4. Orthogonality
4.1 Orthogonal Vectors and Suspaces
Orthogonal vectors have \(v^Tw=0\),and \(||v||^2 + ||w||^2 = ||v+w||^2 = ||v-w||^2\).
Subspaces \(V\) and \(W\) are orthogonal when \(v^Tw = 0\) for every \(v\) in V and every \(w\) in W.
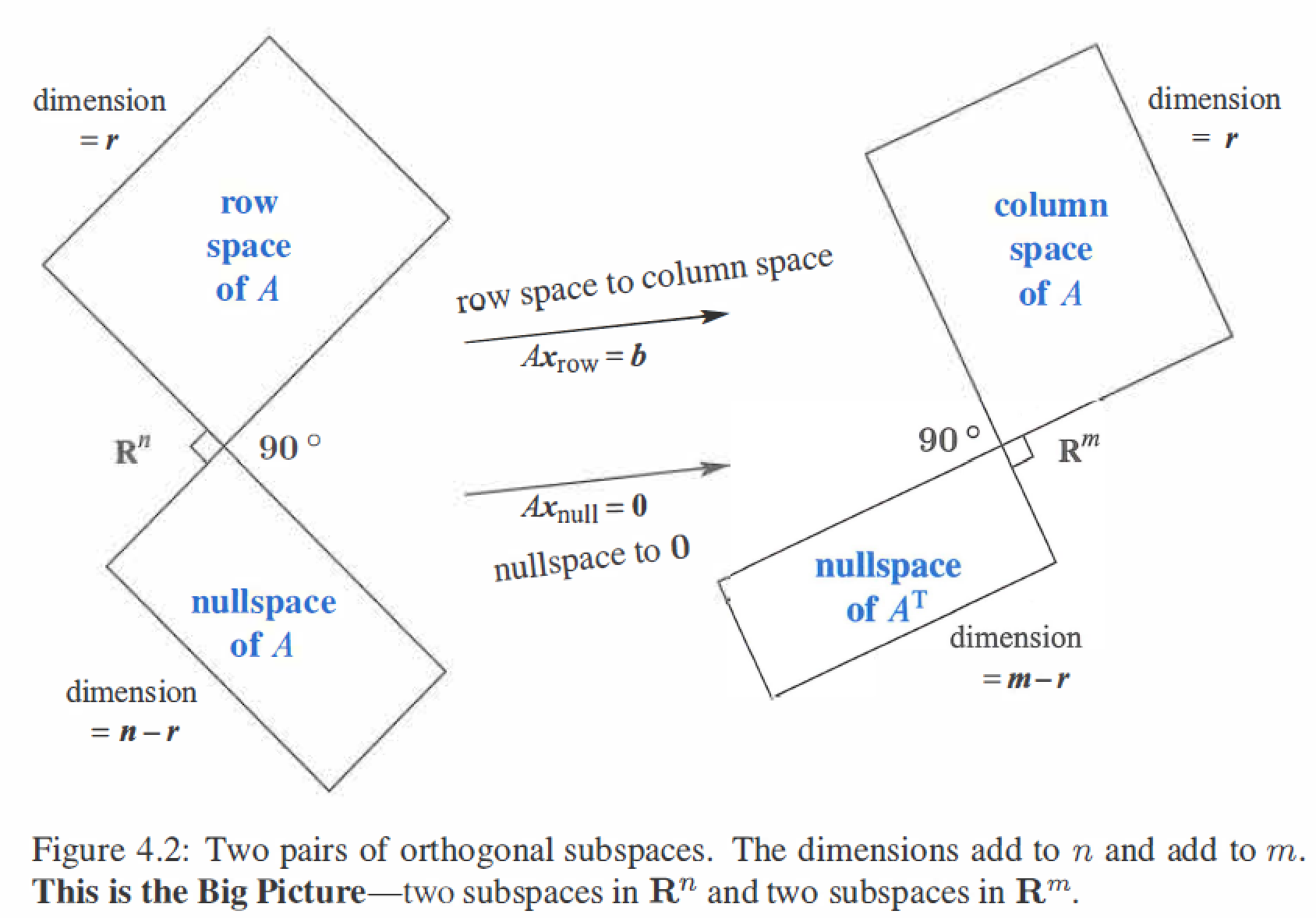
Four Subspaces Relations:
Every vector x in the nullspace is perpendicular to every row of A, because \(Ax=0\).The nullspace N(A) and the row space \(C(A^T)\) are orthogonal subspaces of \(R^n\). \(N(A) \bot C(A^T)\)
\[Ax = \left[ \begin{matrix} &row_1& \\ &\vdots \\ &row_m \end{matrix} \right]
\left[ \begin{matrix} && \\ &x \\ && \end{matrix} \right] = \left[ \begin{matrix} &0& \\ &\vdots \\ &0 \end{matrix} \right]
\]Every vector y in the nullspace of \(A^T\) is perpendicular to every column of A, because \(A^Ty=0\).The left nullspace \(N(A^T)\) and the column space \(C(A)\) are orthogonal subspaces of \(R^m\). \(N(A^T) \bot C(A)\)
\[A^Ty = \left[ \begin{matrix} &(column_1)^T& \\ &\vdots \\ &(column_m)^T \end{matrix} \right]
\left[ \begin{matrix} && \\ &y \\ && \end{matrix} \right] = \left[ \begin{matrix} &0& \\ &\vdots \\ &0 \end{matrix} \right]
