X210串口配置与stdio移植
串口控制器初始化关键步骤
(1)初始化串口的Tx和Rx引脚所对应的GPIO(查原理图可知Rx和Rx分别对应GPA0_1和GPA0_0)
(2)GPA0CON(0xE0200000),bit[3:0] = 0b0010 bit[7:4] = 0b0010
(3)初始化这几个关键寄存器UCON0 ULCON0 UMCON0 UFCON0 UBRDIV0 UDIVSLOT0
主要的几个寄存器
(1)ULCON0 = 0x3 // 0校验位、8数据位、1停止位
(2)UCON = 0x5 // 发送和接收都是polling mode
(3)UMCON0 = 0x0 // 禁止modem、afc
(4)UFCON0 = 0x0 // 禁止FIFO模式
(5)UBRDIV0和UDIVSLOT0和波特率有关,要根据公式去算的
波特率的计算和设置
(1)第一步,用PCLK_PSYS和目标波特率去计算DIV_VAL: DIV_VAL = (PCLK / (bps x 16)) ?1
(2)第二步,UBRDIV0寄存器中写入DIV_VAL的整数部分
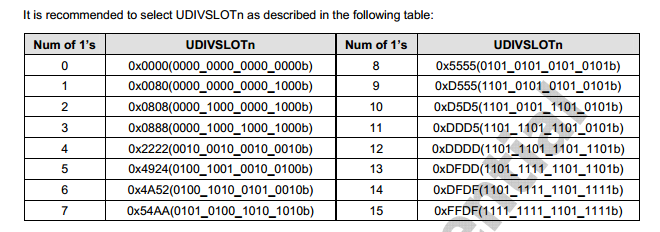
(3)第三步,用小数部分*16得到1个个数,查表得uBDIVSLOT0寄存器的设置值

#define GPA0CON 0xE0200000
#define UCON0 0xE2900004
#define ULCON0 0xE2900000
#define UMCON0 0xE290000C
#define UFCON0 0xE2900008
#define UBRDIV0 0xE2900028
#define UDIVSLOT0 0xE290002C #define UTRSTAT0 0xE2900010
#define UTXH0 0xE2900020
#define URXH0 0xE2900024 #define rGPA0CON (*(volatile unsigned int *)GPA0CON)
#define rUCON0 (*(volatile unsigned int *)UCON0)
#define rULCON0 (*(volatile unsigned int *)ULCON0)
#define rUMCON0 (*(volatile unsigned int *)UMCON0)
#define rUFCON0 (*(volatile unsigned int *)UFCON0)
#define rUBRDIV0 (*(volatile unsigned int *)UBRDIV0)
#define rUDIVSLOT0 (*(volatile unsigned int *)UDIVSLOT0)
#define rUTRSTAT0 (*(volatile unsigned int *)UTRSTAT0)
#define rUTXH0 (*(volatile unsigned int *)UTXH0)
#define rURXH0 (*(volatile unsigned int *)URXH0)
//串口初始化
void uart_init()
{ //初始化rx tx对应GPIO引脚
rGPA0CON&=~(0xff<<);//将 bit0~7清零
rGPA0CON|=0x22; //设置 _0 _1引脚为RX TX
//串口相关寄存器
rULCON0=0x3;
rUCON0=0x5;
rUMCON0=;
rUFCON0=;
//波特率计算相关 /* //9600
rUBRDIV0=433;
rUDIVSLOT0=0x2222;
*/
//用66.7MHZ算
//115200
//66700000/(115200*16)-1
rUBRDIV0=;
// rUBRDIV0余数*16 然后查表
rUDIVSLOT0=0x0888;
}
//串口发送一字节
void uart_putc(char c)
{
while(!(rUTRSTAT0&(<<)));//等待发送结束
rUTXH0=c;
}
char uart_getc()
{
while(!(rUTRSTAT0&(<<)));//等待发送结束
return rURXH0;
}
2.移植stdio(部分代码展示)
int printf(const char *fmt, ...)
{
int i;
int len;
va_list args; va_start(args, fmt);
len = vsprintf(g_pcOutBuf,fmt,args);
va_end(args);
for (i = ; i < strlen(g_pcOutBuf); i++)
{
putc(g_pcOutBuf[i]);
}
return len;
} int scanf(const char * fmt, ...)
{
int i = ;
unsigned char c;
va_list args; while()
{
c = getc();
putc(c);
if((c == 0x0d) || (c == 0x0a))
{
g_pcInBuf[i] = '\0';
break;
}
else
{
g_pcInBuf[i++] = c;
}
} va_start(args,fmt);
i = vsscanf(g_pcInBuf,fmt,args);
va_end(args); return i;
}
Makefile
CC = arm-linux-gcc
LD = arm-linux-ld
OBJCOPY = arm-linux-objcopy
OBJDUMP = arm-linux-objdump
AR = arm-linux-ar INCDIR := $(shell pwd)
# C预处理器的flag,flag就是编译器可选的选项
CPPFLAGS := -nostdlib -nostdinc -I$(INCDIR)/include
# C编译器的flag
CFLAGS := -Wall -O2 -fno-builtin #导出这些变量到全局,其实就是给子文件夹下面的Makefile使用
export CC LD OBJCOPY OBJDUMP AR CPPFLAGS CFLAGS objs := start.o led.o clock.o uart.o main.o
objs += lib/libc.a uart.bin: $(objs)
$(LD) -Tlink.lds -o uart.elf $^
$(OBJCOPY) -O binary uart.elf uart.bin
$(OBJDUMP) -D uart.elf > uart_elf.dis
gcc mkv210_image.c -o mkx210
./mkx210 uart.bin .bin lib/libc.a:
cd lib; make; cd .. %.o : %.S
$(CC) $(CPPFLAGS) $(CFLAGS) -o $@ $< -c %.o : %.c
$(CC) $(CPPFLAGS) $(CFLAGS) -o $@ $< -c clean:
rm *.o *.elf *.bin *.dis mkx210 -f
cd lib; make clean; cd ..
