STM32F412应用开发笔记之九:移植FreeRTOS到F412ZG平台
在开发实际应用系统时,我们经常需要考虑数据的实时性和多任务,嵌入式实时操作系统的出现为实现这一目的提供了很好的助力。FreeRTOS是近年来比较流行的嵌入式实时操作系统,而且是开源免费的,STM32CubeMX对它也提供了支持。我们可以使用STM32CubeMX很方便的添加上FreeRTOS,只需要在配置界面找到“MiddleWares”并将其下的FreeRTOS选为“Enable”就可添加上FreeRTOS:
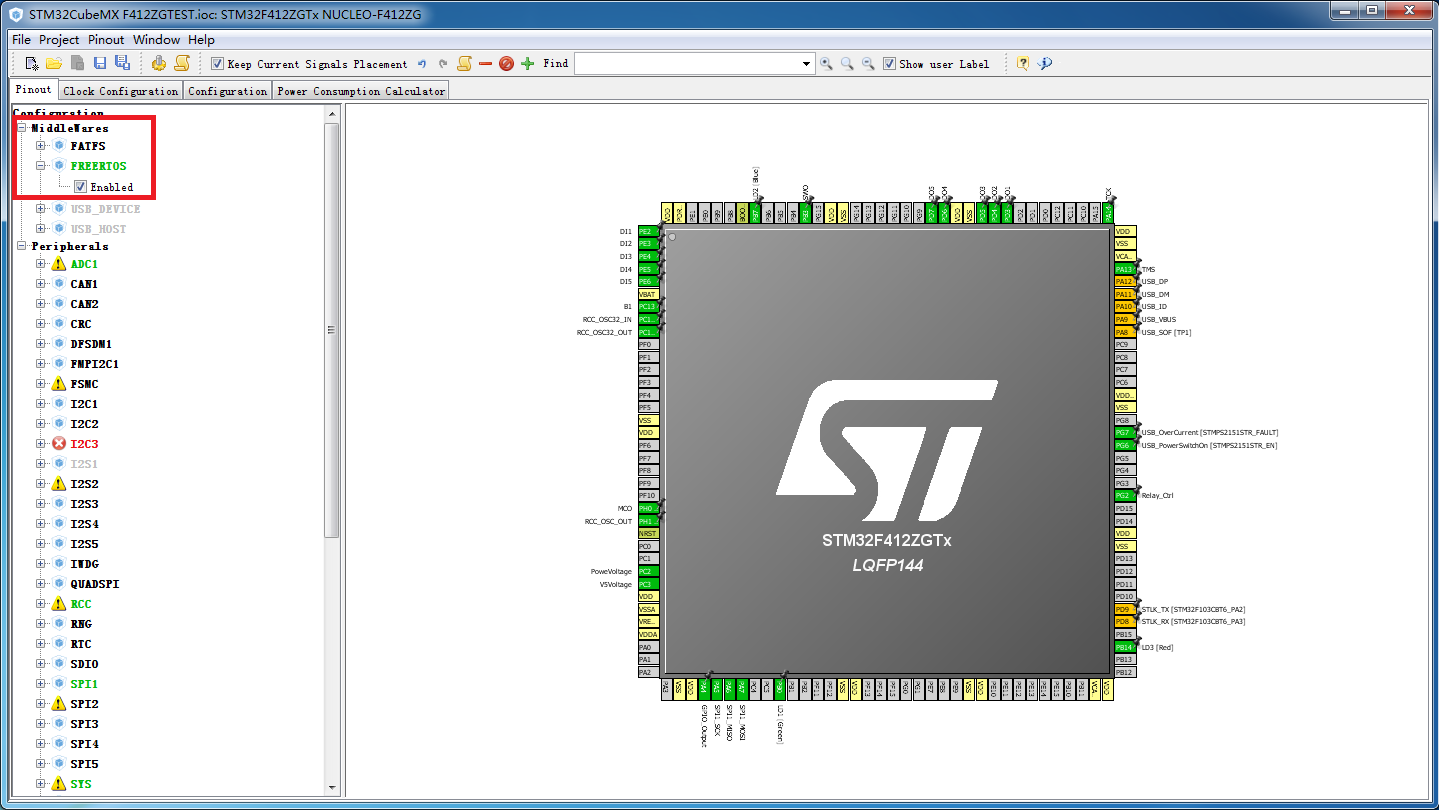
配置完成后,更新源码就会在软件中添加上FreeRTOS的相关文件,各文件的功能网上已经有很多介绍,就不啰嗦了,而且也不属于我们需要说明的内容。

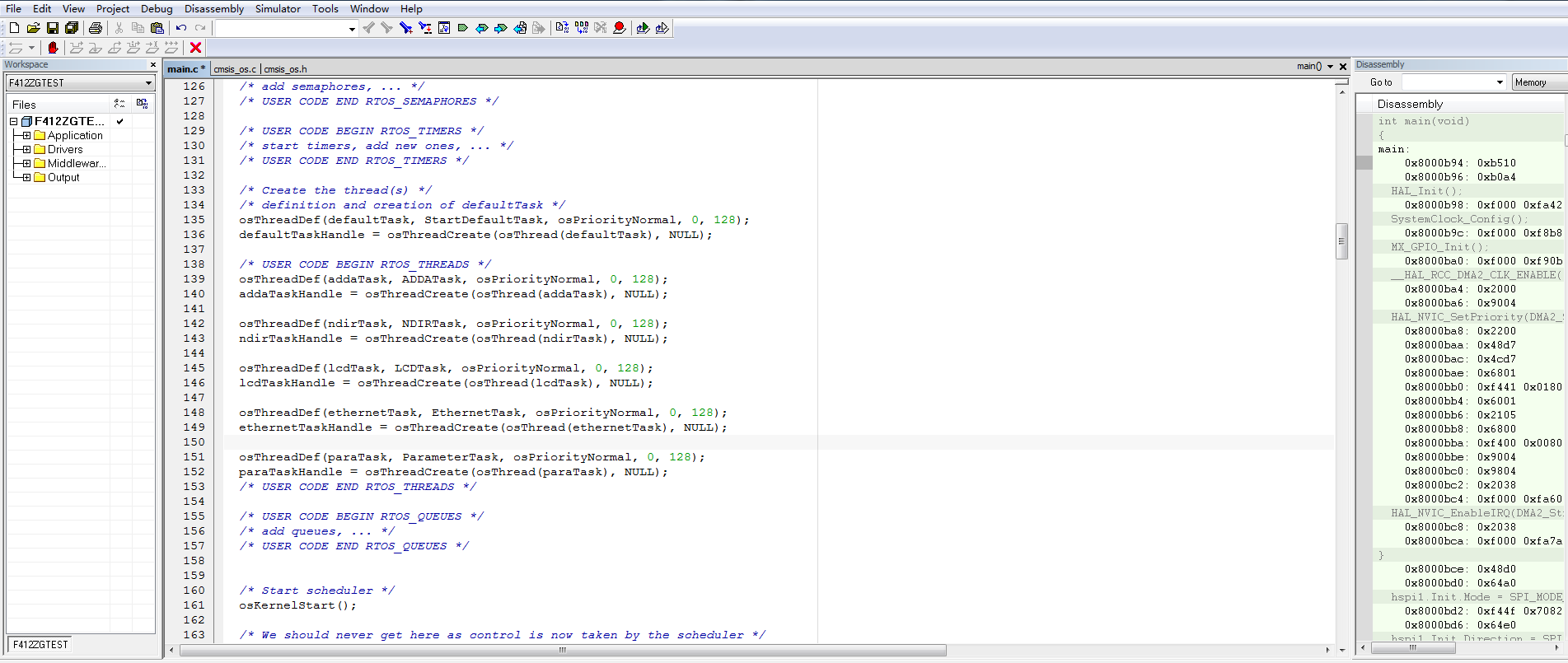
添加完了之后,源码中就会添加创建一个缺省任务的代码。因为最少要有一个任务才有意义。查看main()函数,就会出现如下这样一段代码:
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Start scheduler */
osKernelStart();
其实这段代码就实现两个功能:创建任务和情动任务调度。不过ST在FreeRTOS的基础上做了进一步的封装。其中osKernelStart()函数用于启动任务调度,这个函数比较简单只不过是调用了一下FreeRTOS中的任务调度函数vTaskStartScheduler(),其实现原型如下:
osStatus osKernelStart (void)
{
vTaskStartScheduler();
return osOK;
}
而实现任务创建的就是osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);和defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);这两行代码。这两行代码就是创建了一个任务显示名称为defaultTask的StartDefaultTask任务。带是代码看起来有点不容易理解,其实是ST进行了进一步封装的结果。
首先osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128)其实是一个宏,其定义的原型如下:
#define osThreadDef(name, thread, priority, instances, stacksz) \
const osThreadDef_t os_thread_def_##name = \
{ #name, (thread), (priority), (instances), (stacksz) }
那么osThreadDef_t又是个什么呢?其实是ST定义的创建任务的参数结构体:
typedef struct os_thread_def {
char *name; ///< Thread name
os_pthread pthread; ///< start address of thread function
osPriority tpriority; ///< initial thread priority
uint32_t instances; ///< maximum number of instances of that thread function
uint32_t stacksize; ///< stack size requirements in bytes; 0 is default stack size
} osThreadDef_t;
所以第一句的含义就很明确了,就是定义了一个osThreadDef_t类型的变量用于存储用于创建任务的参数。第二句很明显是一个函数调用,但参数与我们见到的FreeRTOS中的创建任务的函数有些不同。其实它的第一个参数osThread(defaultTask)也是一宏:
#define osThread(name) \
&os_thread_def_##name
其实就是调用第一句中定义的osThreadDef_t类型的结构体变量。这样就明确了,第二句实际上就是调用FreeRTOS中的任务创建函数创建任务:
osThreadId osThreadCreate (const osThreadDef_t *thread_def, void *argument)
{
TaskHandle_t handle;
if (xTaskCreate((TaskFunction_t)thread_def->pthread,(const portCHAR *)thread_def->name,
thread_def->stacksize, argument, makeFreeRtosPriority(thread_def->tpriority),
&handle) != pdPASS) {
return NULL;
}
return handle;
}
所以我们要创建其他的任务,只需照此设计即可。当然任务中的内容根据需要修改,STM32CubeMX添加的缺省任务,参数和实现内容也可以更改。在这里我们不对缺省任务做太多修改,在其任务函数中添加部分我们的内容。
考虑到我们所应用到的功能,我们需要6个任务,利用上缺省任务我们还需要添加5个任务。之所以要添加这么多的任务是因为我们不想让各种功能相互影响。在某一外设出现操作错误时不会影响其他部分的应用,这也是我们使用多任务实时操作系统的原因之一。
缺省任务我们让它来跑逻辑控制。再增加几个任务分别来跑各种功能,由于AD和DA都是通过SPI1通讯来完成的,所以采用同一个任务。
首先定义几个任务操作句柄:
/*定义任务句柄*/
osThreadId defaultTaskHandle;
