Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路:
思路一:把这些”期望“加入到优化问题中。
思路二:调整时间分配,来避免这些问题。
1.corridor
1.1 corridor是什么?
为了限制轨迹的形状,引入了corridor的概念,corridor可以理解为可行通道,如下图,规划出的轨迹必须在corridor内。直观的思路是:如果能把corridor当作约束加入到QP问题中,那么解得的轨迹自然就在corridor内了。 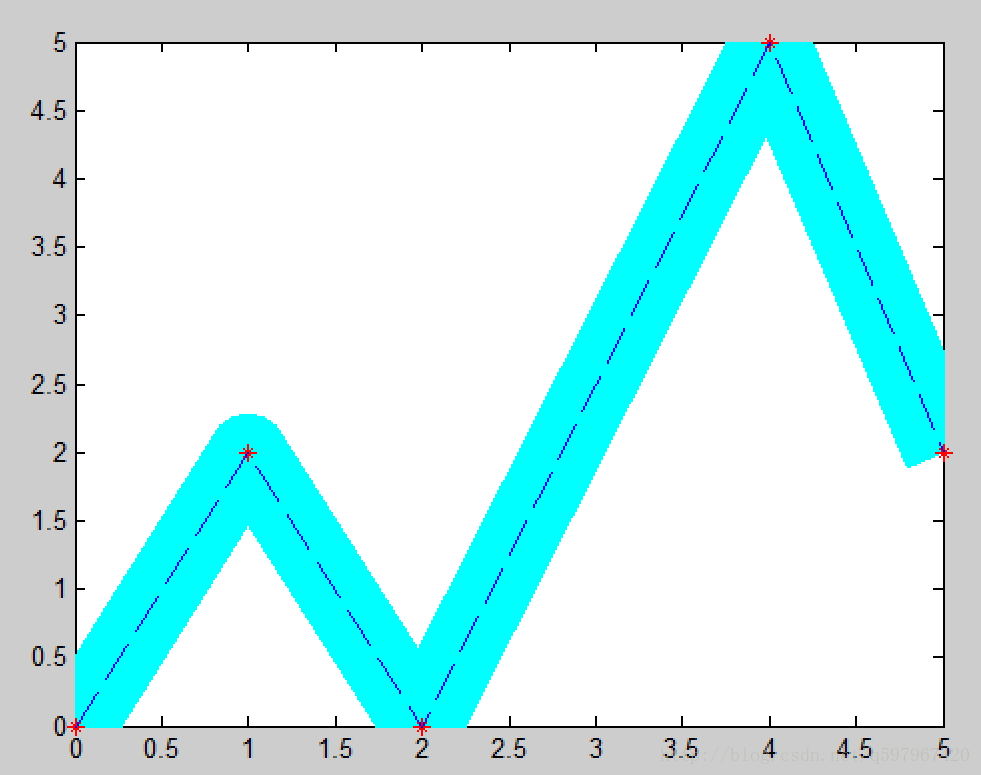
1.2 corridor约束怎么加?
