move_base
1》准备导航所需要的包。
a.ros-indigo-gampping :我们不需要修改包内的东西,所以直接安装可执行文件就好了。
sudo apt-get install ros-indigo-slam-gmapping
b.安装雷达的驱动(我的是robopack),直接将提供的ros驱动包拷贝到工作空间中,
c.安装导航定位包,navigation 进入git:https://github.com/ros-planning/navigation/tree/indigo-devel,下载和自己ros版本匹配的包,解压到自己的工作空间中,
cd ~/catkin_ws
catkin_make
indigo的navigation包会出现一个依赖问题,:Orocos-bfl not found while installing navigation stack ROS indigo + Ubuntu 14.04
解决方法:
rosdep install --from-paths src --ignore-src --rosdistro indigo -y
d.由于导航包在/cmd_val下发布的移动数据加速度会过于不友好,所以我们需要对速度做平滑处理,其实就是控制加速,一般通过滤波即可实现,在此我们采用turtlebot的平滑包即可,
安装平滑包yocs_velocity_smoother,具体的平滑算法和输入切换请自己阅读源码。
apt-get install ros-indigo-yocs-velocity-smoother
所有的包准包好后,我们去准备启动所需的launch文件,首先是机器人地盘的启动文件base_controller.launch:

<launch>
<param name="use_sim_time" value="false" />
<node name="link_laser" pkg="tf" type="static_transform_publisher" args="0.15 0 0.15 0 0 0 base_link laser 50"/>
<node name="link_footprint" pkg="tf" type="static_transform_publisher" args="0 0 0 0 0 0 base_link base_footprint 50"/>
<node pkg="odom_tf_package" type="tf_broadcaster_node" name="serial_send_recevice" output="screen"/>
<include file="$(find odom_tf_package)/launch/include/rplidar_ros.launch.xml">
</include>
<arg name="node_name" value="velocity_smoother"/>
<arg name="nodelet_manager_name" value="nodelet_manager"/>
<arg name="config_file" value="$(find odom_tf_package)/config/yocs_velocity_smoother.yaml"/>
<arg name="raw_cmd_vel_topic" value="cmd_vel"/>
<arg name="smooth_cmd_vel_topic" value="smoother_cmd_vel"/>
<arg name="robot_cmd_vel_topic" value="robot_cmd_vel"/>
<arg name="odom_topic" value="odom"/>
<!-- nodelet manager -->
<node pkg="nodelet" type="nodelet" name="$(arg nodelet_manager_name)" args="manager"/>
<!-- velocity smoother -->
<include file="$(find yocs_velocity_smoother)/launch/velocity_smoother.launch">
<arg name="node_name" value="$(arg node_name)"/>
<arg name="nodelet_manager_name" value="$(arg nodelet_manager_name)"/>
<arg name="config_file" value="$(arg config_file)"/>
<arg name="raw_cmd_vel_topic" value="$(arg raw_cmd_vel_topic)"/>
<arg name="smooth_cmd_vel_topic" value="$(arg smooth_cmd_vel_topic)"/>
<arg name="robot_cmd_vel_topic" value="$(arg robot_cmd_vel_topic)"/>
<arg name="odom_topic" value="$(arg odom_topic)"/>
</include>
</launch>
2.然后去准备建图包的启动文件gmapping.launch
<launch>