\]The nullspace N(A) and the row space \(C(A^T)\) are orthogonal complements, with dimensions (n-r) + r = n. Similarly \(N(A^T)\) and C(A) are orthogonal complements with (m-r) + r = m.
4.2 Projection
When b is not in the columns space C(A),then Ax = b is unsolvable,so find the projection p of b onto C(A),make \(A\hat{x} = p\) is solvable.
Three Steps:
- Find \(\hat{x}\)
- Find p
- Find project matrix P
Projection Onto a Line
A line goes through the origin in the direction of \(a=(a_1, a_2,...,a_m)\).
Along that line, we want the point \(p\) closest to \(b=(b_1,b_2,...,b_m)\).
The key to projection is orthogonality : The line from b to p is perpendicular to the vector a.
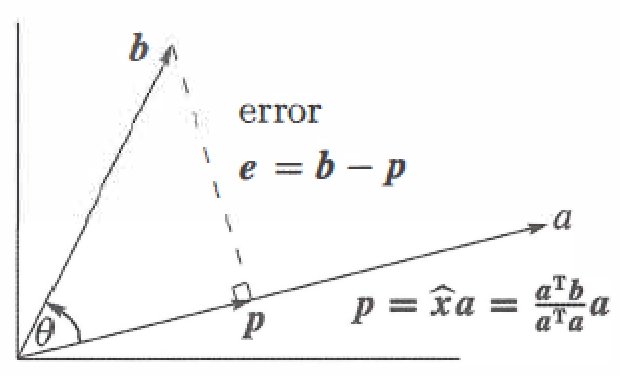
Projecting b onto a with error \(e=b-\hat{x}a\) :
\Downarrow \\
\hat{x} = \frac{a \cdot b}{a \cdot a} = \frac{a^T b}{a^T a} \\
\Downarrow \\
p = a \hat{x} =a\frac{a^T b}{a^T a} = Pb \\
\Downarrow \\
P = \frac{aa^T}{a^Ta} \\
\]
\(P=P^T\) (P is symmetric) , \(P^2=P\)
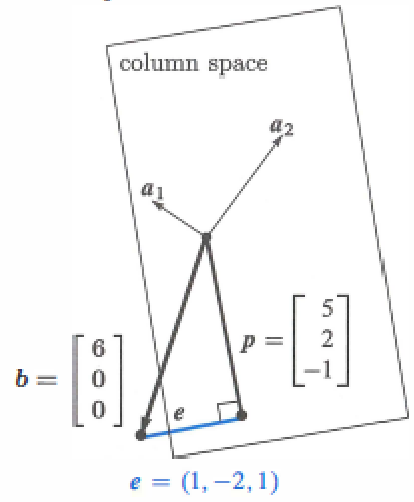
Projection Onto a Subspace
Start with n independent vectors \(A=(a_1,...,a_n)\) in \(R^m\), find the combination \(p=\hat{x}a_1 + \hat{x}a_2 +...+\hat{x_n}a_n\) closest to a givent vector b.