很容易想到,把之前的等式约束 改成不等式约束
改成不等式约束 和
和 。然而,不管是等式约束还是不等式约束,都是针对一个特定的时刻,而实际希望的是对所有时刻
。然而,不管是等式约束还是不等式约束,都是针对一个特定的时刻,而实际希望的是对所有时刻
,都需要在corridor中。
一个简单粗暴的思路:在路径上多采样一些中间点,每个中间点都加corridor约束。尽管这种方法理论上只能保证采样点在corridor中,但实际过程中,如果corridor大小和采样步长设置得合理,而且不Fix
waypoints,能work的比较好。这里不fix
中间点的位置,是为了去掉中间点的强约束,尽量避免轨迹打结,实际中,我们也是不一样要求轨迹完全经过中间点,只要在那附近(corridor)内就行。
1.3 构造corridor不等式约束
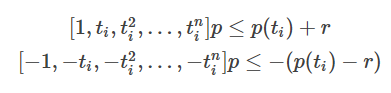
为了方便构造,对于每一个采样点pt,我们施加一个矩形的corridor,即

这里用矩形corridor是因为斜线corridor(平行四边形)不好构造,而且我们只需要大致在corridor里面就好,没有必要非弄一个严格的斜线corridor。对于每个采样点,设矩形corridor的边长为2r,增加两个位置不等式约束:
1.4 实验结果
代码见这里
优化列表in
- min:snap
- 等式约束:起点pva(3)+终点pva(3)+中间点pva连续(3*(nploy-1))
- 不等式约束:中间点位置corridor(2*(nploy-1))
优化结果如下图所示,绿色的点为按固定步长新采样的中间点,每个中间点都有一个矩形corridor,红色为优化后的轨迹。可以看到,去掉中间点的位置强约束(等式约束)改成弱约束(corridor不等式约束)后,轨迹比之前要好很多,而且尽管轨迹有小部分超出了corridor(因为只加了采样时刻的位置corridor约束),但基本不会超出太多。
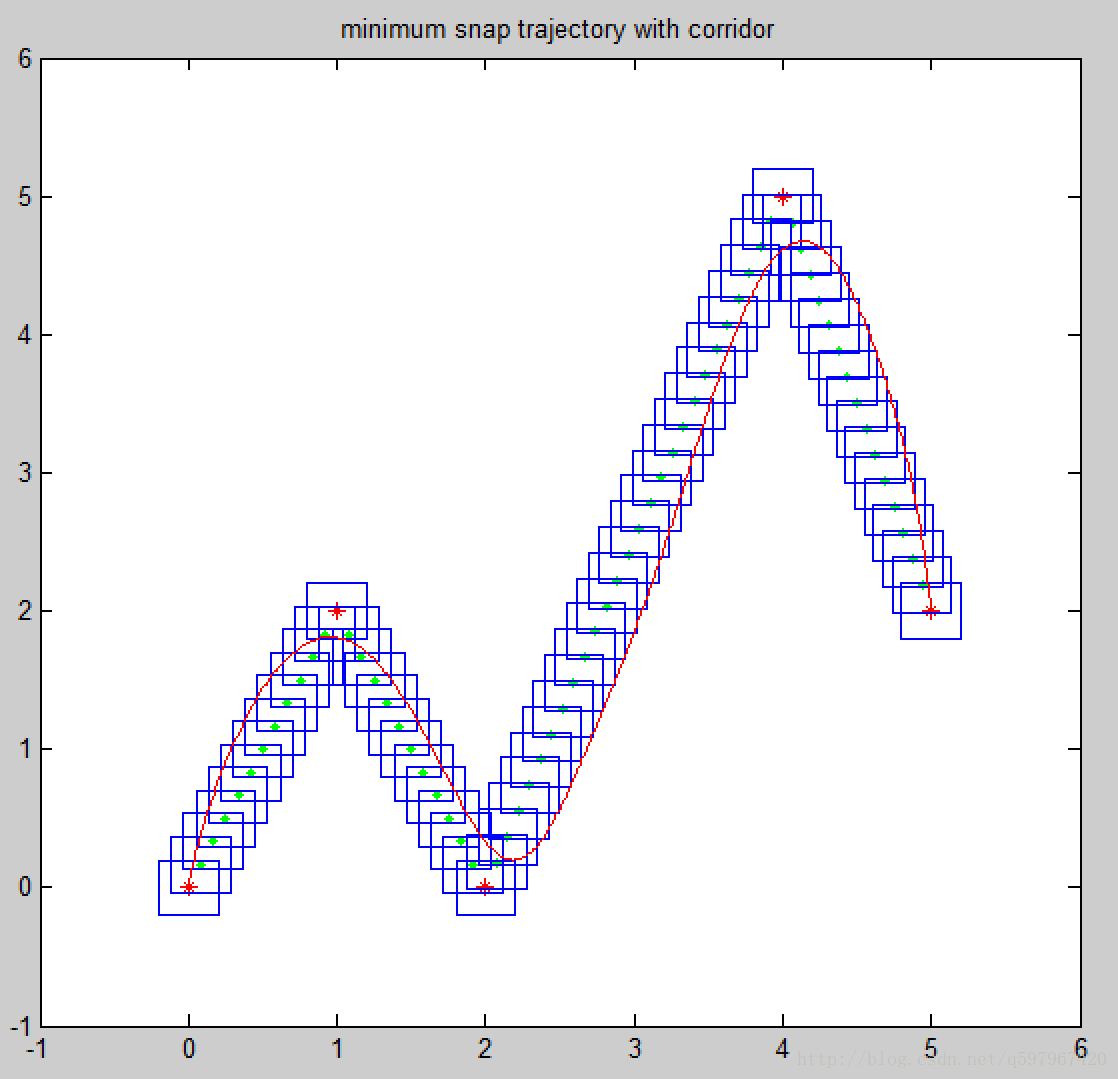
但这带来的一个问题是,为了保证轨迹不超出corridor,需要采样比较密,但这样轨迹的段数就上来的(轨迹段数=waypoint数量-1),优化参数变多了,计算效率会下降。
- 一种解决思路是通过corridor合并来减少中间点\轨迹段数,从而提高计算效率;
- 另一种解决思路是,不采样中间点,直接规划出轨迹以后,找到轨迹的极值点(波峰、波谷),若极值点位置超出corridor,在极值点上添加一个corridor或者位置强约束(俗称”压点“,把极值点压到corridor以内),以此迭代。实验证明:压有限个(不超过路径点总数)点就能把整段轨迹压到corridor以内。
