Java版人脸跟踪三部曲之三:编码实战
欢迎访问我的GitHub
这里分类和汇总了欣宸的全部原创(含配套源码):https://github.com/zq2599/blog_demos
本篇概览
- 作为《Java版人脸跟踪三部曲》系列的终篇,本文会与大家一起写出完整的人脸跟踪应用代码
- 前文《开发设计》中,已经对人脸跟踪的核心技术、应用主流程、异常处理等方方面面做了详细设计,建议您简单回顾一下
- 接下来,自顶向下,先整体设计好主框架和关键类
程序主框架和关键类
- 听欣宸唠叨了两篇文章,终于要看具体代码了,整体上看,最关键的三个类如下图:
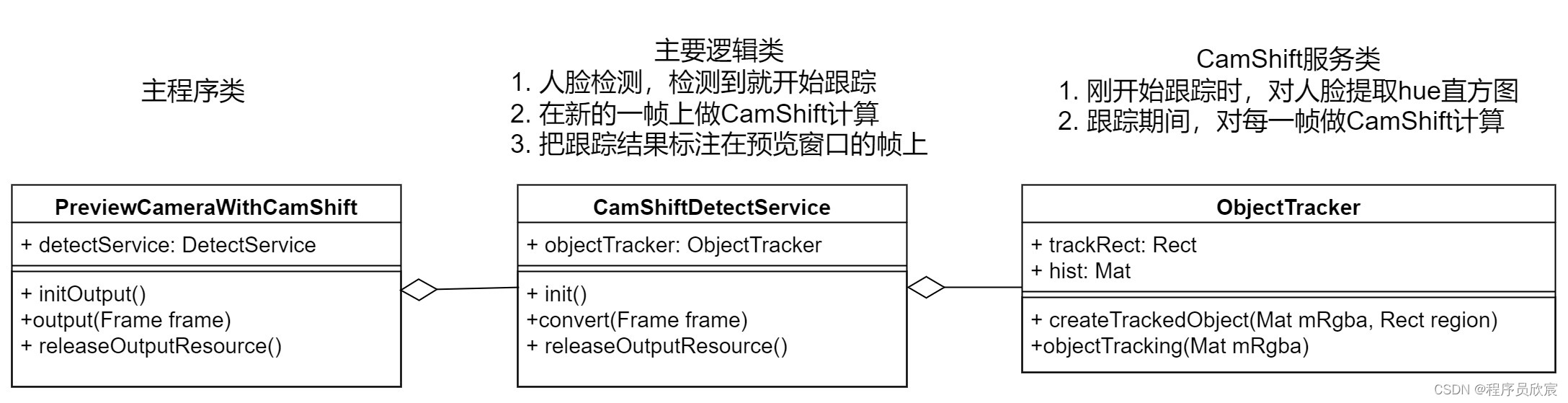
- 可见把功能、流程、知识点梳理清楚后,代码其实并不多,而且各司其职,分工明确,接下来开始编码,ObejctTracker负责实现跟踪功能,就从它开始
ObejctTracker.java:跟踪能力的提供者
- 从前面的图中可知,与跟踪有关的服务都是ObejctTracker类提供的,此类涉及知识点略多,在编写代码前,先做一下简单的设计
- 从功能看,ObejctTracker会对外提供如下两个方法:
| 方法名 | 作用 | 入参 | 返回 | 内部实现 |
|---|---|---|---|---|
| createTrackedObject | 主程序如果从视频帧中首次次检测到人脸,就会调用createTrackedObject方法,表示开始跟踪了 | mRgba:出现人脸的图片 region:人脸在图片中的位置 |
无 | 提取人脸的hue,生成直方图 |
| objectTracking | 开始跟踪后,主程序从摄像头取到的每一帧图片后,都会调用此方法,用于得到人脸在这一帧中的位置 | mRgba:图片 | 人脸在输入图片中位置 | 用人脸hue直方图对输入图片进行计算,得到反向投影图,在反向投影图上做CamShift计算得到人脸位置 |
- 除了上述两个对外方法,ObejctTracker内部还要准备如下两个辅助方法:
| 方法名 | 作用 | 入参 | 返回 | 内部实现 |
|---|---|---|---|---|
| rgba2Hue | 将RGB颜色空间的图片转为HSV,再提取出hue通道,生成直方图 | rgba:人脸图片 | 无 | List<Mat>:直方图 |
| lostTrace | 对比objectTracking方法返回的结果与上次出现的位置,确定人有没有跟丢 | lastRect:上次出现的位置 currentRect:objectTracking方法检测到的当前帧上的位置 |
true表示跟丢了,false表示没有跟丢 | 对比两个矩形的差距是否超过一个门限,正常情况下连续两帧中的人脸差别不会太大,所以一旦差别大了就表示跟丢了,currentRect的位置上不是人脸 |
- 还有几个成员变量也很重要:
// 每一帧图像的反向投影图都用这个成员变量来保存
private Mat prob;
// 保存最近一次确认的头像的位置,每当新的一帧到来时,都从这个位置开始追踪(也就是反向投影图做CamShift计算的起始位置)
private Rect trackRect;
// 直方图,在跟丢之前,每一帧图像都要用到这个直方图来生成反向投影
private Mat hist;
- 设计完成,现在可以给出完整的ObejctTracker.java源码了:
package com.bolingcavalry.grabpush.extend;
import lombok.extern.slf4j.Slf4j;
import org.opencv.core.*;
import org.opencv.imgproc.Imgproc;
import org.opencv.video.Video;
import java.util.Collections;
import java.util.List;
import java.util.Vector;
/**
* @author willzhao
* @version 1.0
* @description TODO
* @date 2022/1/8 21:21
*/
@Slf4j
public class ObjectTracker {
/**
* 上一个矩形和当前矩形的差距达到多少的时候,才算跟丢,您可以自行调整
*/
private static final double LOST_GATE = 0.8d;
// [0.0, 256.0]表示直方图能表示像素值从0.0到256的像素
private static final MatOfFloat RANGES = new MatOfFloat(0f, 256f);
private Mat mask;
// 保存用来追踪的每一帧的反向投影图
private Mat prob;
// 保存最近一次确认的头像的位置,每当新的一帧到来时,都从这个位置开始追踪(也就是反向投影图做CamShift计算的起始位置)
private Rect trackRect;
// 直方图
private Mat hist;
public ObjectTracker(Mat rgba) {
hist = new Mat();
trackRect = new Rect();
mask = new Mat(rgba.size(), CvType.CV_8UC1);
prob = new Mat(rgba.size(), CvType.CV_8UC1);
}
/**
* 将摄像头传来的图片提取出hue通道,放入hueList中
* 将摄像头传来的RGB颜色空间的图片转为HSV颜色空间,
* 然后检查HSV三个通道的值是否在指定范围内,mask中记录了检查结果
* 再将hsv中的hue提取出来
* @param rgba
*/
private List<Mat> rgba2Hue(Mat rgba) {
// 实例化Mat,显然,hsv是三通道,hue是hsv三通道其中的一个,所以hue是一通道
Mat hsv = new Mat(rgba.size(), CvType.CV_8UC3);
Mat hue = new Mat(rgba.size(), CvType.CV_8UC1);
// 1. 先转换
// 转换颜色空间,RGB到HSV
Imgproc.cvtColor(rgba, hsv, Imgproc.COLOR_RGB2HSV);
int vMin = 65, vMax = 256, sMin = 55;
//inRange函数的功能是检查输入数组每个元素大小是否在2个给定数值之间,可以有多通道,mask保存0通道的最小值,也就是h分量
//这里利用了hsv的3个通道,比较h,0~180,s,smin~256,v,min(vmin,vmax),max(vmin,vmax)。如果3个通道都在对应的范围内,
//则mask对应的那个点的值全为1(0xff),否则为0(0x00).
