Opencv 张正友相机标定傻瓜教程
注: 程序所用的OpenCV版本是 2.4.10 ,3.0以上的版本可能会有不同
先贴一下完整的工程代码:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
void main()
{
ifstream fin("calibdata.txt"); /* 标定所用图像文件的路径 */
ofstream fout("caliberation_result.txt"); /* 保存标定结果的文件 */
//读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
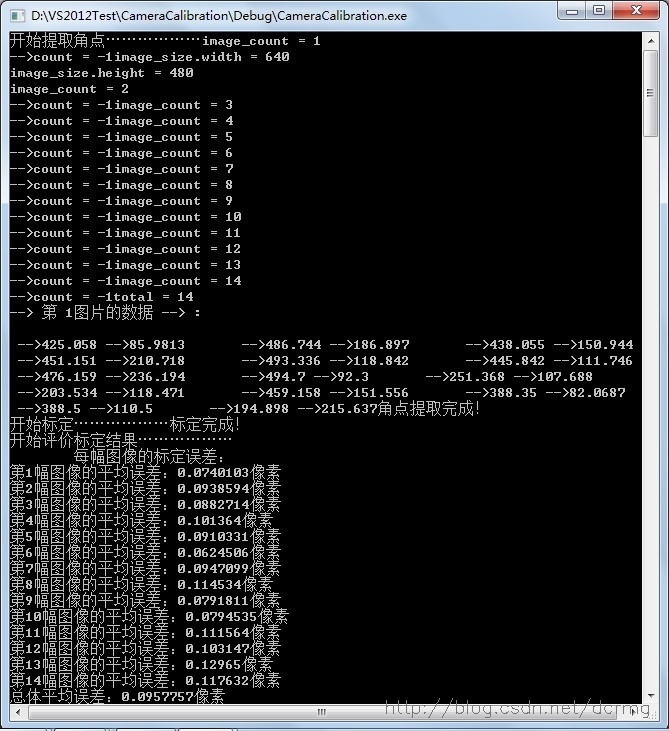
cout<<"开始提取角点………………";
int image_count=0; /* 图像数量 */
Size image_size; /* 图像的尺寸 */
Size board_size = Size(4,6); /* 标定板上每行、列的角点数 */
vector<Point2f> image_points_buf; /* 缓存每幅图像上检测到的角点 */
vector<vector<Point2f>> image_points_seq; /* 保存检测到的所有角点 */
string filename;
int count= -1 ;//用于存储角点个数。
while (getline(fin,filename))
{
image_count++;
// 用于观察检验输出
cout<<"image_count = "<<image_count<<endl;
/* 输出检验*/
cout<<"-->count = "<<count;
Mat imageInput=imread(filename);
if (image_count == 1) //读入第一张图片时获取图像宽高信息
{
image_size.width = imageInput.cols;
image_size.height =imageInput.rows;
cout<<"image_size.width = "<<image_size.width<<endl;
cout<<"image_size.height = "<<image_size.height<<endl;
}
/* 提取角点 */
if (0 == findChessboardCorners(imageInput,board_size,image_points_buf))
{
cout<<"can not find chessboard corners!\n"; //找不到角点
exit(1);
}
else
{
Mat view_gray;
cvtColor(imageInput,view_gray,CV_RGB2GRAY);
/* 亚像素精确化 */
find4QuadCornerSubpix(view_gray,image_points_buf,Size(11,11)); //对粗提取的角点进行精确化
image_points_seq.push_back(image_points_buf); //保存亚像素角点
/* 在图像上显示角点位置 */
drawChessboardCorners(view_gray,board_size,image_points_buf,true); //用于在图片中标记角点
imshow("Camera Calibration",view_gray);//显示图片
waitKey(500);//暂停0.5S
}
}
int total = image_points_seq.size();
cout<<"total = "<<total<<endl;
int CornerNum=board_size.width*board_size.height; //每张图片上总的角点数
