ROS-TF-新建坐标系
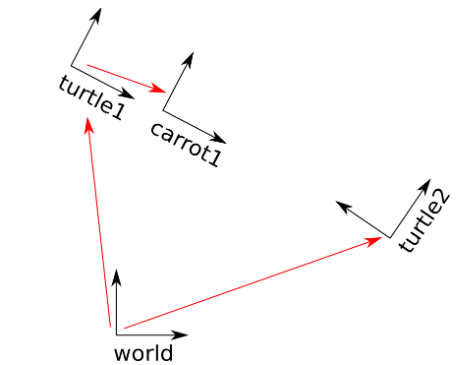
前言:在前面的试验中,我们分别有wolrd,turtle1和turtle2三个坐标系,并且world是turtle1和turtle2的父坐标系。现在我们来新建一个自定义坐标系,让turtle2跟着新的坐标系”carrot“运动。
参考自:http://wiki.ros.org/tf/Tutorials/Adding%20a%20frame%20%28C%2B%2B%29
一、新建源文件
新建frame_tf_broadcaster.cpp文件,内容如下:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok()){
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );//设置新坐标系相对位置关系
transform.setRotation( tf::Quaternion(, , , ) );//设置新坐标系相对旋转关系
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));//创建一个新坐标系carrot1,距离父坐标系turtle1距离2米
rate.sleep();
}
;
};
二、修改launch文件
在launch文件中添加代码:
<launch>
...
<node pkg="learning_tf" type="frame_tf_broadcaster"
name="broadcaster_frame" />
</launch>
三、修改广播信息
修改turtle_tf_listener.cpp文件
listener.lookupTransform(), transform);
四、运行
编译并运行launch文件
roslaunch learning_tf start_demo.launch
现在turtle2始终跟随在carrot坐标系运动。
-END-
ROS-TF-新建坐标系的更多相关文章
- ROS tf-增加坐标系
博客参考:https://www.ncnynl.com/archives/201702/1312.html ROS与C++入门教程-tf-增加坐标系 说明: 介绍如何为TF增加额外固定的坐标系 为何增 ...
- ROS tf监听编写
博客转载自:https://www.ncnynl.com/archives/201702/1311.html ROS与C++入门教程-tf-编写tf listener(监听) 说明: 介绍如何使用tf ...
- QT插件+ROS 2 新建项目
一QT插件开发ROS,http://www.ncnynl.com/archives/201701/1277.html 二QT开发遇到问题http://blog.csdn.net/u013453604/ ...
- ROS tf广播编写
博客参考:https://www.ncnynl.com/archives/201702/1310.html ROS与C++入门教程-tf-编写tf broadcaster(广播) 说明: 介绍如何广播 ...
- ROS tf 编程指南
ROS (Robot Operating System, 机器人操作系统)是最知名的机器人操作系统,广泛应用于无人驾驶和机器人,tf(transforms,坐标系转换)是ROS下的一个常用的工具库.r ...
- ROS tf基础使用知识
博客参考:https://www.ncnynl.com/archives/201702/1306.html ROS与C++入门教程-tf-坐标变换 说明: 介绍在c++实现TF的坐标变换 概念: Co ...
- ROS TF——learning tf
在机器人的控制中,坐标系统是非常重要的,在ROS使用tf软件库进行坐标转换. 相关链接:http://www.ros.org/wiki/tf/Tutorials#Learning_tf 一.tf简介 ...
- ROS tf
一.节点中使用(cpp,python) 1. ros wiki 提供的tutorials 2. https://blog.csdn.net/start_from_scratch/article/det ...
- ROS tf 两个常用的函数
/** \brief Get the transform between two frames by frame ID. * \param target_frame The frame to wh ...
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)
ROS Indigo learning_tf-01 坐标系变换(tf)广播员 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu ...
随机推荐
- [SQL Service] 时间处理:获取今天的00:00:00/获取今天的23:59:59
获取今天的00:00:00 SELECT CONVERT(DATETIME,CONVERT(VARCHAR(10),GETDATE(),120)) 获取今天的23:59:59 1.SELECT DAT ...
- Python学习【第7篇】:Python之常用模块2
hashlib,configparser,logging模块 一.常用模块二 hashlib模块 hashlib提供了常见的摘要算法,如md5和sha1等等. 那么什么是摘要算法呢?摘要算法又称为哈希 ...
- 几校联考——day1题解
T1 约数的个数(好像不可提交) 如果一个整数a能够整除整数b,那么a叫做b的约数.现在有N(1 <= N <= 100,000)个整数,对于其中的每一个数,请找出它在其余N - 1个整数 ...
- THUSC2019 退役记
Day -inf 这一个半月潜心搞文化课,把文化课的坑填上了不少,我文化课的底子真是薄啊 一年前没想过我还挺有希望进队的,最后还差点冲上 一年后说不定会发现我搞文化课也能搞得不错呢? 一切都是未知 t ...
- Vim+xxd=强大的十六进制编辑器
Vim 是黑客文化中强大的编辑器.利用它调用外部十六进制文件显示命令xxd就可以顺利的编辑二进制文件了. 其中,%在vimComandLine时代表当前文件的路径,xxd是以十六进制显示一个文件,xx ...
- php表单常用正则表达式
<?php /** * @description: 正则表达式匹配 */ class Regex { /** * @手机号 */ public static function Phone($su ...
- MVC.NET:提供对字体文件.woff的访问
在我们的项目中如果使用到了Bootstrap框架的话,通常都必须要支持对其自带的glyphicons-halflings-regular的font文件的访问. 诸如在MVC.NET中,如果一开始什么设 ...
- Java单元測试工具JUnit 5新特性一览
Java单元測试工具JUnit 5新特性一览 作者:chszs,未经博主同意不得转载. 经许可的转载需注明作者和博客主页:http://blog.csdn.net/chszs JUnit是最流行的开源 ...
- Hard模式题目
先过一下Hard模式的题目吧. # Title Editorial Acceptance Difficulty Frequency . 65 Valid Number 12.6% Ha ...
- 将XML文件转化成NSData对象
NSData *xmlData = [[NSData alloc]initWithContentsOfFile:[NSString stringWithFormat:@"%@/People. ...