X210串口配置与stdio移植的更多相关文章
- 小草手把手教你 LabVIEW 串口仪器控制——VISA 串口配置
建议大家按我发帖子的顺序来看,方便大家理解.请不要跳跃式的阅读.很多人现在看书,都跳跃式的看,选择性的看,导致有些细节的部分没有掌握到,然后又因为某个细节耽误很多时间.以上只是个人建议,高手可以略过本 ...
- Linux下串口配置初步探寻
一.在struct termios结构体中,对串口进行基本配置(如波特率设置,校验位和停止位设置 等). (一): struct termios //串口的设置主要是设置struct termio ...
- 【STM32】STM32串口配置的一般步骤(库函数)
STM32串口配置的一般步骤(库函数)(1)串口时钟使能:RCC_APBxPeriphClockCmd(); GPIO时钟使能:RCC_AHBxPeriphClockCmd();(2)引脚复用映 ...
- S5PV210_uart stdio移植
1.stdio : standard input output 标准输入输出 2.printf函数调用到的2个关键函数: vsprintf : 格式化打印信息,最终得到纯字符串的打印信息等待输出 pu ...
- STM32CubeMX的串口配置,以及驱动代码
1.STM32CubeMX的配置没啥子好说的,使能然后改一下波特率和字长,然后在将中断勾选,把中断等级调到1(一定要比systick的优先级垃圾!!!) 2.驱动代码 在生成的it.c文件中,例如用的 ...
- S5PV210 串口配置与实验(轮询方式)
S5PV210 UART 相关说明 通用异步收发器简称 UART, 即 UNIVERSAL ASYNCHRONOUS RECEIVER AND TRANSMITTER,它用来传输串行数据.发送数据时, ...
- ZLG zigbee 虚拟串口配置
一.设置网关工作模式: 在ZNetCom Utility工具中,将设置网关工作模式为 Real COM 模式 启动 ZNetCom Utility 搜索设备 获得设备信息 修改工作模式为:real c ...
- SVN配置使用及移植
使用svn作为配置管理工具及其普遍的用于项目开发中,网上有很多关于svn的原理介绍及命令行管理教程.这里仅仅分享下个人配置及使用的过程,不通过命令行,可简单的上手操作.如有遗漏欢迎留言交流. 配置及使 ...
- STM32串口配置步骤
串口设置的一般步骤可以总结为如下几个步骤: 1) 串口时钟使能, GPIO 时钟使能2) 串口复位3) GPIO 端口模式设置4) 串口参数初始化5) 开启中断并且初始化 NVIC(如果需要开启中断才 ...
随机推荐
- codeforces 359E Neatness(DFS+构造)
Simon loves neatness. So before he goes to bed, Simon wants to complete all chores in the house. Sim ...
- 阿里云搭建bind服务,外网ip不能用来解析问题解决
options { listen-on port 53 { any; }; //端口开放any listen-on-v6 port 53 { ::1; }; directory "/var/ ...
- Thunder团队第二周 - Scrum会议1
Scrum会议1 小组名称:Thunder 项目名称:爱阅app Scrum Master:王航 工作照片: 参会成员: 王航(Master):http://www.cnblogs.com/wangh ...
- Thunder团队第一周 - Scrum会议7
Scrum会议7 小组名称:Thunder 项目名称:爱阅app Scrum Master:宋雨 工作照片: 参会成员: 王航:http://www.cnblogs.com/wangh013/ 李传康 ...
- JS设置cookie,删除cookie(引)
JS设置cookie,删除cookie(引) js设置cookie有很多种方法. 第一种:(这个是w3c官网的代码) <script> //设置cookie function setCoo ...
- JavaScript初探系列之面向对象
面向对象的语言有一个标志,即拥有类的概念,抽象实例对象的公共属性与方法,基于类可以创建任意多个实例对象,一般具有封装.继承.多态的特性!但JS中对象与纯面向对象语言中的对象是不同的,ECMA标准定义J ...
- P4语法(1)基础数据类型和Header
文章学习自:P4语言编程详解 由于原文有一点的年份,所以也继续阅读了相关的最新规范. P4语言规范 基础数据类型 布尔型(bool) 运算符 描述 and 双目运算符,结果为布尔型 or 双目运算符, ...
- Spring中Controller和RequestMapping的详解
先看一个简单的实例: @Controller @RequestMapping("/hello") public class anyTypeController{ @RequestM ...
- opencv图像像素值读取
说到图像像素,肯定要先认识一下图像中的坐标系长什么样. 1. 坐标体系中的零点坐标为图片的左上角,X轴为图像矩形的上面那条水平线:Y轴为图像矩形左边的那条垂直线.该坐标体系在诸如结构体Mat,Rect ...
- linux 环境变量配置(node)
控制台 env 查看当前的环境变量配置 修改/etc/profile文件,在末尾添加以下内容 export NODE_HOME=/usr/local/node //Node所在路径 export PA ...