osThreadId addaTaskHandle;
osThreadId ndirTaskHandle;
osThreadId lcdTaskHandle;
osThreadId ethernetTaskHandle;
osThreadId paraTaskHandle;
在声明对应的任务处理函数:
/*声明任务处理函数*/
void StartDefaultTask(void const * argument);
void ADDATask(void const * argument);
void NDIRTask(void const * argument);
void LCDTask(void const * argument);
void EthernetTask(void const * argument);
void ParameterTask(void const * argument);
编写各任务处理函数,由于各种功能在之前已经实现了所以任务函数比较简单:
/* 缺省任务,用来处理逻辑控制 */
void StartDefaultTask(void const * argument)
{
for(;;)
{
/*逻辑处理*/
LogicOperation();
osDelay(1);
}
}
/* AD/DC数据处理任务函数 */
void ADDATask(void const * argument)
{
for(;;)
{
/*获取AD采集的测量值*/
GetMeasuredValue();
/*设置模拟量输出*/
SetOutputValue();
osDelay(1);
}
}
/* 远红外炭氢检测数据处理任务函数 */
void NDIRTask(void const * argument)
{
for(;;)
{
/*获取CH4测量值*/
GetNDIRData();
osDelay(1);
}
}
/* LCD显示通讯处理任务函数 */
void LCDTask(void const * argument)
{
for(;;)
{
/*显示屏数据通讯*/
LCD_DataExchange();
osDelay(1);
}
}
/* 以太网通讯处理任务函数 */
void EthernetTask(void const * argument)
{
for(;;)
{
/*以太网通讯处理*/
EthernetProcess();
osDelay(1);
}
}
/* 参数存取处理任务函数 */
void ParameterTask(void const * argument)
{
for(;;)
{
/*参数的存储、恢复等处理*/
ParameterProcess();
osDelay(1);
}
}
再在系统中创建任务:
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* USER CODE BEGIN RTOS_THREADS */