\left[ \begin{matrix} && \\ &b-A\hat{x} \\ && \end{matrix} \right]
= \left[ \begin{matrix} &0& \\ &\vdots \\ &0 \end{matrix} \right] \\
\Downarrow \\
A^T(b-A\hat{x}) = 0 \ \ 或 \ \ \ A^TA\hat{x} = A^Tb \\
\Downarrow A^TA \ \ invertible\\
p=A\hat{x} = A(A^TA)^{-1}A^Tb \\
\Downarrow \\
P=A(A^TA)^{-1}A^T
\]
\(P=P^T\) (P is symmetric) , \(P^2=P\)
4.3 Least Squares Approximations
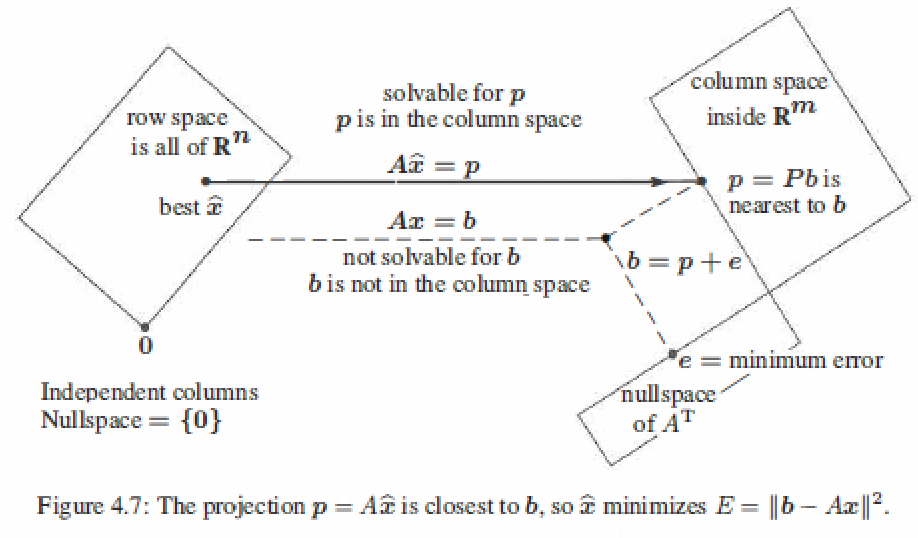
When b is outside the column space of A, that \(Ax=b\) has no solution. Find the length of \(e=b-Ax\) as small as possible, get a \(\hat{x}\) is a least squares solution.
If A has independent columns, then \(A^TA\) is invertible.
proof :
\Downarrow \\
x^TA^TAx = 0 \\
\Downarrow \\
(Ax)^TAx =0 \\
\Downarrow \\
Ax =0 \\
\ A \ \ is \ \ independent \\
\Downarrow \\
x=0
\]
so \(N(A^TA)\) has only zero vector, \(A^TA\) is invertible.
Linear algebra method (projection method)
Sovling \(A^TA\hat{x} = A^Tb\) gives the projection \(p=A\hat{x}\) of b onto the column space of A.
b = p+e \\
\Downarrow \\
A\hat{x} = p \ \ (solvable) \\
\Downarrow \\
\hat{x} = (A^TA)^{-1}A^Tb
\]
example: \(A = \left[ \begin{matrix} 1&1 \\ 1&2 \\ 1&3 \end{matrix} \right], x= \left[ \begin{matrix} C \\ D \end{matrix} \right], b=\left[ \begin{matrix} 1 \\ 2 \\ 2 \end{matrix} \right], Ax=b\) is unsolvable.