for (int ii=0 ; ii<total ;ii++)
{
if (0 == ii%CornerNum)// 24 是每幅图片的角点个数。此判断语句是为了输出 图片号,便于控制台观看
{
int i = -1;
i = ii/CornerNum;
int j=i+1;
cout<<"--> 第 "<<j <<"图片的数据 --> : "<<endl;
}
if (0 == ii%3) // 此判断语句,格式化输出,便于控制台查看
{
cout<<endl;
}
else
{
cout.width(10);
}
//输出所有的角点
cout<<" -->"<<image_points_seq[ii][0].x;
cout<<" -->"<<image_points_seq[ii][0].y;
}
cout<<"角点提取完成!\n";
//以下是摄像机标定
cout<<"开始标定………………";
/*棋盘三维信息*/
Size square_size = Size(10,10); /* 实际测量得到的标定板上每个棋盘格的大小 */
vector<vector<Point3f>> object_points; /* 保存标定板上角点的三维坐标 */
/*内外参数*/
Mat cameraMatrix=Mat(3,3,CV_32FC1,Scalar::all(0)); /* 摄像机内参数矩阵 */
vector<int> point_counts; // 每幅图像中角点的数量
Mat distCoeffs=Mat(1,5,CV_32FC1,Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
vector<Mat> tvecsMat; /* 每幅图像的旋转向量 */
vector<Mat> rvecsMat; /* 每幅图像的平移向量 */
/* 初始化标定板上角点的三维坐标 */
int i,j,t;
for (t=0;t<image_count;t++)
{
vector<Point3f> tempPointSet;
for (i=0;i<board_size.height;i++)
{
for (j=0;j<board_size.width;j++)
{
Point3f realPoint;
/* 假设标定板放在世界坐标系中z=0的平面上 */
realPoint.x = i*square_size.width;
realPoint.y = j*square_size.height;
realPoint.z = 0;
tempPointSet.push_back(realPoint);
}
}
object_points.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,假定每幅图像中都可以看到完整的标定板 */
for (i=0;i<image_count;i++)
{
point_counts.push_back(board_size.width*board_size.height);
}
/* 开始标定 */
calibrateCamera(object_points,image_points_seq,image_size,cameraMatrix,distCoeffs,rvecsMat,tvecsMat,0);
cout<<"标定完成!\n";
//对标定结果进行评价
cout<<"开始评价标定结果………………\n";
double total_err = 0.0; /* 所有图像的平均误差的总和 */
double err = 0.0; /* 每幅图像的平均误差 */
vector<Point2f> image_points2; /* 保存重新计算得到的投影点 */
cout<<"\t每幅图像的标定误差:\n";
fout<<"每幅图像的标定误差:\n";
for (i=0;i<image_count;i++)
{