Core.inRange(
hsv,
new Scalar(0, sMin, Math.min(vMin, vMax)),
new Scalar(180, 256, Math.max(vMin, vMax)),
mask
);
// 2. 再提取
// 把hsv的数据放入hsvList中,用于稍后提取出其中的hue
List<Mat> hsvList = new Vector<>();
hsvList.add(hsv);
// 准备好hueList,用于接收通道
// hue初始化为与hsv大小深度一样的矩阵,色调的度量是用角度表示的,红绿蓝之间相差120度,反色相差180度
hue.create(hsv.size(), hsv.depth());
List<Mat> hueList = new Vector<>();
hueList.add(hue);
// 描述如何提取:从目标的0位置提取到目的地的0位置
MatOfInt from_to = new MatOfInt(0, 0);
// 提取操作:将hsv第一个通道(也就是色调)的数复制到hue中,0索引数组
Core.mixChannels(hsvList, hueList, from_to);
return hueList;
}
/**
* 当外部调用方确定了人脸在图片中的位置后,就可以调用createTrackedObject开始跟踪,
* 该方法中会先生成人脸的hue的直方图,用于给后续帧生成反向投影
* @param mRgba
* @param region
*/
public void createTrackedObject(Mat mRgba, Rect region) {
hist.release();
//将摄像头的视频帧转化成hsv,然后再提取出其中的hue通道
List<Mat> hueList = rgba2Hue(mRgba);
// 人脸区域的mask
Mat tempMask = mask.submat(region);
// histSize表示这个直方图分成多少份(即多少个直方柱),就是 bin的个数
MatOfInt histSize = new MatOfInt(25);
// 只要头像区域的数据
List<Mat> images = Collections.singletonList(hueList.get(0).submat(region));
// 计算头像的hue直方图,结果在hist中
Imgproc.calcHist(images, new MatOfInt(0), tempMask, hist, histSize, RANGES);
// 将hist矩阵进行数组范围归一化,都归一化到0~255
Core.normalize(hist, hist, 0, 255, Core.NORM_MINMAX);
// 这个trackRect记录了人脸最后一次出现的位置,后面新的帧到来时,就从trackRect位置开始做CamShift计算
trackRect = region;
}
/**
* 在开始跟踪后,每当摄像头新的一帧到来时,外部就会调用objectTracking,将新的帧传入,
* 此时,会用前面准备好的人脸hue直方图,将新的帧计算出反向投影图,
* 再在反向投影图上执行CamShift计算,找到密度最大处,即人脸在新的帧上的位置,
* 将这个位置作为返回值,返回
* @param mRgba 新的一帧
* @return 人脸在新的一帧上的位置
*/
public Rect objectTracking(Mat mRgba) {
// 新的图片,提取hue
List<Mat> hueList;
try {
// 实测此处可能抛出异常,要注意捕获,避免程序退出
hueList = rgba2Hue(mRgba);
} catch (CvException cvException) {
log.error("cvtColor exception", cvException);
trackRect = null;
return null;
}
// 用头像直方图在新图片的hue通道数据中计算反向投影。
Imgproc.calcBackProject(hueList, new MatOfInt(0), hist, prob, RANGES, 1.0);
// 计算两个数组的按位连接(dst = src1 & src2)计算两个数组或数组和标量的每个元素的逐位连接。
Core.bitwise_and(prob, mask, prob, new Mat());
// 在反向投影上进行CamShift计算,返回值就是密度最大处,即追踪结果
RotatedRect rotatedRect = Video.CamShift(prob, trackRect, new TermCriteria(TermCriteria.EPS, 10, 1));
// 转为Rect对象
Rect camShiftRect = rotatedRect.boundingRect();
// 比较追踪前和追踪后的数据,如果出现太大偏差,就认为追踪失败
if (lostTrace(trackRect, camShiftRect)) {
log.info("lost trace!");
trackRect = null;
return null;
}
// 将本次最终到的目标作为下次追踪的对象
trackRect = camShiftRect;
return camShiftRect;
}
/**
* 变化率的绝对值
* @param last 变化前
* @param current 变化后
* @return
*/
private static double changeRate(int last, int current) {
