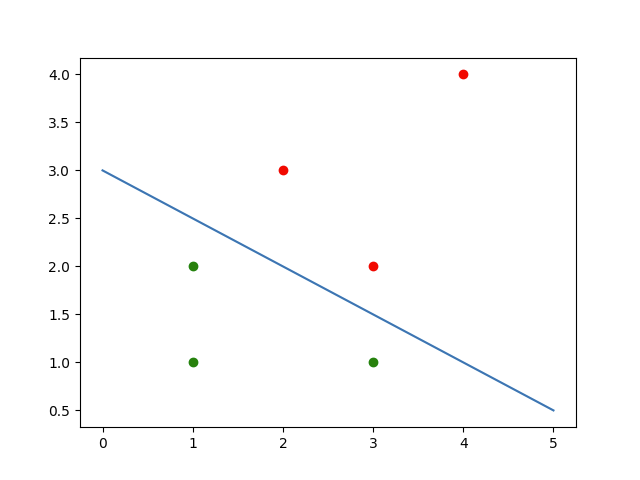
感知机(perceptron)是二类分类的线性模型,其输入为实例的特征向量,输出为实例的类别,取+1和-1二值。感知机对应于输入空间(特征空间)中将实例划分为正负两类的分离超平面,属于判别模型。感知机学习旨在求出将训练数据进行线性划分的分离超平面,为此,导入基于误差分类的损失函数,利用梯度下降法对损失函数进行极小化,求得感知机模型。
import numpy as np
import matplotlib.pyplot as plt datafile = open('data.txt') xx = []
yy = [] #read data from file
line = datafile.readline()
while line:
p = line.split()
print(p)
xx.append((1, float(p[0]), float(p[1])))
yy.append(int(p[2]))
line = datafile.readline() print(xx)
print(yy)
xx_arr = np.array(xx) #numpy的array,相当于向量,可用于运算
yy_arr = np.array(yy) w = np.array([1, 0, 0])
delta = 1 for i in range(100):
false = -1
for j in range(len(xx_arr)):
if int(yy_arr[j]) != np.sign(np.dot(w, xx_arr[j])): #numpy.dot求两向量内积
false = j
break
if false == -1:
break
w = w + delta * yy_arr[false] * xx_arr[false] #更新w向量 #使用matplotlib.pyplot绘制函数
line_x1 = np.linspace(0,5,50) #生成[0,5]之间均匀分布的50个x1
line_x2 = [(-w[1]*x-w[0])/w[2] for x in line_x1] #每个x1对应的x2
plt.plot(line_x1,line_x2) #使用matplotlib.pyplot绘制点
for i in range(len(xx_arr)):
if yy_arr[i] == 1:
plt.plot(float(xx_arr[i][1]), float(xx_arr[i][2]),'go')
else:
plt.plot(float(xx_arr[i][1]), float(xx_arr[i][2]), 'ro') plt.show()
python_MachineLearning_感知机PLA的更多相关文章
- 机器学习理论基础学习3.1--- Linear classification 线性分类之感知机PLA(Percetron Learning Algorithm)
一.感知机(Perception) 1.1 原理: 感知机是二分类的线性模型,其输入是实例的特征向量,输出的是事例的类别,分别是+1和-1,属于判别模型. 假设训练数据集是线性可分的,感知机学习的目标 ...
- 感知机PLA算法实现[转载]
转自:https://blog.csdn.net/u010626937/article/details/72896144#commentBox 1.实现原始形式 import numpy as np ...
- Python实现PLA(感知机)
Python实现PLA(感知机) 运行环境 Pyhton3 numpy(科学计算包) matplotlib(画图所需,不画图可不必) 计算过程 st=>start: 开始 e=>end o ...
- 感知机学习算法(PLA)
Perception Learning Algorithm, PLA 1.感知机 感知机是一种线性分类模型,属于判别模型. 感知机模型给出了由输入空间到输出空间的映射: f(X) = sign(WTX ...
- 机器学习---用python实现感知机算法和口袋算法(Machine Learning PLA Pocket Algorithm Application)
之前在<机器学习---感知机(Machine Learning Perceptron)>一文中介绍了感知机算法的理论知识,现在让我们来实践一下. 有两个数据文件:data1和data2,分 ...
- 感知机算法(PLA)代码实现
目录 1. 引言 2. 载入库和数据处理 3. 感知机的原始形式 4. 感知机的对偶形式 5. 多分类情况-one vs. rest 6. 多分类情况-one vs. one 7. sklearn实现 ...
- 【机器学习】感知机学习算法(PLA)
感知机问题学习算法引入:信用卡问题 根据已知数据(不同标准的人的信用评级)训练后得出一个能不能给新客户发放信用卡的评定结果 解决该问题的核心思想扔为之前所讲到的梯度下降算法,对于更多条件的类似问题,首 ...
- 感知器算法PLA
for batch&supervised binary classfication,g≈f <=> Eout(g)≥0 achieved through Eout(g)≈Ein(g ...
- Perceptron Learning Algorithm (PLA)
Perceptron - 感知机,是一种二元线性分类器,它通过对特征向量的加权求和,并把这个”和”与事先设定的门槛值(threshold)做比较,高于门槛值的输出1,低于门槛值的输出-1.其中sign ...
随机推荐
- javascript函数参数、返回值类型检查
实现带参数.返回值类型声明的js函数: 类型定义:window.Str = Type.Str = Type.define('STRING', Type.isStr);var Per = Type.de ...
- 【FFT初识】
FFT在用于解决多项式乘法A*B(A和B为多项式,形如a0+a1*x^1+a2*x^2....)的时候,通俗地解释就是: 原理:先根据各自的系数各自转化为对应的向量(O(nlogn)),然后向量相 ...
- mongoDB 安全权限访问控制
MongoDB3.0权限 https://blog.csdn.net/leonzhouwei/article/details/46564141 转自:http://ibruce.info/2015/0 ...
- AutoIT: 通过页面抓取来陈列任务管理器里面所有进程的列表
#include<Array.au3> $handle =WinGetHandle("Windows 任务管理器") ;$ctrl =ControlGetHandle( ...
- Image2Caption
定义 图像标注或语言生成图像问题把计算机视觉与自然语言处理联系在了一起,是广义的人工智能领域的一大难题.通常涉及到特征提取(用cnn提取出图像内部不为人类感知的向量特征)和语言模型建立.为图像提取文字 ...
- bzoj1756
1756: Vijos1083 小白逛公园 Time Limit: 10 Sec Memory Limit: 64 MBSubmit: 1150 Solved: 371[Submit][Statu ...
- 表单中的readOnly 和disabled
readonly和Disabled是用在表单中的两个属性,它们都能够做到使用户不能够更改表单域中的内容.但是它们之间有着微小的差别,总结如下: disabled也可以禁用按钮和链接: <butt ...
- python 高阶函数二 map()和reduce()
一.map()函数 map()函数接收两个参数,一个是函数,一个是Iterable,map将传入的函数依次作用到序列的每个元素,并把结果作为新的Iterator返回. >>> fro ...
- 洛谷 P3732 [HAOI2017]供给侧改革【trie树】
参考:http://blog.csdn.net/di4covery/article/details/73065684 我以为是后缀数组+某某数据结构,结果居然是01trie!!题解说"因为是 ...
- Phpstorm安装和优化
Phpstorm是php开发一个强大的IDE,但是它不是免费的需要注册码,而且界面是英文界面,对英文不太好的人有点不友好.所以这篇文章主要从phpstorm的破解和汉化来优化phpstorm. 1.首 ...