\Downarrow \\
A^TA = \left[ \begin{matrix} 1&1&1 \\ 1&2&3 \end{matrix} \right] \left[ \begin{matrix} 1&1 \\ 1&2 \\ 1&3 \end{matrix} \right] = \left[ \begin{matrix} 3&6 \\ 6&14 \end{matrix} \right] \\
A^Tb = \left[ \begin{matrix} 1&1&1 \\ 1&2&3 \end{matrix} \right] \left[ \begin{matrix} 1 \\ 2 \\ 2 \end{matrix} \right] = \left[ \begin{matrix} 5 \\ 11 \end{matrix} \right] \\
\Downarrow \\
\left[ \begin{matrix} 3&6 \\ 6&14 \end{matrix} \right] \left[ \begin{matrix} C \\ D\\ \end{matrix} \right] = \left[ \begin{matrix} 5 \\ 11 \end{matrix} \right] \\
\Downarrow \\
C = 2/3 \ , \ D=1/2 \\
\Downarrow \\
\hat{x} = \left[ \begin{matrix} 2/3 \\ 1/2\end{matrix} \right] \\
\]
Calculus method
The least squares solution \(\hat{x}\) makes the sum of errors \(E = ||Ax - b||^2\) as small as possible.
\]
example: \(A = \left[ \begin{matrix} 1&1 \\ 1&2 \\ 1&3 \end{matrix} \right], x= \left[ \begin{matrix} C \\ D \end{matrix} \right], b=\left[ \begin{matrix} 1 \\ 2 \\ 2 \end{matrix} \right], Ax=b\) is unsolvable.
\Downarrow \\
\part E / \part C = 0 \\
\part E / \part D = 0 \\
\Downarrow \\
C = 2/3 \ , \ D=1/2
\]
The Big Picture for Least Squares
4.4 Orthonormal Bases and Gram-Schmidt
- The columns \(q_1,q_2,...,q_n\) are orthonormal if \(q_i^Tq_j = \left \{ \begin{array}{rcl} 0 \ \ for \ \ i \neq j \\ 1 \ \ for \ \ i=j \end{array}\right\}, Q^TQ=I\).
- If Q is also square, the \(QQ^T=I\) and \(Q^T=Q^{-1}\), Q is an orthogonal matrix.
- The least squares solution to \(Qx = b\) is \(\hat{x} = Q^Tb\). Projection of b : \(p=QQ^Tb = Pb\).
Projection Using Orthonormal Bases: Q Repalces A
Orthogonal matrices are excellent and stable for computations.
Suppose the basis vectors are actually orthonormal, then \(A^TA\) simplifies to \(Q^TQ\), here is \(\hat{x} = Q^Tb\) and \(p=Q\hat{x}=QQ^Tb\).
\
p = \left[ \begin{matrix} |&&| \\ q_1&\cdots&q_n \\ |&&| \end{matrix} \right] \left[ \begin{matrix} q_1^Tb \\ \vdots \\ q_n^Tb \end{matrix} \right] = q_1(q_1^Tb) + ... + q_n(q_n^Tb)
\]
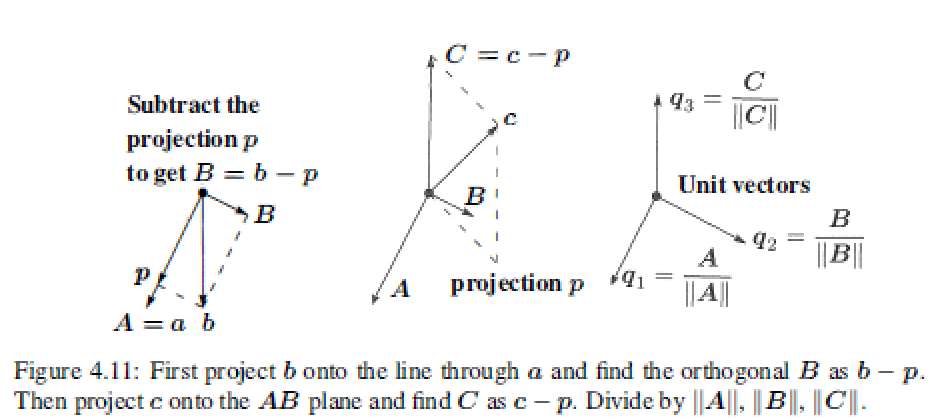
The Gram-Schmidt Process
"Gram-Schmidt way" is to create orthonormal vectors.Take independent column vecotrs \(a_i\) to orthonormal \(q_i\).