vector<Point3f> tempPointSet=object_points[i];
/* 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 */
projectPoints(tempPointSet,rvecsMat[i],tvecsMat[i],cameraMatrix,distCoeffs,image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector<Point2f> tempImagePoint = image_points_seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (int j = 0 ; j < tempImagePoint.size(); j++)
{
image_points2Mat.at<Vec2f>(0,j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at<Vec2f>(0,j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
std::cout<<"第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<endl;
fout<<"第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<endl;
}
std::cout<<"总体平均误差:"<<total_err/image_count<<"像素"<<endl;
fout<<"总体平均误差:"<<total_err/image_count<<"像素"<<endl<<endl;
std::cout<<"评价完成!"<<endl;
//保存定标结果
std::cout<<"开始保存定标结果………………"<<endl;
Mat rotation_matrix = Mat(3,3,CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
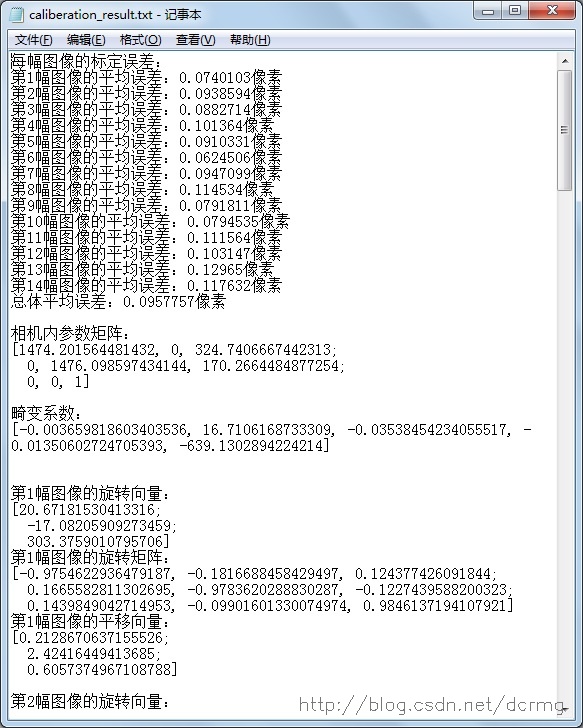
fout<<"相机内参数矩阵:"<<endl;
fout<<cameraMatrix<<endl<<endl;
fout<<"畸变系数:\n";
fout<<distCoeffs<<endl<<endl<<endl;
for (int i=0; i<image_count; i++)
{
fout<<"第"<<i+1<<"幅图像的旋转向量:"<<endl;
fout<<tvecsMat[i]<<endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(tvecsMat[i],rotation_matrix);
fout<<"第"<<i+1<<"幅图像的旋转矩阵:"<<endl;
fout<<rotation_matrix<<endl;
fout<<"第"<<i+1<<"幅图像的平移向量:"<<endl;
fout<<rvecsMat[i]<<endl<<endl;
}
std::cout<<"完成保存"<<endl;
fout<<endl;
system("pause");
return ;
}运行前需要先准备标定图片和记录标定图片列表的文本文件,并放入程序所在目录下,如下图所示:
文本文件的内容如下:
运行效果图1:

图2:
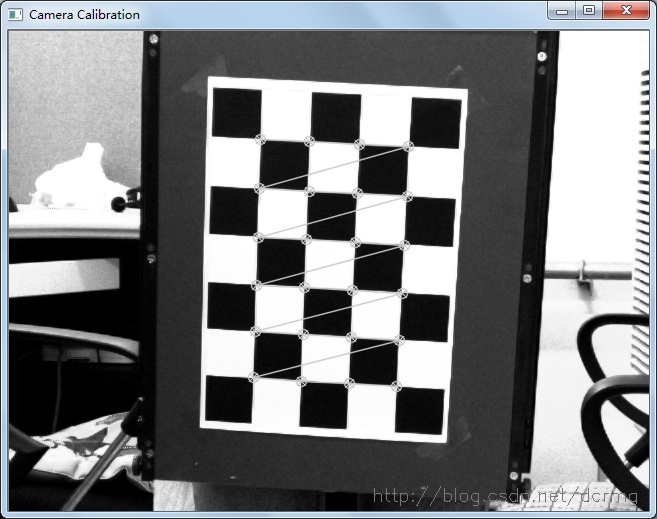
图3:
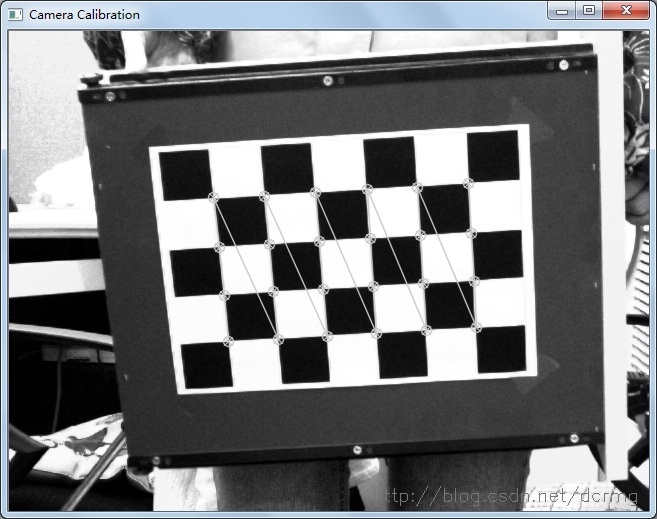
图4:
最后在程序所在目录下生成“caliberation_result.txt”文件,记录了标定的误差、相机内外参数信息:
感谢无名前辈提供的测试图例!