return Math.abs((double)(current-last)/(double) last);
}
/**
* 本次和上一次宽度或者高度的变化率,一旦超过阈值就认为跟踪失败
* @param lastRect
* @param currentRect
* @return
*/
private static boolean lostTrace(Rect lastRect, Rect currentRect) {
// 0不能做除数,如果发现0就认跟丢了
if (lastRect.width<1 || lastRect.height<1) {
return true;
}
double widthChangeRate = changeRate(lastRect.width, currentRect.width);
if (widthChangeRate>LOST_GATE) {
log.info("1. lost trace, old [{}], new [{}], rate [{}]", lastRect.width, currentRect.width, widthChangeRate);
return true;
}
double heightChangeRate = changeRate(lastRect.height, currentRect.height);
if (heightChangeRate>LOST_GATE) {
log.info("2. lost trace, old [{}], new [{}], rate [{}]", lastRect.height, currentRect.height, heightChangeRate);
return true;
}
return false;
}
}
- 最核心的跟踪服务已经完成,接下来要实现完整业务逻辑,即:CamShiftDetectService.java
CamShiftDetectService.java:业务逻辑的提供者
- 有了核心能力,接下来要做的就是在业务中使用这个能力,前文已设计好完整的业务逻辑,这里先简单回顾一下:
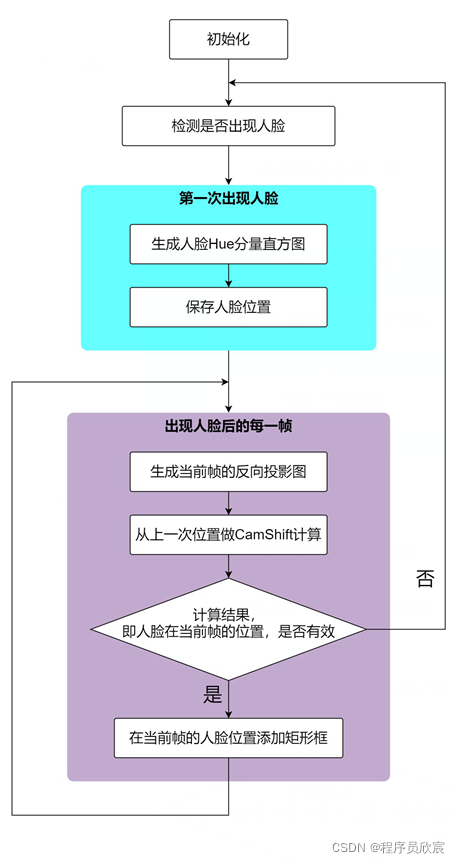
- 可见主要业务流程可以用两个状态+行为来表示:
- 还未开始跟踪:对每一帧做人脸检测,一旦检测到,就进入跟踪状态,并调用ObjectTracker.createTrackedObject生成人脸的hue直方图
- 已处于跟踪状态:对每一帧图像,都调用ObjectTracker.objectTracking去检查人脸在图像中的位置,直到到跟丢了为止,一旦跟丢了,就重新进入到还未开始跟踪的状态
- 现在我们已经清楚了CamShiftDetectService.java要做的具体事情,接下来看看有哪些重要方法:
| 方法名 | 作用 | 入参 | 返回 | 内部实现 |
|---|---|---|---|---|
| init | 被主程序调用的初始化方法,在应用启动的时候会调用一次 | 无 | 无 | 加载人脸检测的模型 |
| convert | 每当主程序从摄像头拿到新的一帧后,都会调用此方法 | frame:来自摄像头的最新一帧 | 被处理后的帧,会被主程序展现在预览窗口 | convert方法内部实现了前面提到的两种状态和行为(还未开始跟踪、已处于跟踪状态) |
| releaseOutputResource | 程序结束前,被主程序调用的释放资源的方法 | 无 | 无 | 释放一些成员变量的资源 |
- 再来看看有哪些重要的成员变量,如下所示,isInTracing表示当前是否处于跟踪状态,classifier用于检测人脸:
/**
* 每一帧原始图片的对象
*/
private Mat grabbedImage = null;
/**
* 分类器
*/
private CascadeClassifier classifier;
/**
* 转换器
*/
private OpenCVFrameConverter.ToMat converter = new OpenCVFrameConverter.ToMat();
/**
* 模型文件的下载地址
*/
private String modelFilePath;
/**
* 存放RGBA图片Mat
*/
private Mat mRgba;
/**
* 存放灰度图片的Mat,仅用在人脸检测的时候
*/
private Mat mGray;
/**
* 跟踪服务类
*/
private ObjectTracker objectTracker;
/**
* 表示当前是否正在跟踪目标
*/
private boolean isInTracing = false;
- 现在可以给出CamShiftDetectService.java的完整代码了:
package com.bolingcavalry.grabpush.extend;
import com.bolingcavalry.grabpush.Util;
import lombok.extern.slf4j.Slf4j;
import org.bytedeco.javacv.Frame;
import org.bytedeco.javacv.OpenCVFrameConverter;
import org.bytedeco.opencv.opencv_core.Mat;
import org.bytedeco.opencv.opencv_core.Rect;
import org.bytedeco.opencv.opencv_core.RectVector;
import org.bytedeco.opencv.opencv_objdetect.CascadeClassifier;