<arg name="scan_topic" default="scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" clear_params="true">
<!--because my used rtabmap_ros -->
<param name="odom_frame" value="/odom""/>
<!--param name="odom_frame" value="/base_controller/odom""/-->
<param name="map_update_interval" value="30.0"/>
<!-- Set maxUrange < actual maximum range of the Laser -->
<param name="maxRange" value="5.0"/>
<param name="maxUrange" value="4.5"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
3,导航包(move_base)和定位(amcl)的启动文件:savvy_amcl.launch
<launch> <param name="use_sim_time" value="false" /> <!-- Set the name of the map yaml file: can be overridden on the command line. -->
<arg name="map" default="map.yaml" /> <!--node name="map_odom" pkg="tf" type="static_transform_publisher" args="0 0 0 0 0 0 map odom 50"/--> <!-- Run the map server with the desired map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find savvy)/maps/$(arg map)"/> <!-- The move_base node -->
<include file="$(find savvy)/launch/move_base_amcl.launch" /> <!--zxw add Fire up AMCL-->
<include file="$(find savvy)/launch/tb_amcl.launch" /> </launch>
move_base_amcl.launch:
<launch> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find savvy)/config/savvyconfig/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find savvy)/config/savvyconfig/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find savvy)/config/savvyconfig/local_costmap_params.yaml" command="load" />
<rosparam file="$(find savvy)/config/savvyconfig/global_costmap_params.yaml" command="load" />
<rosparam file="$(find savvy)/config/savvyconfig/base_local_planner_params.yaml" command="load" /> <rosparam file="$(find savvy)/config/nav_obstacles_params.yaml" command="load" />
</node> </launch>
tb_amcl.launch:
<launch>
<arg name="use_map_topic" default="false"/>
<arg name="scan_topic" default="scan"/>
<node pkg="amcl" type="amcl" name="amcl" clear_params="true">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.25"/>
<param name="update_min_a" value="0.2"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<!-- Increase tolerance because the computer can get quite busy -->
<param name="transform_tolerance" value="1.0"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
4.导航的配置参数如下:
base_local_planner_params.yaml
controller_frequency: 2.0
recovery_behavior_enabled: false
clearing_rotation_allowed: false TrajectoryPlannerROS:
max_vel_x: 0.3
min_vel_x: 0.05