1.5 广义corridor
上面实验介绍了位置corridor,也就是位置不等式约束,但同样也可以扩展到速度corridor、加速度corridor乃至更高阶。
诶~是不是有点灵感?上一篇文章中实验得到的轨迹的另一个问题是速度、加速度超过了最大限幅,所以同样的思路每个waypoint都增加速度、加速度corridor,是不是就能解决了?
然而,并不能!!! 为什么呢?举个简单的例子,假设一维空间规划一条轨迹从0到10,给定总时间T=1s,要求最大限速2m/s,满足要求的轨迹根本不存在,即使你加很多中间点并加速度corridor,得到的轨迹在采样点中间肯定会速度蹭的巨高。
速度、加速度之所以很大,是因为时间给的不合理(时间太小),所以这种情况光靠加corridor是行不通的,还是要从时间分配的层面来解决。
2. 时间分配
时间分配是轨迹规划中很关键的一个问题,它直接影响规划结果的好坏。
2.1 初始时间分配
总时间给定:通常给一个平均速度,根据总路程计算得到总时间
各段时间分配:
匀速分配:假设每段polynomial内速度恒定不变,这样各段poly的时间比就等于路程比。
梯形分配:假设每段polynomial内速度曲线为:以恒定加速度a从0加速到最大速度vmax,再以−a减速到0。a和vmax事先给定,就能得出每一段所需要的时间。
设各段时间分别为t′1,t′2,...,t′n,求前k项和可以得到轨迹分段的时刻向量t0=0,t1=t′1,t2=t1+t′2,...,tn=tn−1+t′n。
2.2 feasibility check
有了时间分配,就可以规划得到轨迹参数,对于轨迹参数,求速度和加速度曲线的极值,判断是否超过最大限幅,如果所有极值都小于最大限幅,则得到可行轨迹。如果不满足,则需要调整该段的时间。
调整的方法是:增大unfeasible段poly的时间,显然,增大时间会使得速度和加速度都变小。通常以一个固定的比例来调整时间如(k=1.2~1.5),并进行迭代,每调整一次,重新规划轨迹并check feasibility,如若不满足,再次加大时间,直至满足为止。
2.3 corridor与时间分配的关联
不等式corridor约束实际上也有时间分配的效果,可以这么想,polynomial的分段点(轨迹中间点)在corridor内移动,实际上就相当于分段点的时刻在移动,中间点在corridor内移动,也就变相调整了前后两段poly分配的时间。
举个简单的例子,如下图所示,
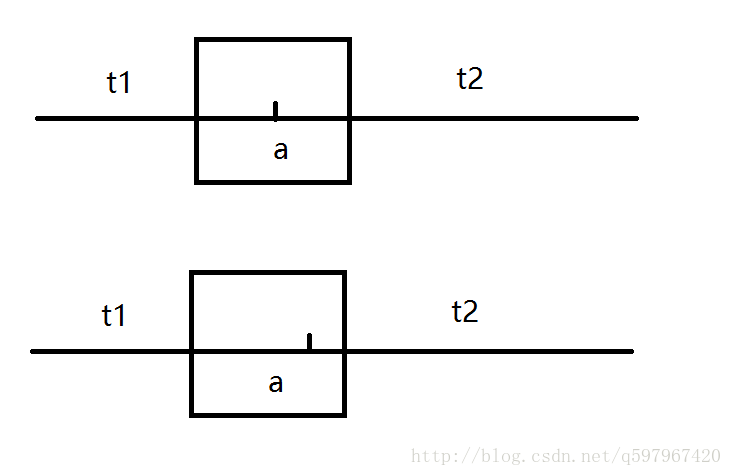