import java.io.File;
import static org.bytedeco.opencv.global.opencv_imgproc.CV_BGR2GRAY;
import static org.bytedeco.opencv.global.opencv_imgproc.cvtColor;
@Slf4j
public class CamShiftDetectService implements DetectService {
/**
* 每一帧原始图片的对象
*/
private Mat grabbedImage = null;
/**
* 分类器
*/
private CascadeClassifier classifier;
/**
* 转换器
*/
private OpenCVFrameConverter.ToMat converter = new OpenCVFrameConverter.ToMat();
/**
* 模型文件的下载地址
*/
private String modelFilePath;
/**
* 存放RGBA图片Mat
*/
private Mat mRgba;
/**
* 存放灰度图片的Mat,仅用在人脸检测的时候
*/
private Mat mGray;
/**
* 跟踪服务类
*/
private ObjectTracker objectTracker;
/**
* 表示当前是否正在跟踪目标
*/
private boolean isInTracing = false;
/**
* 构造方法,在此指定模型文件的下载地址
* @param modelFilePath
*/
public CamShiftDetectService(String modelFilePath) {
this.modelFilePath = modelFilePath;
}
/**
* 音频采样对象的初始化
* @throws Exception
*/
@Override
public void init() throws Exception {
log.info("开始加载模型文件");
// 模型文件下载后的完整地址
String classifierName = new File(modelFilePath).getAbsolutePath();
// 根据模型文件实例化分类器
classifier = new CascadeClassifier(classifierName);
if (classifier == null) {
log.error("Error loading classifier file [{}]", classifierName);
System.exit(1);
}
log.info("模型文件加载完毕,初始化完成");
}
@Override
public Frame convert(Frame frame) {
// 由帧转为Mat
grabbedImage = converter.convert(frame);
// 初始化灰度Mat
if (null==mGray) {
mGray = Util.initGrayImageMat(grabbedImage);
}
// 初始化RGBA的Mat
if (null==mRgba) {
mRgba = Util.initRgbaImageMat(grabbedImage);
}
// 如果未在追踪状态
if (!isInTracing) {
// 存放检测结果的容器
RectVector objects = new RectVector();
// 当前图片转为灰度图片
cvtColor(grabbedImage, mGray, CV_BGR2GRAY);
// 开始检测
classifier.detectMultiScale(mGray, objects);
// 检测结果总数
long total = objects.size();
// 当前实例是只追踪一人,因此一旦检测结果不等于一,就不处理,您可以根据自己业务情况修改此处
if (total!=1) {
objects.close();
return frame;
}
log.info("start new trace");
Rect r = objects.get(0);
int x = r.x(), y = r.y(), w = r.width(), h = r.height();
// 得到opencv的mat,其格式是RGBA
org.opencv.core.Mat openCVRGBAMat = Util.buildJavacvBGR2OpenCVRGBA(grabbedImage, mRgba);
// 在buildJavacvBGR2OpenCVRGBA方法内部,有可能在执行native方法的是否发生异常,要做针对性处理
if (null==openCVRGBAMat) {
objects.close();
return frame;
}
// 如果第一次追踪,要实例化objectTracker
if (null==objectTracker) {
objectTracker = new ObjectTracker(openCVRGBAMat);
}
// 创建跟踪目标
objectTracker.createTrackedObject(openCVRGBAMat, new org.opencv.core.Rect(x, y, w, h));
// 根据本次检测结果给原图标注人脸矩形框
Util.rectOnImage(grabbedImage, x, y, w, h);
// 释放检测结果资源
objects.close();
// 修改标志,表示当前正在跟踪
isInTracing = true;