max_vel_y: 0.0 # zero for a differential drive robot
min_vel_y: 0.0
min_in_place_vel_theta: 0.5
escape_vel: -0.1
acc_lim_x: 2.5
acc_lim_y: 0.0 # zero for a differential drive robot
acc_lim_theta: 3.2 holonomic_robot: false
yaw_goal_tolerance: 0.1 # about 6 degrees
xy_goal_tolerance: 0.15 # 10 cm
latch_xy_goal_tolerance: false
pdist_scale: 0.8
gdist_scale: 0.6
meter_scoring: true heading_lookahead: 0.325
heading_scoring: false
heading_scoring_timestep: 0.8
occdist_scale: 0.1
oscillation_reset_dist: 0.05
publish_cost_grid_pc: false
prune_plan: true sim_time: 2.5
sim_granularity: 0.025
angular_sim_granularity: 0.025
vx_samples: 8
vy_samples: 0 # zero for a differential drive robot
vtheta_samples: 20
dwa: true
simple_attractor: false
costmap_common_params.yaml
obstacle_range: 2.5
raytrace_range: 3.0
robot_radius: 0.30
inflation_radius: 0.15
max_obstacle_height: 0.6
min_obstacle_height: 0.0
observation_sources: scan
scan: {data_type: LaserScan, topic: /scan, marking: true, clearing: true, expected_update_rate: 0}
global_costmap_params.yaml
global_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 1.0
publish_frequency: 0
static_map: true
rolling_window: false
resolution: 0.01
transform_tolerance: 0.5
map_type: costmap
local_costmap_params.yaml
local_costmap:
global_frame: /odom
robot_base_frame: /base_link
update_frequency: 1.0
publish_frequency: 1.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.01
transform_tolerance: 0.5
map_type: costmap
四,准备好以上所有的启动文件和配置参数后,我们开始创建地图和导航,
1.创建地图:
roslaunch savvy base_controller.launch //启动地盘控制器
roslaunch savvy gmapping.launch
roscd savvy/maps/
rosrun map_server map_saver -f mymap 然后会产生以下地图文件
mymap.pgm mymap.yaml
2.开始导航
roslaunch savvy base_controller.launch //启动地盘控制器
roslaunch savvy savvy_amcl.launch map:=mymap.yaml
rosrun rviz rviz -d `rospack find savvy`/nav_test.rviz
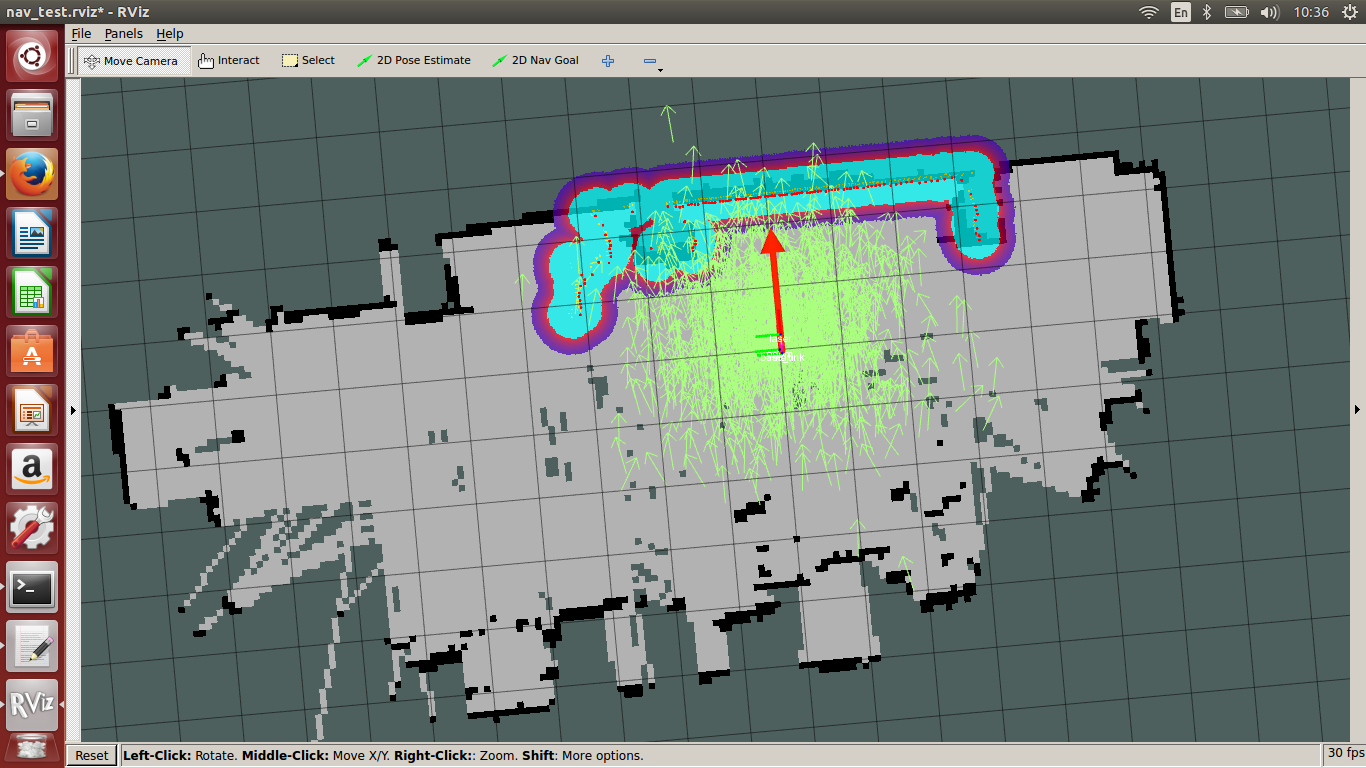
然后指定导航目标,开始自己慢慢玩吧,不过因为我的TF变换主要是里程计更新的,车体打滑或者地盘电机震荡都会积累误差,所以我们必须添加视觉里成计或者闭环检测。
move_base的更多相关文章
- 利用move_base导航--42
摘要: 原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/ 各位博友好长时间又没有写博客了,突然发现上班和在学校是不一样的,在公司的却没有时间写博客了,不过 ...
- 使用move_base导航 ---13
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 我们现在准备用move_base简单的移动机器人记住,一个“pose”在ros的意思是一个位置和 ...
- ROS探索总结(十四)——move_base(路径规划)
在上一篇的博客中,我们一起学习了ROS定位于导航的总体框架,这一篇我们主要研究其中最重要的move_base包. 在总体框架图中可以看到,move_base提供了ROS导航的配置.运行.交互接口,它主 ...