From independent vectors \(a_1,...,a_n\),Gram-Schmidt constructs orthonormal vectors \(q_1,...,q_n\).The matrices with these columns satisfy \(A=QR\). The \(R=Q^TA\) is upper triangular because later q's are orthoganal to a's.
Gram-Schmidt Process:
Subtract from every new vector its projections in the directions already set.
- First step : Chosing A=a and \(B = b-\frac{A^Tb}{A^TA}A\) -----> $A \bot B $
- Second step : \(C = c-\frac{A^Tc}{A^TA}A - \frac{B^Tc}{B^TB}B\) -----> $C \bot A \ \ C \bot B $
- Last step (orthonormal): \(q_1 = \frac{A}{||A||},q_2 = \frac{B}{||B||},q_3 = \frac{C}{||C||}\)
The \(q_1,q_2,q_3\) is the orthgonormal base. \(Q=\left[ \begin{matrix} && \\ q_1&q_2&q_3 \\ && \end{matrix} \right]\)
**The Factorization M = QR **:
Any m by n matrix M with independent columns can be factored into \(M=QR\).
\left[ \begin{matrix} q_1^Ta&q_1^Tb&q_1^Tc \\ &q_2^Tb&q_2^Tc \\ &&q_3^Tc \end{matrix} \right]
\]
example:
Suppose the independent not-orthogonal vectors \(a,b,c\) are
b = \left[ \begin{matrix} 2 \\ 0 \\ -2\end{matrix} \right] \ and \ \
c = \left[ \begin{matrix} 3 \\ -3 \\ 3\end{matrix} \right]
\]
Then A=a has \(A^TA=2, A^Tb=2\)
First step : \(B=b-\frac{A^Tb}{A^TA}A = \left[ \begin{matrix} 1 \\ 1 \\ -2\end{matrix} \right]\)
Second step : \(C=c-\frac{A^Tc}{A^TA}A -\frac{B^Tc}{B^TB}B = \left[ \begin{matrix} 1 \\ 1 \\ 1\end{matrix} \right]\)
Last step : \(q_1 = \frac{A}{||A||}= \frac{1}{\sqrt{2}}\left[ \begin{matrix} 1 \\ -1 \\ 0\end{matrix} \right],q_2 = \frac{B}{||B||}=\frac{1}{\sqrt{6}}\left[ \begin{matrix} 1 \\ 1 \\ -2\end{matrix} \right],q_3 = \frac{C}{||C||}=\frac{1}{\sqrt{3}}\left[ \begin{matrix} 1 \\ 1 \\ 1\end{matrix} \right]\)
Factorization :
= \left[ \begin{matrix} 1/\sqrt{2}&1/\sqrt{6}&1/\sqrt{3} \\ -1/\sqrt{2}&1/\sqrt{6}&1/\sqrt{3} \\ 0&-2/\sqrt{6}&1/\sqrt{3} \end{matrix} \right]
\left[ \begin{matrix} \sqrt{2}&\sqrt{2}&\sqrt{18} \\ 0&\sqrt{6}&-\sqrt{6} \\ 0&0&\sqrt{3} \end{matrix} \right] = QR
\]
Least squares
Instead of solving \(Ax=b\), which is impossible, we finally solve \(R\hat{x}=Q^Tb\) by back substitution which is very fast.
A^TA =(QR)^TQR = R^TQ^TQR=R^TR \\
\Downarrow \\
R^TR\hat{x} =R^TQ^Tb \quad or \quad R\hat{x} =Q^Tb \quad or \quad \hat{x} =R^{-1}Q^Tb \\
\]
4. Orthogonality的更多相关文章
- 【线性代数】4-1:四个正交子空间(Orthogonality of the Four Subspace)
title: [线性代数]4-1:四个正交子空间(Orthogonality of the Four Subspace) categories: Mathematic Linear Algebra k ...
- <<Numerical Analysis>>笔记
2ed, by Timothy Sauer DEFINITION 1.3A solution is correct within p decimal places if the error is l ...
- php学习笔记2016.1
基本类型 PHP是一种弱类型语言. PHP类型检查函数 is_bool() is_integer() is_double() is_string() is_objec ...