osThreadDef(addaTask, ADDATask, osPriorityNormal, 0, 128);
addaTaskHandle = osThreadCreate(osThread(addaTask), NULL);
osThreadDef(ndirTask, NDIRTask, osPriorityNormal, 0, 128);
ndirTaskHandle = osThreadCreate(osThread(ndirTask), NULL);
osThreadDef(lcdTask, LCDTask, osPriorityNormal, 0, 128);
lcdTaskHandle = osThreadCreate(osThread(lcdTask), NULL);
osThreadDef(ethernetTask, EthernetTask, osPriorityNormal, 0, 128);
ethernetTaskHandle = osThreadCreate(osThread(ethernetTask), NULL);
osThreadDef(paraTask, ParameterTask, osPriorityNormal, 0, 128);
paraTaskHandle = osThreadCreate(osThread(paraTask), NULL);
/* USER CODE END RTOS_THREADS */
至此在系统中添加FreeRTOS的过程完成,编译调试看看结果:
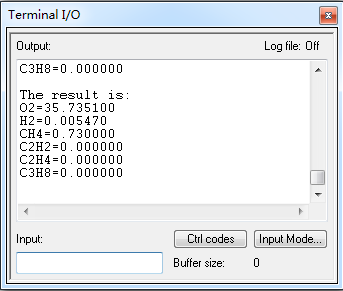
编译无错误,运行正常。通过IO中断看看运行结果与没有操作系统时有没有区别:
在运行一段时间后再看看结果:
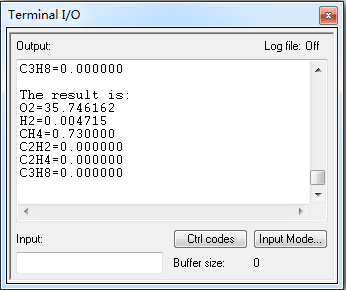
系统运行无误,与我们所希望的一样。
STM32F412应用开发笔记之九:移植FreeRTOS到F412ZG平台的更多相关文章
- FFmpeg开发笔记(九):ffmpeg解码rtsp流并使用SDL同步播放
前言 ffmpeg播放rtsp网络流和摄像头流. Demo 使用ffmpeg播放局域网rtsp1080p海康摄像头:延迟0.2s,存在马赛克 使用ffmpeg播放网络rtsp文件流 ...
- Java开发笔记(九十一)IO流处理简单的数据压缩
前面介绍的文件I/O,不管是写入文本还是写入对象,文件中的数据基本是原来的模样,用记事本之类的文本编辑软件都能浏览个大概.这么存储数据,要说方便确实方便,只是不够经济划算,原因有二:其一,写入的数据可 ...
- Java开发笔记(九十七)利用Runnable启动线程
前面介绍了线程的基本用法,按理说足够一般的场合使用了,只是每次开辟新线程,都得单独定义专门的线程类,着实开销不小.注意到新线程内部真正需要开发者重写的仅有run方法,其实就是一段代码块,分线程启动之后 ...