- Navigation包中的move_base和amcl实现自动驾驶
安装功能包: 1.安装导航定位包navigation $ sudo apt-get install ros-indigo-navigation 2.由于导航包在/cmd_val下发布的移动数据加速度会 ...
- move_base代码学习一
System overview move_base 源码 API nav_core BaseGlobalPlanner BaseLocalPlanner RecoveryBehavior Recove ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ros move_base costmap 理解和实现动态窗口法避障
以下大部分内容参考自 ros_by_example_hydro_volume_1.pdf local costmap 是怎么生成的?跟三维点云有什么关系? global costmap在没有全局地图下 ...
- gazebo仿真踩坑--rviz中设定机器人的目标位置,move_base后台日志报错
启动仿真环境及各种节点(amcl,move_base,map_server)后,在rviz中设定机器人的目标位置,后台日志报错 [ INFO] [1571974242.864525935, 40.51 ...
- Navigation源码(一) move_base最全解析
一.概述 目测是全网最全的解析,花了几个小时通读并整理的,供大家参考学习. 概况的话可以看下古月居 https://www.guyuehome.com/270,其实它是翻译官方的,英语ok的可以去ro ...
随机推荐
- bzoj 2212 : [Poi2011]Tree Rotations (线段树合并)
题目链接:https://www.lydsy.com/JudgeOnline/problem.php?id=2212 思路:用线段树合并求出交换左右儿子之前之后逆序对的数量,如果数量变小则交换. 实现 ...
- Web项目替换jar包中的文件的方法
经常遇到这样的问题,需要修改jar包中的方法.应该如何做? 1.有些很人性化的框架jar包,比如SpringSecurity,可以修改配置文件指定一个新建的类,让类实现Jar包中的对应的接口就好了. ...
- day30 __hash__ 计算哈希值
hash() # __hash__哈希的时候会根据内存地址进行哈希,因为地址不同所以哈希的值也不同,哪怕是完全一样子的属性得出的哈希值也不一样因此存在需要某些时刻期望属性相同得出相同哈希值可以控制对象 ...
- day11 高阶函数 函数式编程
高阶函数,满足 接收函数作为参数或者返回有函数 函数可以当做参数传递给另一个函数 def foo(n): print(n) def bar(name): print("my name is ...
- 面试官问我,使用Dubbo有没有遇到一些坑?我笑了
17年的时候,因为一时冲动没把持住(当然最近也有粉丝叫我再冲动一把再更新一波),结合面试题写了一个系列的Dubbo源码解析.目前公众号大部分粉丝都是之前的粉丝,这里不过多介绍. 根据我的面试经验而言, ...
- Android中用文件初始化sqlite 数据库(二)
博 androidsqlite启动时数据库初始化 方法1已经讲述了一种初始化数据库的方法 它的数据库初始化不是用sql语句,而是用一个现成的sqlite的二进制文件进行直接copy到Android系 ...
- 再谈一次关于Java中的 AIO(异步IO) 与 NIO(非阻塞IO)
今天用ab进行压力测试时,无意发现的: Requests per second: xxx [#/sec] (mean) ab -n 5000 -c 1000 http://www:8080/up ...
- 使用photoshop以及markman进行快速重构页面的几个步骤
先来几个photoshop打开psd图的标准动作. ctrl+,ctrl-,放大,缩小psd图的.查看字体大小看T等等. 想psd图出现刻度 你只需要"> 设置度量单位为像素之后,打开 ...
- HTML中使用<input>添加的按钮打开一个链接
在HTML中,<form>表单的<input type="button">可以添加一个按钮.如果想让该按钮实现<a> 的超链接功能,需要如下实现 ...
- frp源码剖析-frp中的log模块
前言&引入 一个好的log模块可以帮助我们排错,分析,统计 一般来说log中需要有时间.栈信息(比如说文件名行号等),这些东西一般某些底层log模块已经帮我们做好了.但在业务中还有很多我们需要 ...