两段轨迹的分段点为a,初始时间分配为t1,t2,比如说想减少前一段的时间t1,加大后一段的时间t2,其实就相当于把分段点a向右挪。也就是说,还是前段poly仍然分配t1时间,但走的路程更多了(相当于原来路程所用的时间减少了),后一段poly在t2时间走的路程更少了(相当于原来的路程所用时间增加了)。所以如果corridor比较大的话,时间调整的空间就会更大,规划出的轨迹就会更平滑。
3. 归一化时间参数
轨迹规划中容易出现一些数值问题,比如需要求t的高阶指数,如果t比较大,计算数值就会很大,而且最终轨迹的参数会很小,特别是高阶项系数,比如很有可能小于float的精度,所以一般计算过程中最好用double。
但还有一种办法,是把轨迹参数做时间归一化,将时间归一化到[0,1]之间。设未归一化的轨迹为 ,令时间
,令时间 ,则
,则
其中, ,T为轨迹总时间,
,T为轨迹总时间, 就是归一化时间的轨迹参数,它们不会像非归一化参数那么小,便于参数传递。
就是归一化时间的轨迹参数,它们不会像非归一化参数那么小,便于参数传递。
归一化参数如何求pva?
对于任一时刻t,先除以总时间T得到归一化时间
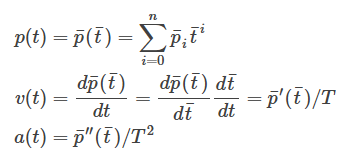
注意:归一化事件参数后,位置计算和原来相同,但速度计算需要除以T,加速度需要除以T2,即每求一阶导需要除以一个T。
实验过程中,用Matlab求解,如果一开始就用归一化时间参数,会解不出来,不知为何?所以,在求解过程中,仍然用的非归一化时间参数,而求解完以后,参数传递出去时,转换成归一化时间参数。
参考链接:https://blog.csdn.net/q597967420/article/details/77623235
Minimum Snap轨迹规划详解(2)corridor与时间分配的更多相关文章
- Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划.运动规划一般又分为两步: 1.路径规划:在地图(栅格地图.四\八叉树.RRT地图等)中搜索一条从A点到B ...
- Minimum Snap轨迹规划详解(3)闭式求解
如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的.闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver. 这里介绍Nicholas Roy文章中闭式 ...
- 传奇定时器OnTimer功能详解(泡点、时间触发、任务活动)
传奇定时器OnTimer功能详解(泡点.时间触发.任务活动) 定时器功能,是传奇服务端中非常常见的一种功能,常见如:泡点脚本.赌博脚本,任务活动指定时间刷怪,时间触发一些都需要用到OnTimer功能, ...