- STM32F412应用开发笔记之五:结合W5500实现以太网通讯
因实际使用需求我们测试一下网络通讯,在NUCLEO-F412ZG测试板上没有以太网部分,我们选择外接一个W5500的实验板.W5500支持SPI接口通讯,DC3.3V供源.而NUCLEO-F412ZG ...
- STM32F412应用开发笔记之一:初识NUCLEO-F412ZG
今天终于收到了期待已久的NUCLEO-F412ZG,感谢电子发烧友论坛! 近几年来基本都是在STM32平台上做一些设计开发工作.STM32F103.STM32F107.STM32F429等都应用过,但 ...
- STM32F412应用开发笔记之三:SPI总线通讯与AD采集
本次我们在NUCLEO-F412ZG试验模拟量输入采集.我们的模拟量输入采用ADI公司的AD7705,是一片16位两路差分输入的AD采集芯片.具有SPI接口,我们将采用SPI接口与AD7705通讯.两 ...
- STM32F412应用开发笔记之二:基本GPIO控制
NUCLEO-F412ZG板子上的元器件并没有完全焊接,除去ST-LINK部分和电源部分后,还有用一个USB主机接口,三个LED灯和两个按钮,不过很多功能引脚都已经引到了插针.查看原理图可发现,由原理 ...
- Modbus库开发笔记之九:利用协议栈开发Modbus TCP Server应用
前面我们已经完成了Modbus协议栈的开发,但这不是我们的目的.我们开发它的目的当然是要使用它来解决我们的实际问题.接下来我们就使用刚开发的Modbus协议栈开发一个Modbus TCP Server ...
- STM32F412应用开发笔记之十:多组分气体分析仪设计验证
本次将NUCLEO-F412ZG应用于我们的多组分气体分析仪的实现试验,从整体上测试实际项目的应用情况. 一.项目概述 多组分气体分析仪是我公司近期研发的三个主要产品之一.采用模块化设计,可增减配置, ...
随机推荐
- 字节流转字符流OutputStreamWriter、InputStreamReader,关闭流的方法
转换时可以指定编码格式:GBK.UTF-8 public class Demo { public static void main(String[] args) { File f = new File ...
- 关于navicat远程连接mysql问题
如果你想连接你的mysql的时候发生这个错误: ERROR 1130: Host '192.168.1.81' is not allowed to connect to this MySQL serv ...
- java8中的stream().filter()的使用和Optional()
转: https://www.cnblogs.com/yimiyan/p/5992440.html Optional: https://www.cnblogs.com/zhangboyu/p/7580 ...
- banner轮播无缝滚动 jq代码
HTML: <div class="box"> <ul> <li>11111</li> <li>22222</li ...
- 静态代码块、构造代码块、构造方法优先级(重点)-------java基础总结
package com.mon11.day11; /** * 类说明 : * @author 作者 : chenyanlong * @version 创建时间:2017年11月11日 */ publi ...
- 面向对象【day07】:面向对象引子(一)
本节内容 概述 面向对象引子 面向过程介绍 一.概述 很对人都不理解编程中的面向对象的概念,那我们先来说说面向对象的引子,由这个引子带领我们更好的理解面向对象的概念. 二.面向对象引子 你现在是一家游 ...
- MapReduce与关系型数据库的不同之处。
MapReduce能够被视为RDBMS(关系型数据库)的补充. 1.MapReduce适合处理那些需要分析整个数据集的问题(日志分析等),以批处理的方式.RDBMS适合做点查询和更新. 2.MapRe ...
- JS 中函数名后面加与不加括号的区别
a.onmouseover = fn1; a.onmouseout = fn2; function fn1(){ div.className = "erweima show"; } ...
- Hbase记录-Hbase调优参数
- 如何用matplotlib绘制决策边界
import matplotlib.pyplot as plt import numpy as np import sklearn import sklearn.datasets import skl ...