// 将标注过的图片转为帧,返回
return converter.convert(grabbedImage);
}
// 代码走到这里,表示已经在追踪状态了
// 得到opencv的mat,其格式是RGBA
org.opencv.core.Mat openCVRGBAMat = Util.buildJavacvBGR2OpenCVRGBA(grabbedImage, mRgba);
// 在buildJavacvBGR2OpenCVRGBA方法内部,有可能在执行native方法的是否发生异常,要做针对性处理
if (null==openCVRGBAMat) {
return frame;
}
// 基于上一次的检测结果开始跟踪
org.opencv.core.Rect rotatedRect = objectTracker.objectTracking(openCVRGBAMat);
// 如果rotatedRect为空,表示跟踪失败,此时要修改状态为"未跟踪"
if (null==rotatedRect) {
isInTracing = false;
// 返回原始帧
return frame;
}
// 代码能走到这里,表示跟踪成功,拿到的新的一帧上的目标的位置,此时就在新位置上
// Util.rectOnImage(grabbedImage, rotatedRect.x, rotatedRect.y, rotatedRect.width, rotatedRect.height);
// 矩形框的整体向下放一些(总高度的五分之一),另外跟踪得到的高度过大,画出的矩形框把脖子也框上了,这里改用宽度作为高度
Util.rectOnImage(grabbedImage, rotatedRect.x, rotatedRect.y + rotatedRect.height/5, rotatedRect.width, rotatedRect.width);
return converter.convert(grabbedImage);
}
/**
* 程序结束前,释放人脸识别的资源
*/
@Override
public void releaseOutputResource() {
if (null!=grabbedImage) {
grabbedImage.release();
}
if (null!=mGray) {
mGray.release();
}
if (null!=mRgba) {
mRgba.release();
}
if (null==classifier) {
classifier.close();
}
}
}
- 至此·,功能已经完成得七七八八,再来写完主程序就可以运行了;
PreviewCameraWithCamShift.java:主程序
- 《JavaCV的摄像头实战之一:基础》创建的simple-grab-push工程中已经准备好了父类AbstractCameraApplication,所以本篇继续使用该工程,创建子类PreviewCameraWithCamShift实现那些抽象方法即可
- 编码前先回顾父类的基础结构,如下图,粗体是父类定义的各个方法,红色块都是需要子类来实现抽象方法,所以接下来,咱们以本地窗口预览为目标实现这三个红色方法即可:
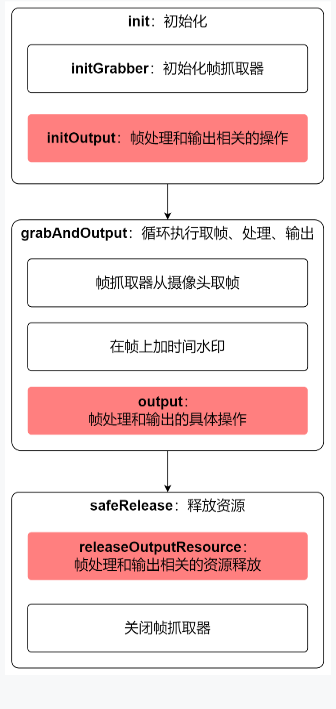
- 新建文件PreviewCameraWithCamShift.java,这是AbstractCameraApplication的子类,其代码很简单,接下来按上图顺序依次说明
- 先定义CanvasFrame类型的成员变量previewCanvas,这是展示视频帧的本地窗口:
protected CanvasFrame previewCanvas
- 把前面创建的DetectService作为成员变量,后面检测的时候会用到:
/**
* 检测工具接口
*/
private DetectService detectService;
- PreviewCameraWithCamShift的构造方法,接受DetectService的实例:
/**
* 不同的检测工具,可以通过构造方法传入
* @param detectService
*/
public PreviewCameraWithCamShift(DetectService detectService) {
this.detectService = detectService;
}
- 然后是初始化操作,可见是previewCanvas的实例化和参数设置,还有检测、识别的初始化操作:
@Override
protected void initOutput() throws Exception {
previewCanvas = new CanvasFrame("摄像头预览", CanvasFrame.getDefaultGamma() / grabber.getGamma());
previewCanvas.setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
previewCanvas.setAlwaysOnTop(true);
// 检测服务的初始化操作
detectService.init();
}
- 接下来是output方法,定义了拿到每一帧视频数据后做什么事情,这里调用了detectService.convert检测人脸并识别性别,然后在本地窗口显示:
@Override
protected void output(Frame frame) {
// 原始帧先交给检测服务处理,这个处理包括物体检测,再将检测结果标注在原始图片上,
// 然后转换为帧返回
