ROS-TF-新建坐标系
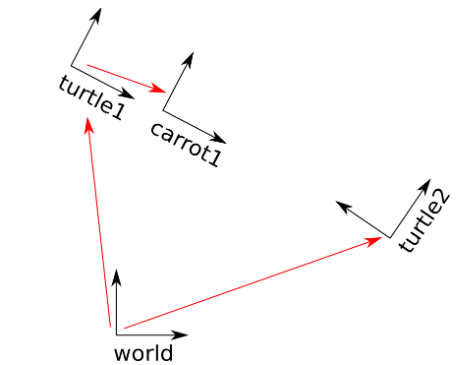
前言:在前面的试验中,我们分别有wolrd,turtle1和turtle2三个坐标系,并且world是turtle1和turtle2的父坐标系。现在我们来新建一个自定义坐标系,让turtle2跟着新的坐标系”carrot“运动。
参考自:http://wiki.ros.org/tf/Tutorials/Adding%20a%20frame%20%28C%2B%2B%29
一、新建源文件
新建frame_tf_broadcaster.cpp文件,内容如下:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok()){
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );//设置新坐标系相对位置关系
transform.setRotation( tf::Quaternion(, , , ) );//设置新坐标系相对旋转关系
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));//创建一个新坐标系carrot1,距离父坐标系turtle1距离2米
rate.sleep();
}
;
};
二、修改launch文件
在launch文件中添加代码:
<launch>
...
<node pkg="learning_tf" type="frame_tf_broadcaster"
name="broadcaster_frame" />
</launch>
三、修改广播信息
修改turtle_tf_listener.cpp文件
listener.lookupTransform(), transform);
四、运行
编译并运行launch文件
roslaunch learning_tf start_demo.launch
现在turtle2始终跟随在carrot坐标系运动。
-END-
ROS-TF-新建坐标系的更多相关文章
- ROS tf-增加坐标系
博客参考:https://www.ncnynl.com/archives/201702/1312.html ROS与C++入门教程-tf-增加坐标系 说明: 介绍如何为TF增加额外固定的坐标系 为何增 ...
- ROS tf监听编写
博客转载自:https://www.ncnynl.com/archives/201702/1311.html ROS与C++入门教程-tf-编写tf listener(监听) 说明: 介绍如何使用tf ...
- QT插件+ROS 2 新建项目
一QT插件开发ROS,http://www.ncnynl.com/archives/201701/1277.html 二QT开发遇到问题http://blog.csdn.net/u013453604/ ...
- ROS tf广播编写
博客参考:https://www.ncnynl.com/archives/201702/1310.html ROS与C++入门教程-tf-编写tf broadcaster(广播) 说明: 介绍如何广播 ...
- ROS tf 编程指南
ROS (Robot Operating System, 机器人操作系统)是最知名的机器人操作系统,广泛应用于无人驾驶和机器人,tf(transforms,坐标系转换)是ROS下的一个常用的工具库.r ...
- ROS tf基础使用知识
博客参考:https://www.ncnynl.com/archives/201702/1306.html ROS与C++入门教程-tf-坐标变换 说明: 介绍在c++实现TF的坐标变换 概念: Co ...
- ROS TF——learning tf
在机器人的控制中,坐标系统是非常重要的,在ROS使用tf软件库进行坐标转换. 相关链接:http://www.ros.org/wiki/tf/Tutorials#Learning_tf 一.tf简介 ...
- ROS tf
一.节点中使用(cpp,python) 1. ros wiki 提供的tutorials 2. https://blog.csdn.net/start_from_scratch/article/det ...
- ROS tf 两个常用的函数
/** \brief Get the transform between two frames by frame ID. * \param target_frame The frame to wh ...
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)
ROS Indigo learning_tf-01 坐标系变换(tf)广播员 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu ...
随机推荐
- Linux内核系统调用处理过程
原创作品转载请注明出处 + https://github.com/mengning/linuxkernel/ 学号末三位:168 下载并编译Linux5.0 xz -d linux-.tar.xz . ...
- select 多选 和单选,分组
<select name="group"> <option value="1">北京</option> <option ...
- [Luogu] P3907 圈的异或
题目描述 给出无向图G,边 (Ai,Bi)的权是Ci,判断下列性质是否成立: 对于任意圈C,其边权的异或和是0 输入输出格式 输入格式: 第1 行,1 个整数T,表示数据的组数. 每组数据第1 行,2 ...
- LIS(两种方法求最长上升子序列)
首先得明白一个概念:子序列不一定是连续的,可以是断开的. 有两种写法: 一.动态规划写法 复杂度:O(n^2) 代码: #include <iostream> #include <q ...
- 00.模块1.模块(Module)和包(Package)
转自廖雪峰老师官方网站 在计算机程序的开发过程中,随着程序代码越写越多,在一个文件里代码就会越来越长,越来越不容易维护. 为了编写可维护的代码,我们把很多函数分组,分别放到不同的文件里,这样,每个文件 ...
- Eclipse中使用struts标签时出错
原因是Action和ActionForm对应文件中没有继承相应的类,具体来说: ActionForm的编写: 必须继承org.apache.struts.action.ActionForm Actio ...
- 【Mail.Ru Cup 2018 Round 2 A】 Metro
[链接] 我是链接,点我呀:) [题意] [题解] 1:一直往右走的情况. 2:中间某个地方中转 (不会出现超过1次的转弯. (如果超过了和1次是等价的 [代码] #include <bits/ ...
- oracle 增量备份恢复策略(基础知识)
EXP和IMP是Oracle提供的一种逻辑备份工具.逻辑备份创建数据库对 象的逻辑拷贝并存入一个二进制转储文件.这种逻辑备份需要在数据库启动的情况下使用, 其导出实质就是读取一个数据库记录集(甚至可以 ...
- saprk里面的action - aggregate
上一篇讲到了spark里面的action函数: Action列表: reduce collect count first take takeSample takeOrdered saveAsTextF ...
- ubuntu 关于sublime text3的一些应用
安装 如今能够通过ppa的方法来安装sublime text3 了,个人感觉就是有有点儿慢,毕竟要update一下. sudo add-apt-repository ppa:webupd8team/s ...