- FSL - MELODIC
Source: http://fsl.fmrib.ox.ac.uk/fsl/fslwiki/MELODIC; https://fsl.fmrib.ox.ac.uk/fsl/fslwiki/MELODI ...
- Information retrieval信息检索
https://en.wikipedia.org/wiki/Information_retrieval 信息检索 (一种信息技术) 信息检索(Information Retrieval)是指信息按一定 ...
- [转]DCM Tutorial – An Introduction to Orientation Kinematics
原地址http://www.starlino.com/dcm_tutorial.html Introduction This article is a continuation of my IMU G ...
- FAQ: Machine Learning: What and How
What: 就是将统计学算法作为理论,计算机作为工具,解决问题.statistic Algorithm. How: 如何成为菜鸟一枚? http://www.quora.com/How-can-a-b ...
- OpenGL extension specification (from openGL.org)
Shader read/write/atomic into UAV global memory (need manual sync) http://www.opengl.org/registry/sp ...
- A geometric interpretation of the covariance matrix
A geometric interpretation of the covariance matrix Contents [hide] 1 Introduction 2 Eigendecomposit ...
- 知乎上关于c和c++的一场讨论_看看高手们的想法
为什么很多开源软件都用 C,而不是 C++ 写成? 余天升 开源社区一直都不怎么待见C++,自由软件基金会创始人Richard Stallman认为C++有语法歧义,这样子没有必要.非常琐碎还会和C不 ...
随机推荐
- 【开发工具】Linux 服务器 Shell 脚本简单入门
记录一下学习Shell编程的关键知识点,使用最通俗简洁的语句,让阅读者能快速上手Shell脚本的编写 1.什么是Shell? Shell是一种常用于服务器运维的脚本语言.众所周知,脚本语言不需要编译器 ...
- 【Azure Redis 缓存】Azure Redis 功能性讨论三: 调优参数配置
问题描述 在使用Azure Redis的服务中,遇见了以下系列问题需要澄清: 在开源Redis 6.0 中,多线程默认禁用,只使用主线程.如需开启需要修改redis.config配置文件.Redis的 ...
- Netty笔记(3) - 核心组件
各组件关系示意图: Bootstrap 和 ServerBootstrap 说明: Bootstrap 意思是引导,一个 Netty 应用通常由一个 Bootstrap 开始,主要作用是配置整个 Ne ...
- Java 多线程------多线程的创建(2),方式一:继承于Thread类
1 package com.bytezero.threadexer; 2 3 /** 4 * 创建两个分线程,其中一个线程遍历100以内的偶数,另一个线程遍历100以内的奇数 5 * 6 * 7 * ...
- 离线部署-docker
离线部署---docker 关键词:docker离线部署,images离线安装,docker compose,shell,minio docker离线安装 docker install offline ...
- Go语言VSCode开发环境配置
最近学习Golang,先把开发环境配置好. 一.安装Go语言开发包 https://golang.google.cn/dl/ 按步骤安装即可,安装完成后需要设置Windows环境变量 配置好,做个测试 ...
- aardio调用c语言dll动态库传结构体详细教程
开发日记3.11 此篇用于记录发那科数控机床(Fanuc CNC)采集程序开发中,C语言写底层然后用aardio写窗口调用dll的摸索出来的类型对应和踩坑整理. 由于发那科提供的开发套件是C语言的,所 ...
- DuiLib 一个window的皮肤库 C++ 项目,打包小,比较纯正主流的大制作
https://github.com/duilib/duilib 从 火柴 那个软件 发现的这个库
- Nginx的负载均衡策略(4+2)
Nginx的负载均衡策略主要包括以下几种: 轮询(Round Robin):每个请求按时间顺序逐一分配到不同的后端服务器,如果后端服务器down掉,能自动剔除.这是Nginx的默认策略,适合服务器配置 ...
- 一个简单的HTTP服务器的实现
我们继续我们的HTTP服务器的实现(使用别的代码来实现), 这个HTTP服务器的实现,我们主要就是关注TCP服务器中的recv还有send的处理. 首先,看一下HTTP,我们在用浏览器访问我们的TCP ...