Frame detectedFrame = detectService.convert(frame);
// 预览窗口上显示的帧是标注了检测结果的帧
previewCanvas.showImage(detectedFrame);
}
- 最后是处理视频的循环结束后,程序退出前要做的事情,先关闭本地窗口,再释放检测服务的资源:
@Override
protected void releaseOutputResource() {
if (null!= previewCanvas) {
previewCanvas.dispose();
}
// 检测工具也要释放资源
detectService.releaseOutputResource();
}
- 由于检测有些耗时,所以两帧之间的间隔时间要低于普通预览:
@Override
protected int getInterval() {
return super.getInterval()/8;
}
- 至此,功能已开发完成,再写上main方法,代码如下,请注意人脸检测所需的模型文件的路径来自系统变量:
public static void main(String[] args) {
String modelFilePath = System.getProperty("model.file.path");
log.info("模型文件本地路径:{}", modelFilePath);
new PreviewCameraWithCamShift(new CamShiftDetectService(modelFilePath)).action(1000);
}
- 至此,《Java版人脸跟踪三部曲》的代码已经全部写完了,可以像《Java版人脸跟踪三部曲之一:极速体验》文中那样运行起来了
运行程序要注意的地方
- 下载opencv在windows环境的动态链接库:https://download.csdn.net/download/boling_cavalry/75121158,我这里下载后放在:C:\study\javacv\lib\opencv_java453.dll
- 人脸检测的模型文件,在GitHub下载,地址是:https://raw.github.com/opencv/opencv/master/data/haarcascades/haarcascade_frontalface_alt.xml,我这里下载后放在:C:\study\javacv\model\haarcascade_frontalface_alt.xml
- 运行程序的时候,不论是打包成jar,还是直接在IDEA中运行,都要添加下面这两个命令参数,才能确保应用加载到dll和模型文件(请按照您自己的存储位置修改下面参数的值):
- -Djava.library.path=C:\study\javacv\lib
- -Dmodel.file.path=C:\study\javacv\model\haarcascade_frontalface_alt.xml
- 程序运行起来后,具体的效果与像《Java版人脸跟踪三部曲之一:极速体验》中一模一样,这里就不再赘述了,您自行验证就好
- 其实本篇不运行程序,还有一个原因就是要过年了,用来检测人脸的群众演员临时涨价,要两份盒饭,欣宸实在是负担不起...
源码下载
- 《JavaCV人脸识别三部曲》的完整源码可在GitHub下载到,地址和链接信息如下表所示(https://github.com/zq2599/blog_demos):
| 名称 | 链接 | 备注 |
|---|---|---|
| 项目主页 | https://github.com/zq2599/blog_demos | 该项目在GitHub上的主页 |
| git仓库地址(https) | https://github.com/zq2599/blog_demos.git | 该项目源码的仓库地址,https协议 |
| git仓库地址(ssh) | git@github.com:zq2599/blog_demos.git | 该项目源码的仓库地址,ssh协议 |
- 这个git项目中有多个文件夹,本篇的源码在javacv-tutorials文件夹下,如下图红框所示:

- javacv-tutorials里面有多个子工程,《JavaCV的摄像头实战》系列的代码在simple-grab-push工程下:

- 至此,《Java版人脸跟踪三部曲》完美收官,但是《JavaCV的摄像头实战》系列还会继续呈现更多精彩内容,欢迎关注;
欢迎关注博客园:程序员欣宸
Java版人脸跟踪三部曲之三:编码实战的更多相关文章
- Java版人脸检测详解下篇:编码
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- 三分钟极速体验:Java版人脸检测
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- Java版人脸检测详解上篇:运行环境的Docker镜像(CentOS+JDK+OpenCV)
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- kubernetes下的Nginx加Tomcat三部曲之三:实战扩容和升级
本章是<kubernetes下的Nginx加Tomcat三部曲系列>的终篇,今天咱们一起在kubernetes环境对下图中tomcat的数量进行调整,再修改tomcat中web工程的源码, ...
- Java版 人脸识别SDK demo
虹软人脸识别SDK之Java版,支持SDK 1.1+,以及当前最新版本2.0,滴滴,抓紧上车! 前言 由于业务需求,最近跟人脸识别杠上了,本以为虹软提供的SDK是那种面向开发语言的,结果是一堆dll· ...