- 企业sudo权限规划详解 (实测一个堆命令搞定)
简述问题: 随着公司的服务器越来越多,人员流动性也开始与日俱增,以往管理服务器的陈旧思想应当摒弃,公司需要有 更好更完善的权限体系,经过多轮沟通和协商,公司一致决定重新整理规划权限体系 ...
- lattice planner 规划详解
大家好,我是来自百度智能驾驶事业群的许珂诚.今天很高兴能给大家分享Apollo 3.0新发布的Lattice规划算法. Lattice算法隶属于规划模块.规划模块以预测模块.routing模块.高精地 ...
- 【Objective-C】NSDate详解及获取当前时间等常用操作
NSDate类用于保存时间值,同时提供了一些方法来处理一些基于秒级别时差(Time Interval)运算和日期之间的早晚比较等. 1. 创建或初始化可用以下方法 用于创建NSDate实例的类方法有 ...
- NSDate详解及获取当前时间等常用操作
NSDate类用于保存时间值,同时提供了一些方法来处理一些基于秒级别时差(Time Interval)运算和日期之间的早晚比较等. 1. 创建或初始化可用以下方法 用于创建NSDate实例的类方法有 ...
- 【转载】Python日期时间模块datetime详解与Python 日期时间的比较,计算实例代码
本文转载自脚本之家,源网址为:https://www.jb51.net/article/147429.htm 一.Python中日期时间模块datetime介绍 (一).datetime模块中包含如下 ...
- Python时间获取详解,Django获取时间详解,模板中获取时间详解(navie时间和aware时间)
1.Python获取到的时间 import pytz from datetime import datetime now = datetime.now() # 这个时间为navie时间(自己不知道自己 ...
随机推荐
- bootsrap 按钮样式
<!-- Standard button --> <button type="button" class="btn btn-default"& ...
- oracle查看数据库版本和字符集
以下以oralce为例, 查看数据库版本? 可以在pl/sql上执行:select * from v$version; 查看字符集? select * from v$nls_parameters; s ...
- DMA实验总结
一.RCC设置 没什么好写的之前USART的基本一样 /************************************************************************ ...
- Service系统服务(四):搭建单区域DNS服务器、特殊DNS解析、配置DNS子域授权、搭建并测试缓存DNS
一.搭建单区域DNS服务器 目标: 本例要求要求为DNS区域tedu.cn搭建一台DNS服务器,以便用户能通过域名的方式访问网站.测试阶段主要提供以下正向记录: svr7.tedu.cn ---> ...
- [NOIP模拟测试37]反思+题解
一定要分析清楚复杂度再打!!!窝再也不要花2h20min用暴力对拍暴力啦!!! 雨露均沾(滑稽),尽量避免孤注一掷.先把暴力分拿全再回来刚正解. 即使剩下的时间不多了也优先考虑认真读题+打暴力而非乱搞 ...
- 【Tomcat】使用Tomcat部署Spring Boot项目生成的jar包
介绍 简单来说,Tomcat是一个免费的,用于Java Web应用以及其它Web应用的一个Web服务器.(简单地概括一下,可能有误) 下载与安装 本文章目标是把Spring Boot Web项目生成的 ...
- python json格式参数遍历所有key、value 及替换key对于的value
1.对于接口自动化测试,一般接口以json形式发送返回,往往我们就需要遍历json文件中所有key,value以及修改替换key对于的value. 例如json发送/接收的文件: SendRegist ...
- bp网络全解读
https://blog.csdn.net/weixin_40432828/article/details/82192709
- winform中的小技巧【自用】
一.C#在WinForm中怎样让多行TEXTBOX的换行 今天做项目,有一段提示文字需要弹出来,由于太长,我就想能不能让它换行.然后就百度了一下,嘿嘿,方法很好用哦. 原文链接:https://blo ...
- Pandas DataFrame操作
DataFrame的创建 >>> import pandas as pd >>> from pandas import DataFrame #define a di ...