Writing a Simple Service and Client (C++)
此前说的publisher/subscriber都是广播式的,subscriber被动地接收消息,二者没有request/response这种交互.
- Service Node
- Client Node
Service Node
#include "ros/ros.h"
#include "beginner_tutorials/AddTwoInts.h" //由.srv文件生成的头文件
//service函数.提供add功能,入参为srv文件里定义好的request/response类型
bool add(beginner_tutorials::AddTwoInts::Request &req,
beginner_tutorials::AddTwoInts::Response &res)
{
res.sum = req.a + req.b;
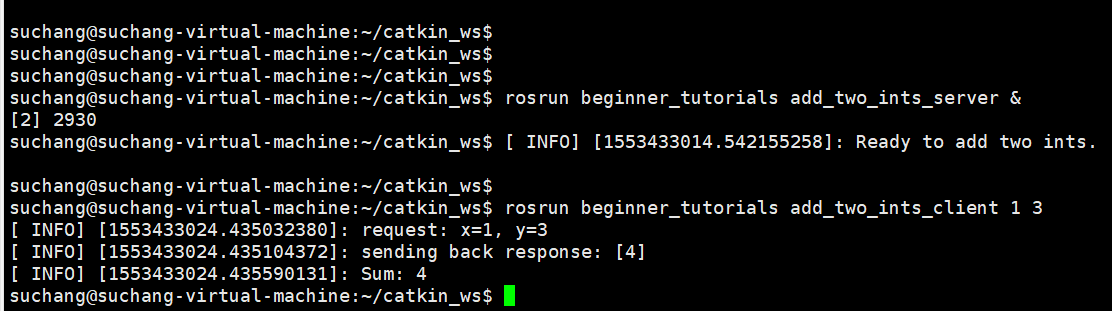
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_two_ints_server");
ros::NodeHandle n;
//创建服务
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
总结一下
- 初始化
- 创建服务
- ros::spin() 简单说就是运行一个loop,避免程序退掉.具体详细解释看https://answers.ros.org/question/257361/what-is-the-actual-meaning-of-rosspin/
Client Node
#include "ros/ros.h"
#include "beginner_tutorials/AddTwoInts.h"
#include <cstdlib>
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_two_ints_client");
if (argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
ros::NodeHandle n;
//创建client
ros::ServiceClient client = n.serviceClient<beginner_tutorials::AddTwoInts>("add_two_ints");
//定义request
beginner_tutorials::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
//发送request
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}
编译
修改CMakeLists.txt
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
target_link_libraries(add_two_ints_server ${catkin_LIBRARIES})
add_dependencies(add_two_ints_server beginner_tutorials_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
target_link_libraries(add_two_ints_client ${catkin_LIBRARIES})
add_dependencies(add_two_ints_client beginner_tutorials_gencpp)
编译
# In your catkin workspace
cd ~/catkin_ws
catkin_make
target_link_libraries与add_dependencies区别.https://www.cnblogs.com/wpcockroach/p/6625699.html
简单说一说前两天学习使用CMake解决链接问题时遇到的一个问题。
对于编译时遇到的依赖问题,很多时候我们只需要一句target_link_libraries就可以搞定。
但是CMake还有另外一个command,add_dependencies。这个什么时候用呢?
一般来说用不到。用到的情况就是两个targets有依赖关系(通过target_link_libraries解决)并且依赖库也是通过编译源码产生的。这时候一句add_dependencies可以在直接编译上层target时,自动检查下层依赖库是否已经生成。没有的话先编译下层依赖库,然后再编译上层target,最后link depend target。
Writing a Simple Service and Client (C++)的更多相关文章
- Creating a Simple Web Service and Client with JAX-WS
Creating a Simple Web Service and Client with JAX-WS 发布服务 package cn.zno.service.impl; import javax. ...
- Learning WCF Chapter1 Generating a Service and Client Proxy
In the previous lab,you created a service and client from scratch without leveraging the tools avail ...
- Writing a simple Lexer in PHP/C++/Java
catalog . Comparison of parser generators . Writing a simple lexer in PHP . phc . JLexPHP: A PHP Lex ...