- Java版 人脸识别SDK dem
虹软人脸识别SDK之Java版,支持SDK 1.1+,以及2.0版本,滴滴,抓紧上车! 前言由于业务需求,最近跟人脸识别杠上了,本以为虹软提供的SDK是那种面向开发语言的,结果是一堆dll······ ...
- Java版流媒体编解码和图像处理(JavaCPP+FFmpeg)
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- java版gRPC实战之三:服务端流
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- 第六篇 :微信公众平台开发实战Java版之如何自定义微信公众号菜单
我们来了解一下 自定义菜单创建接口: http请求方式:POST(请使用https协议) https://api.weixin.qq.com/cgi-bin/menu/create?access_to ...
- 第九篇 :微信公众平台开发实战Java版之如何实现自定义分享内容
第一部分:微信JS-SDK介绍 微信JS-SDK是微信公众平台面向网页开发者提供的基于微信内的网页开发工具包. 通过使用微信JS-SDK,网页开发者可借助微信高效地使用拍照.选图.语音.位置等手机系统 ...
随机推荐
- MQTT(EMQX) - SpringBoot 整合MQTT 连接池 Demo - 附源代码 + 在线客服聊天架构图
MQTT(EMQX) - Linux CentOS Docker 安装 MQTT 概述 MQTT (Message Queue Telemetry Transport) 是一个轻量级传输协议,它被设计 ...
- Java 开源项目整合
在JAVA学习过程中,学习到的简单项目,在这里记录下. SSM框架的整合 使用到的框架:SpringMVC + Spring + MyBatis 地址:https://github.com/liyif ...
- DevOps infra | 互联网、软件公司基础设施建设(基建)哪家强?
国内公司普遍不注重基础设施建设,这也是可以理解的.吃饭都吃不饱,就别提什么荤素搭配,两菜一汤了.但也不能全说是这样,还是有很多公司投入大量的人力物力去做好公司的基建,比如很多阿里和美团的小伙伴对公司的 ...
- CentOS配置Django虚拟环境--坑点总结
1.CentOS原装有python2.7,编译安装python3.X版本 2.sqlite-devel未安装 3.sqlite3版本过低报错 升级sqlite3版本 参考 https://blog.c ...
- Cesium加载ArcGIS Server4490且orgin -400 400的切片服务
Cesium在使用加载Cesium.ArcGisMapServerImageryProvider加载切片服务时,默认只支持wgs84的4326坐标系,不支持CGCS2000的4490坐标系. 如果是A ...
- 超声波、毫米波、ToF激光雷达——在低功耗场景的应用选型
前言: 目前主要的测距方式有:光学测距,超声波和微波雷达测距. 光学测距又可以分为:双目,结构光,ToF.微波雷达,在消费类产品中,常见的是波长在毫米级别的毫米波雷达.超声波应用比较多的是在车载倒车雷 ...
- HTML中meta标签的那些属性
<meta> 标签是 HTML 中用于描述网页元信息的元素.它位于 <head> 部分,不会显示在页面内容中,但对于浏览器.搜索引擎等具有重要作用.主要作用有:定义文档的字符编 ...
- 基于ORB-SLAM3库搭建SLAM系统
参考资料 ORB-SLAM3配置及安装教程 ORB-SLAM3配置安装及运行 环境配置 Win 11pro VMware 17Pro Ubuntu 18.04 Eigen3 Pangolin Open ...
- 2021-07-28:最短的桥。在给定的二维二进制数组 A 中,存在两座岛。(岛是由四面相连的 1 形成的一个最大组。)现在,我们可以将 0 变为 1,以使两座岛连接起来,变成一座岛。返回必须翻转的
2021-07-28:最短的桥.在给定的二维二进制数组 A 中,存在两座岛.(岛是由四面相连的 1 形成的一个最大组.)现在,我们可以将 0 变为 1,以使两座岛连接起来,变成一座岛.返回必须翻转的 ...
- 2021-10-18:乘积最大子数组。给你一个整数数组 nums ,请你找出数组中乘积最大的连续子数组(该子数组中至少包含一个数字),并返回该子数组所对应的乘积。力扣152。
2021-10-18:乘积最大子数组.给你一个整数数组 nums ,请你找出数组中乘积最大的连续子数组(该子数组中至少包含一个数字),并返回该子数组所对应的乘积.力扣152. 福大大 答案2021-1 ...