Opencv 张正友相机标定傻瓜教程的更多相关文章
- OpenCV实现张正友相机标定源代码
本源代码基于VC++和opencv Opencv2.4.13.6版本开发,实现张正友相机标定源代码,资源包括完整源代码和12张棋盘图片,完美运行.Opencv2.4.13.6安装包下载地址:http: ...
- 张正友相机标定Opencv实现以及标定流程&&标定结果评价&&图像矫正流程解析(附标定程序和棋盘图)
使用Opencv实现张正友法相机标定之前,有几个问题事先要确认一下,那就是相机为什么需要标定,标定需要的输入和输出分别是哪些? 相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的 ...
- SLAM入门之视觉里程计(6):相机标定 张正友经典标定法详解
想要从二维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM中,相机通常是提前标定好的.张正友于1998年在论文:"A Flexible New Technique fro Cam ...
- 树莓派Opencv张正友棋盘标定法
make.Makefile cc = gcc #最简易的makefile文件,这个可以用来进行文件之间的简易构建和链接,生成我们所需要的执行文件: prom = calc deps = $(shell ...
- opencv 角点检测+相机标定+去畸变+重投影误差计算
https://blog.csdn.net/u010128736/article/details/52875137 https://blog.csdn.net/h532600610/article/d ...
- OpenCV相机标定和姿态更新
原帖地址: http://blog.csdn.net/aptx704610875/article/details/48914043 http://blog.csdn.net/aptx704610875 ...
- 【视频开发】【计算机视觉】相机标定(Camera calibration)原理、步骤
相机标定(Camera calibration)原理.步骤 author@jason_ql(lql0716) http://blog.csdn.net/lql0716 在图像测量过程以及机器视觉应用 ...
- 相机标定:PNP基于单应面解决多点透视问题
利用二维视野内的图像,求出三维图像在场景中的位姿,这是一个三维透视投影的反向求解问题.常用方法是PNP方法,需要已知三维点集的原始模型. 本文做了大量修改,如有不适,请移步原文: ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
随机推荐
- UVA 10635 - Prince and Princess LCS转化为LIS
http://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&page=show_problem&p ...
- AE开发技术文档--8种数据访问方法
转自原文 AE开发技术文档--8种数据访问方法 1.shapefile IWorkspaceFactory pWorkspaceFactory; pWorkspaceFactory = new Sha ...
- 12.2 linux USB框架分析(详细注册match匹配过程)
首先我们先来简单说一说USB的框架,之后在来具体分析源码,以便加深理解!其实USB的框架比较像“平台总线.设备.驱动”的框架,也分为总线.设备.驱动三大块.其中总线驱动是已经由内核完成的,一旦接入u ...
- [LeetCode][Java] Letter Combinations of a Phone Number
题目: Given a digit string, return all possible letter combinations that the number could represent. A ...
- chain rule 到 Markov chain
1. 联合概率(joint distribution)的链式法则 基于链式法则的 explicit formula: p(x1:n)===p(x)p(x1)∏i=2np(xi|x1,-,xi−1)∏i ...
- Python IDLE如何清屏
金gordon 原文 IDLE如何清屏 在学习和使用python的过程中,少不了要与Python IDLE打交道.但使用 Python IDLE 都会遇到一个常见而又懊恼的问题——要怎么清屏? 答案是 ...
- swift学习第五天:字符串
字符串的介绍 字符串在任何的开发中使用都是非常频繁的 OC和Swift中字符串的区别 在OC中字符串类型时NSString,在Swift中字符串类型是String OC中字符串@"" ...
- Json入门 分类: C_OHTERS 2014-04-23 16:20 601人阅读 评论(0) 收藏
参考<疯狂android讲义>>730页 JSON的基础请参考W3SCHOOL的教程: http://www.w3school.com.cn/json/index.asp 例子: h ...
- [转载]Ocelot简易教程(三)之主要特性及路由详解
上篇<Ocelot简易教程(二)之快速开始2>教大家如何快速跑起来一个ocelot实例项目,也只是简单的对Ocelot进行了配置,这篇文章会给大家详细的介绍一下Ocelot的配置信息.希望 ...
- [Angular Directive] 2. Add Inputs to Angular 2 Directives
The @Input decorator allows you to pass values into your @Directive so that you can change the value ...