- 用C#基于WCF创建TCP的Service供Client端调用
本文将详细讲解用C#基于WCF创建TCP的Service供Client端调用的详细过程 1):首先创建一个Windows Service的工程 2):生成的代码工程结构如下所示 3):我们将Servi ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习(十三)—— 编写简单的Service和Client (C++)
一.编写Service节点 1.节点功能: 我们将创建一个简单的service节点("add_two_ints_server"),该节点将接收到两个整形数字,并返回它们的和. 2. ...
- Writing Text Files On The Client in Oracle Forms 10g
Below is the example to write file on client in Oracle Forms 10g with webutil library package.Note: ...
- java的myeclipse生成webservice的service和client
前言:朋友们开始以下教程前,请先看第五大点的注意事项,以避免不必要的重复操作. 一.准备工作(以下为本实例使用工具) 1.MyEclipse10.7.1 2.JDK 1.6.0_22 二.创建服务端 ...
- C++编写简单的Service和Client
在上一步的基础上 编写Service节点 这里,我们将创建一个简单的service节点("add_two_ints_server"),该节点将接收到两个整形数字,并返回它们的和. ...
随机推荐
- Spring AOP就是这么简单啦
前言 只有光头才能变强 上一篇已经讲解了Spring IOC知识点一网打尽!,这篇主要是讲解Spring的AOP模块~ 之前我已经写过一篇关于AOP的文章了,那篇把比较重要的知识点都讲解过了一篇啦:S ...
- log4j java项目中的配置
第一步你需要 相关的jar包 第二歩你需要一个关于log4j的配置文件 第三歩 你需要一个检测用的java 文件 导入这两个jar包进你的项目中 commons-logging.jar log4j-1 ...
- MATLAB R2017b安装及破解(安装详解)
昨天知道有这个Matlab之后就开始想办法安装,今天为各位小伙伴解答昨天安装的过程,希望能够帮助到你们! 使用的镜像软件,我放在压缩包里面 如果你们感觉下载比较麻烦(可以直接发消息给我,我会发给你们的 ...
- Eureka的功能特性及相关配置
1.服务提供者1.1服务注册服务提供者启动时,会通过rest请求的方式将自己注册到Eureka Server上,同时带上了自身服务的一些元数据信息.Eureka Server接收到请求后,将元数据信息 ...
- Mark一下~
今天在cnblogs开通了博客,mark一下~ 上半年的Rebase阶段已经完成,希望下半年的Promotion阶段能收获满满,也希望自己能写出高质量的博客.
- 兄弟俩畅游Tomcat城市的SpringMVC科技园区
Tomcat城市 Tomcat这座城市的历史相当悠久了,经历过几次大的变迁后,呈现出非常明显的地域特征. 从城市往西走,过了城乡结合部以后,可以说是满目疮痍.一片破败,这就是Servlet地区,这座城 ...
- MySQL 复制 - 性能与扩展性的基石 1:概述及其原理
1. 复制概述 MySQL 内置的复制功能是构建基于 MySQL 的大规模.高性能应用的基础,复制解决的基本问题是让一台服务器的数据与其他服务器保持同步. 接下来,我们将从复制概述及原理.复制的配置. ...
- Android Studio Run项目出现Failure [INSTALL_FAILED_TEST_ONLY]
同名掘金博文:https://juejin.im/post/5c2e0c496fb9a049a711f09a 运行环境: AS 版 本:Android Studio 3.2.1 手机型号:vivo Y ...
- ionic3 生命周期
ionic3 总共有8个钩子函数,分别是:onPageLoaded,onPageWillEnter,onPageDidEnter,onPageWillLeave,onPageDidLeave,onPa ...
- 微信小程序 人脸识别登陆模块
微信小程序---人脸识别登陆的实现 关键词:微信小程序 人脸识别 百度云接口 前言 这是一篇关于一个原创微信小程序开发过程的原创文章.涉及到的核心技术是微信小程序开发方法和百度云人脸识别接口.小程序的 ...